S-ar putea să vă placă și
- Wireless Power TransmissionDocument5 paginiWireless Power TransmissionNiranjan TawareÎncă nu există evaluări
- Rogowski Coil 1Document4 paginiRogowski Coil 1sanjaybmscseÎncă nu există evaluări
- High-Pass and Low-Pass FiltersDocument5 paginiHigh-Pass and Low-Pass FiltersnayrochfrÎncă nu există evaluări
- 2008 Rrazavi A Millimeter-Wave Circuit Technique PDFDocument9 pagini2008 Rrazavi A Millimeter-Wave Circuit Technique PDFrahmanakberÎncă nu există evaluări
- A High Current Pulse Generator For Magnetizing Thin Magnetic FilmsDocument3 paginiA High Current Pulse Generator For Magnetizing Thin Magnetic FilmslakisÎncă nu există evaluări
- SSB Exciter Circuits Using The 7360Document10 paginiSSB Exciter Circuits Using The 7360Rose Ann SarcedaÎncă nu există evaluări
- Ee 2Document19 paginiEe 2Joshua AngeloÎncă nu există evaluări
- Microcontroller Oscillator Circuit Design PDFDocument12 paginiMicrocontroller Oscillator Circuit Design PDFmike_helplineÎncă nu există evaluări
- Low-Power Double-Edge Triggered Flip-Flop: Gerard M BlairDocument5 paginiLow-Power Double-Edge Triggered Flip-Flop: Gerard M Blairsweet2shineÎncă nu există evaluări
- Graphic EqualizerDocument19 paginiGraphic Equalizerpapagiano35100% (1)
- ojsadmin,+Journal+manager,+CH 1966 10 4 4 03 enDocument12 paginiojsadmin,+Journal+manager,+CH 1966 10 4 4 03 enHarsh SinghÎncă nu există evaluări
- "How To Design RF Circuits" - OscillatorsDocument7 pagini"How To Design RF Circuits" - OscillatorsAbbas Bagherifar100% (8)
- DDP SscjeDocument2 paginiDDP Sscjebinit ranjanÎncă nu există evaluări
- One Coil Induction Metal DetectorDocument22 paginiOne Coil Induction Metal DetectorGeorge LucianÎncă nu există evaluări
- A Simpte Sigiual Geiuerator: James ( - OssaDocument3 paginiA Simpte Sigiual Geiuerator: James ( - OssaAnonymous hPUlIF6Încă nu există evaluări
- Electronic Instrument atDocument8 paginiElectronic Instrument atkushalchandel0% (1)
- NJ 10 WDocument14 paginiNJ 10 WmuszereszÎncă nu există evaluări
- PE QuestionBankDocument6 paginiPE QuestionBankRakshith0% (1)
- PG Instrumentation HOME WORKDocument2 paginiPG Instrumentation HOME WORKElvis AgbadobiÎncă nu există evaluări
- IMG - 0532 EE PreBoard Exam 12cDocument1 paginăIMG - 0532 EE PreBoard Exam 12clet ramÎncă nu există evaluări
- 5.8Ghz Circularly Polarized Rectennas Using Schottky Diode and Ltc5535 Rectifier For RF Energy HarvestingDocument4 pagini5.8Ghz Circularly Polarized Rectennas Using Schottky Diode and Ltc5535 Rectifier For RF Energy HarvestingNag ChallaÎncă nu există evaluări
- Simple AM Receiver&TransmitterDocument4 paginiSimple AM Receiver&TransmitterGokulk2011100% (2)
- V An Innovative Magnetic Field Sweep Unit: of of of ofDocument20 paginiV An Innovative Magnetic Field Sweep Unit: of of of ofBerthaFloresÎncă nu există evaluări
- Meter Moving CoilDocument4 paginiMeter Moving Coilabecdf100% (1)
- Nuclear Instruments and Methods in Physics Research BDocument4 paginiNuclear Instruments and Methods in Physics Research BguiburÎncă nu există evaluări
- EE 370 Electronic Instrument Assignment 3Document1 paginăEE 370 Electronic Instrument Assignment 3vineet mishraÎncă nu există evaluări
- Magneticremote ControlDocument3 paginiMagneticremote ControlBóza GyörgyÎncă nu există evaluări
- Mulvaney Graham 352 Lab 1Document6 paginiMulvaney Graham 352 Lab 1api-125239608Încă nu există evaluări
- Verificationof Rogowski Current Transducers Abilityto Measure Fast Switching TransientsDocument7 paginiVerificationof Rogowski Current Transducers Abilityto Measure Fast Switching Transientsmauro_valdÎncă nu există evaluări
- Electronics RefresherDocument2 paginiElectronics RefresherPaolo Steven PolintanÎncă nu există evaluări
- Lab5: Mixer: Group# Specifications For Mixer 900Mhz, 90-Degree 2Ghz, 90-Degree 3Ghz, 90-Degree 5Ghz, 90-DegreeDocument6 paginiLab5: Mixer: Group# Specifications For Mixer 900Mhz, 90-Degree 2Ghz, 90-Degree 3Ghz, 90-Degree 5Ghz, 90-DegreePaul ShineÎncă nu există evaluări
- 151003Document2 pagini151003Er Nikesh PatelÎncă nu există evaluări
- Ece481-Microwave and Optical Communication Laboratory ManualDocument44 paginiEce481-Microwave and Optical Communication Laboratory Manualeceklu100% (1)
- QDocument10 paginiQThet Paing Phyoe ecÎncă nu există evaluări
- Exercise Chapter 2Document7 paginiExercise Chapter 2DonkeyTank67% (3)
- Development of An Exponential TaperedDocument4 paginiDevelopment of An Exponential TaperedFabian VazquezÎncă nu există evaluări
- DiodeDocument6 paginiDiodepetrishia7_317164251Încă nu există evaluări
- Development of A High Frequency and High-Voltage Pulse Transformer For A TWT HvpsDocument4 paginiDevelopment of A High Frequency and High-Voltage Pulse Transformer For A TWT HvpsShyam SuryaÎncă nu există evaluări
- Oscillator NotesDocument11 paginiOscillator NotesHarsh SinghÎncă nu există evaluări
- Prochazka 2015Document4 paginiProchazka 2015Radouan RadwanÎncă nu există evaluări
- Series and Parallel ResistanceDocument9 paginiSeries and Parallel ResistancejuanÎncă nu există evaluări
- Inductor SimulatorDocument17 paginiInductor SimulatorwindfocusÎncă nu există evaluări
- 7MHz CW AM QRP TransmitterDocument3 pagini7MHz CW AM QRP TransmitterVijay MirjeÎncă nu există evaluări
- IGBT: A Solid State SwitchDocument9 paginiIGBT: A Solid State Switchnagaraj p sÎncă nu există evaluări
- Analogue Electronics: 14. Transistor Circuits For The ConstructorDocument27 paginiAnalogue Electronics: 14. Transistor Circuits For The ConstructorNuraddeen MagajiÎncă nu există evaluări
- August 2015Document22 paginiAugust 2015MIRA JHON MICHAELÎncă nu există evaluări
- Lab Report of Analogue ElectronicDocument8 paginiLab Report of Analogue ElectronicKing EverestÎncă nu există evaluări
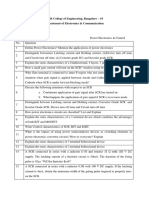
- Senkottai Village, Madurai - Sivagangai Main Road, Madurai - 625 020. (An ISO 9001:2008 Certified Institution)Document23 paginiSenkottai Village, Madurai - Sivagangai Main Road, Madurai - 625 020. (An ISO 9001:2008 Certified Institution)Raji SharmiÎncă nu există evaluări
- Nonlinear Effects in Oscillators and SynthesizersDocument23 paginiNonlinear Effects in Oscillators and SynthesizersAKISÎncă nu există evaluări
- Stuart1 150Document6 paginiStuart1 150Rafael PiccoÎncă nu există evaluări
- Module: ELEC 7 Total Questions: 100 Total Recorded: 102: AnswerDocument6 paginiModule: ELEC 7 Total Questions: 100 Total Recorded: 102: AnswerJomarCalacagÎncă nu există evaluări
- Designing 915Mhz Oscillator Project Report Ee172 For Dr. KwokDocument21 paginiDesigning 915Mhz Oscillator Project Report Ee172 For Dr. KwokjgalindesÎncă nu există evaluări
- EE300 Assignment1Document3 paginiEE300 Assignment1Gingka HaganeÎncă nu există evaluări
- Mini Circuits Vco DesignDocument7 paginiMini Circuits Vco Designtqminh1990Încă nu există evaluări
- Newnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1De la EverandNewnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1Evaluare: 4.5 din 5 stele4.5/5 (3)
- Power Supply Projects: A Collection of Innovative and Practical Design ProjectsDe la EverandPower Supply Projects: A Collection of Innovative and Practical Design ProjectsEvaluare: 3 din 5 stele3/5 (2)
- CH 08Document42 paginiCH 08engaydiÎncă nu există evaluări
- Design A Logic ProbeDocument19 paginiDesign A Logic ProbeGregLuckÎncă nu există evaluări
- Proceedings of The IRE Volume 42 Issue 7 1954 (Doi 10.1109/jrproc.1954.274552) Sherr, S. - Generalized Equations For RC Phase-Shift OscillatorsDocument4 paginiProceedings of The IRE Volume 42 Issue 7 1954 (Doi 10.1109/jrproc.1954.274552) Sherr, S. - Generalized Equations For RC Phase-Shift OscillatorsRajesh VermaÎncă nu există evaluări
- Logic Guide - Texas InstrumentsDocument125 paginiLogic Guide - Texas InstrumentsGuillermo HernandezÎncă nu există evaluări
- Diode ClampingDocument12 paginiDiode ClampingSunny KumarÎncă nu există evaluări
- Tutorial DiodeDocument15 paginiTutorial DiodeAravind KumarÎncă nu există evaluări
- First Sem SyllabusDocument2 paginiFirst Sem SyllabusretheeshvkmÎncă nu există evaluări
- BITX VERSION 3 B Updated ColourDocument1 paginăBITX VERSION 3 B Updated ColourDiego García MedinaÎncă nu există evaluări
- DLD Lab Report-1Document13 paginiDLD Lab Report-1Faraz KashifÎncă nu există evaluări
- Read and Write Action of RAM Using IC 7489Document5 paginiRead and Write Action of RAM Using IC 7489Deepak Kumbhar100% (1)
- FSCQ-Series: Green Mode Fairchild Power Switch (FPS)Document44 paginiFSCQ-Series: Green Mode Fairchild Power Switch (FPS)Jose luis Sanchez TrecaquistaÎncă nu există evaluări
- Electronics General Cbcs Draft SyllabusDocument26 paginiElectronics General Cbcs Draft SyllabusAbhay ShawÎncă nu există evaluări
- VTU Notes Basic ElectronicsDocument22 paginiVTU Notes Basic ElectronicsCicira BÎncă nu există evaluări
- فهرس دروس التكوين المهني الإصدار 2Document55 paginiفهرس دروس التكوين المهني الإصدار 2Brahmia M.Încă nu există evaluări
- 21 Bakker JSSC 2000Document7 pagini21 Bakker JSSC 2000kurabyqldÎncă nu există evaluări
- ICS Presentation 2021 26 03 2021Document192 paginiICS Presentation 2021 26 03 2021deevÎncă nu există evaluări
- DigitalDocument186 paginiDigitalAnushaChittiÎncă nu există evaluări
- VLSI Lab Manual Exercise ProblemsDocument38 paginiVLSI Lab Manual Exercise ProblemsPrakhar Kumar100% (1)
- PLL ManualDocument33 paginiPLL Manualmarcos78arÎncă nu există evaluări
- Analogue Integrated Circuit DesignDocument13 paginiAnalogue Integrated Circuit DesignAshraf YusofÎncă nu există evaluări
- Aec Model Question 2021Document2 paginiAec Model Question 2021Ajay kumar GuptaÎncă nu există evaluări
- SCAN Test: Each Portion of Integrated Circuit Is Tested Using ATPG Technique To Detect IntraDocument3 paginiSCAN Test: Each Portion of Integrated Circuit Is Tested Using ATPG Technique To Detect Intrahumtum_shri5736Încă nu există evaluări
- Practical Power e (Amar, Hashim, Fatah, Imran)Document15 paginiPractical Power e (Amar, Hashim, Fatah, Imran)Abdul FatahÎncă nu există evaluări
- Chapter 2 BJT Biasing Ec b2 90 PDFDocument33 paginiChapter 2 BJT Biasing Ec b2 90 PDFpraveenkumar battulaÎncă nu există evaluări
- Lebanese International University School of Arts and Sciences - Department of Computer ScienceDocument6 paginiLebanese International University School of Arts and Sciences - Department of Computer ScienceAli NassarÎncă nu există evaluări
- High-Side Power Switch Ics Spf5017: (Surface-Mount 2-Circuit, Current Monitor Output Function)Document1 paginăHigh-Side Power Switch Ics Spf5017: (Surface-Mount 2-Circuit, Current Monitor Output Function)Adrian WongÎncă nu există evaluări
- Two Digit 7 Segment Display Using 53 Counter Aim:: ApparatusDocument3 paginiTwo Digit 7 Segment Display Using 53 Counter Aim:: Apparatusneha yarrapothuÎncă nu există evaluări
- Digital Electronics Chapter 7Document58 paginiDigital Electronics Chapter 7Pious TraderÎncă nu există evaluări
- Tonepad Flanger301Document1 paginăTonepad Flanger301erwin hernandezÎncă nu există evaluări
- DLD MCQSDocument10 paginiDLD MCQSranaateeq0% (1)