S-ar putea să vă placă și
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- Amd ProcessorDocument22 paginiAmd ProcessorAli Haider FahadÎncă nu există evaluări
- Rallison Cable Derating HandbookDocument13 paginiRallison Cable Derating Handbookkb_pramodÎncă nu există evaluări
- Enhancing Embedded Systems Simulation A Chip Hardware in The Loop FrameworkDocument247 paginiEnhancing Embedded Systems Simulation A Chip Hardware in The Loop FrameworkHECTOR H SANCHEZÎncă nu există evaluări
- Nvidia CudaDocument26 paginiNvidia CudaArpit VijayvergiaÎncă nu există evaluări
- FKM - CommentaryDocument22 paginiFKM - CommentaryIan Smith0% (1)
- Embedded Systems SoftwareDocument28 paginiEmbedded Systems SoftwareYatish KÎncă nu există evaluări
- Microsoft Orleans For Developers Build Cloud-Native, High-Scale, Distributed Systems in .NET Using Orleans (Richard Astbury)Document144 paginiMicrosoft Orleans For Developers Build Cloud-Native, High-Scale, Distributed Systems in .NET Using Orleans (Richard Astbury)ML GoreÎncă nu există evaluări
- Tesla K40 Active Board Spec BD 06949 001 - v03 PDFDocument25 paginiTesla K40 Active Board Spec BD 06949 001 - v03 PDFKiran Jot SinghÎncă nu există evaluări
- Screw Size and ToleranceDocument92 paginiScrew Size and Tolerancenick10686100% (1)
- Unbrako Fasteners Catalog PDFDocument91 paginiUnbrako Fasteners Catalog PDFJohney TanÎncă nu există evaluări
- Rivet Handbook: Blind Rivets GuideDocument15 paginiRivet Handbook: Blind Rivets GuidenextreaderÎncă nu există evaluări
- The Ultimate Guide To Optimize Your Windows PC For The StageDocument92 paginiThe Ultimate Guide To Optimize Your Windows PC For The StageJoerg FranzÎncă nu există evaluări
- KVRRao Resume Revised NGIT PDFDocument6 paginiKVRRao Resume Revised NGIT PDFDr. KVR RaoÎncă nu există evaluări
- Securing Network-on-Chip Using Incremental CryptographyDocument8 paginiSecuring Network-on-Chip Using Incremental CryptographyRaynaldy Mahdi PutraÎncă nu există evaluări
- Process ManagementDocument184 paginiProcess ManagementPark DylanÎncă nu există evaluări
- Deploying Allot Solutions Over An ESXi Hypervisor 16.5Document55 paginiDeploying Allot Solutions Over An ESXi Hypervisor 16.5No SÎncă nu există evaluări
- Solidworks Hardware Recommendations - 2016 UpdateDocument16 paginiSolidworks Hardware Recommendations - 2016 UpdateAn CarÎncă nu există evaluări
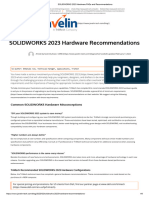
- SOLIDWORKS 2023 Hardware FAQs and RecommendationsDocument6 paginiSOLIDWORKS 2023 Hardware FAQs and Recommendationsotokar2Încă nu există evaluări
- T110II SpecSheetDocument2 paginiT110II SpecSheetint4400Încă nu există evaluări
- Design For PerformanceDocument34 paginiDesign For Performancec0de517e.blogspot.com100% (1)
- WBNR La Auto BCM SpanishDocument41 paginiWBNR La Auto BCM SpanishHaragopal KrishnaÎncă nu există evaluări
- Dell Precision T3500 BrochureDocument2 paginiDell Precision T3500 BrochureMatthew WilliamsÎncă nu există evaluări
- Computer ReportDocument57 paginiComputer ReportStar ForuÎncă nu există evaluări
- Multicore Cache EnergyDocument19 paginiMulticore Cache EnergyAniket MasalkhambÎncă nu există evaluări
- CH01 COA11eDocument45 paginiCH01 COA11eTam TranÎncă nu există evaluări
- 04.huawei Atlas Data Center AI TrainingDocument22 pagini04.huawei Atlas Data Center AI TrainingESG NOMANÎncă nu există evaluări
- Mu Os Fall 2020 ch01 IntroductionDocument54 paginiMu Os Fall 2020 ch01 IntroductionAbdallateef ShohdyÎncă nu există evaluări
- Zynq Ultrascale Plus Product Selection GuideDocument16 paginiZynq Ultrascale Plus Product Selection GuideDinh Thang LeÎncă nu există evaluări
- Engineers Guide To Embedded Linux and AndroidDocument44 paginiEngineers Guide To Embedded Linux and AndroidMaciej KlimkiewiczÎncă nu există evaluări
- Scheme of Work ICTDocument19 paginiScheme of Work ICTalamphyÎncă nu există evaluări
- LifeSize Virtual Link DatasheetDocument2 paginiLifeSize Virtual Link DatasheetdaipatpatÎncă nu există evaluări
- Presentation For Apple M1 ChipDocument16 paginiPresentation For Apple M1 ChipVilayat Ali100% (1)
- Integrity RtosDocument12 paginiIntegrity RtosgloriafleximaÎncă nu există evaluări
- Dell Vostro 15-3558 Owner's Manual: Regulatory Model: P52F Regulatory Type: P52F001Document50 paginiDell Vostro 15-3558 Owner's Manual: Regulatory Model: P52F Regulatory Type: P52F001Popescu Viorel-MihaiÎncă nu există evaluări