S-ar putea să vă placă și
- 1 Manual de Ejercicios PLDocument82 pagini1 Manual de Ejercicios PLapi-373675978% (64)
- Sistema EndocrinoDocument81 paginiSistema EndocrinoRafael Lopez100% (2)
- Reporte 0 Buenas Prácticas de LaboratorioDocument20 paginiReporte 0 Buenas Prácticas de LaboratorioArmando Beltrán50% (2)
- F. Ramos - Como Abordar El Pluralismo ReligiosoDocument23 paginiF. Ramos - Como Abordar El Pluralismo ReligiosoMatías CórdobaÎncă nu există evaluări
- Problemas ArenaDocument18 paginiProblemas ArenaWilly Campos Lozada100% (2)
- Manual Técnico de ConfecciónDocument114 paginiManual Técnico de ConfecciónJorge Eliecer Delgado100% (2)
- Banco de Preguntas para DocentesDocument11 paginiBanco de Preguntas para DocentesJorge Alberto Palomino Way0% (1)
- Diversidad Sexual (Y Amorosa) - Guillermo Núñez NoriegaDocument49 paginiDiversidad Sexual (Y Amorosa) - Guillermo Núñez NoriegaDany ReMiauuÎncă nu există evaluări
- Ballet, Un Poco de HistoriaDocument53 paginiBallet, Un Poco de Historiaduverney8Încă nu există evaluări
- Tecnicas y Estrategias Metodologicas para El Desarrollo de Habilidades Cognitivas y SocialesDocument12 paginiTecnicas y Estrategias Metodologicas para El Desarrollo de Habilidades Cognitivas y SocialesJhofre Chavez Pastor100% (3)
- Actividad 3 - La Integral Indefinida, Reglas Básicas de Integración - Revisión Del IntentoDocument7 paginiActividad 3 - La Integral Indefinida, Reglas Básicas de Integración - Revisión Del Intentoalejandrarodriguezmen1100% (1)
- Actividad 4.2 Propuesta PEDocument20 paginiActividad 4.2 Propuesta PEalvaro cruzÎncă nu există evaluări
- Caratula Colegio Peruano Chino 10 de OctubreDocument1 paginăCaratula Colegio Peruano Chino 10 de OctubreDavid Martin Espinoza GonzalezÎncă nu există evaluări
- Ayuda7 Conversion de GLP A GN PDFDocument52 paginiAyuda7 Conversion de GLP A GN PDFDavid Martin Espinoza GonzalezÎncă nu există evaluări
- Modelo de Justificacion de InasistenciaDocument1 paginăModelo de Justificacion de InasistenciaDavid Martin Espinoza GonzalezÎncă nu există evaluări
- Energias Problemas Resueltos PDFDocument15 paginiEnergias Problemas Resueltos PDFDavid Martin Espinoza GonzalezÎncă nu există evaluări
- Ejercicos QcaDocument315 paginiEjercicos QcaJosé Ulloa Chiroque100% (1)
- F-Modelo de Examen Parcial PDFDocument2 paginiF-Modelo de Examen Parcial PDFDavid Martin Espinoza GonzalezÎncă nu există evaluări
- Simulacion de Sistemas Productivos Con Arena - Aldo Fábregas Ariza - Google LibrosDocument1 paginăSimulacion de Sistemas Productivos Con Arena - Aldo Fábregas Ariza - Google LibrosMarco Vinicio Gavidia Villacres100% (2)
- Presentacion Estudios MulticlientesDocument162 paginiPresentacion Estudios MulticlientesjessicasikaÎncă nu există evaluări
- Gas Natural EjerciciosDocument74 paginiGas Natural EjerciciosDavid Martin Espinoza GonzalezÎncă nu există evaluări
- Usa Rápidamente El Rostro Del Diablo NOVELA - ARCO 6Document43 paginiUsa Rápidamente El Rostro Del Diablo NOVELA - ARCO 6RachellÎncă nu există evaluări
- (EHJR) Rakudai Kishi No Eiyuutan - Volumen 01Document222 pagini(EHJR) Rakudai Kishi No Eiyuutan - Volumen 01Pablo Andree Bautista lajoÎncă nu există evaluări
- El Poder PersonalDocument5 paginiEl Poder PersonalAntonio AlvarezÎncă nu există evaluări
- Guia Practica 4Document2 paginiGuia Practica 4ivanna tenesacaÎncă nu există evaluări
- Método Sinérgico de Localización de PlantasDocument4 paginiMétodo Sinérgico de Localización de PlantasAlexandra Shabel Diaz MamaniÎncă nu există evaluări
- Ejercicios de Tipos de Probabilidades-EstadísticaDocument11 paginiEjercicios de Tipos de Probabilidades-Estadísticaedisontigasi0% (1)
- INTRODUCCIÓN PenduloDocument14 paginiINTRODUCCIÓN PenduloDaniel Riscanevo75% (4)
- Perforacion en Bolivia Del PetroleoDocument17 paginiPerforacion en Bolivia Del PetroleoCristianÎncă nu există evaluări
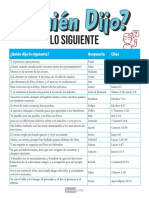
- Quien Dijo SiguienteDocument1 paginăQuien Dijo SiguienteHomer Edy Armas Calixto100% (1)
- Lectura de Derecho de SucesionesDocument11 paginiLectura de Derecho de SucesionesPablito RomeroÎncă nu există evaluări
- La Capitania General de VenezuelaDocument4 paginiLa Capitania General de VenezuelajuanÎncă nu există evaluări
- Escala Estimativa Ud4, A22Document2 paginiEscala Estimativa Ud4, A22Joseph GonzalezÎncă nu există evaluări
- El Conocimiento Como Actividad Humana.Document7 paginiEl Conocimiento Como Actividad Humana.Gustavo CárdenasÎncă nu există evaluări
- ABSUELTODocument14 paginiABSUELTOJOSEÎncă nu există evaluări
- Capitulo 6 de Pablo Hoff2Document7 paginiCapitulo 6 de Pablo Hoff2alexgrra.unaÎncă nu există evaluări
- GUIA DOCENTE - Patologia de La Sangre y La Hematopoyesis - 4 - CURSO 2012-13Document21 paginiGUIA DOCENTE - Patologia de La Sangre y La Hematopoyesis - 4 - CURSO 2012-13Ednner Sneyder Castillo VelandiaÎncă nu există evaluări
- Ficha 02 - AnalisisDocument5 paginiFicha 02 - AnalisisAlbert EinsteinÎncă nu există evaluări
- Jose Salazar Inglés 4C B2Document2 paginiJose Salazar Inglés 4C B2jose miguel salazar sosaÎncă nu există evaluări
- Partidos PoliticosDocument3 paginiPartidos Politicosyaz hdzÎncă nu există evaluări
- Valores PsDocument5 paginiValores PsMercedesRaquelVelasquezÎncă nu există evaluări