S-ar putea să vă placă și
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2De la EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Încă nu există evaluări
- AIN1501 Study ContentDocument211 paginiAIN1501 Study ContentNaadhirah LoonatÎncă nu există evaluări
- LCD Panel VoltageDocument10 paginiLCD Panel VoltageqwertÎncă nu există evaluări
- Zero Crossing Detector and Window DetectorDocument7 paginiZero Crossing Detector and Window DetectorTimoth Dev50% (2)
- 4020 Fire Alarm System System Troubleshooting Guide: 574-771 Rev. ADocument34 pagini4020 Fire Alarm System System Troubleshooting Guide: 574-771 Rev. AAnil Kumar0% (1)
- HDI 2000BP Rev 1 Op ManualDocument41 paginiHDI 2000BP Rev 1 Op ManualMitul PatelÎncă nu există evaluări
- Commissioning of DAVRDocument70 paginiCommissioning of DAVRPMG Bhuswal Project100% (1)
- Embedded System Question BankDocument12 paginiEmbedded System Question BankSanthosh KumarÎncă nu există evaluări
- Fanuc I/O Unit-Model A: Connection and Maintenance ManualDocument246 paginiFanuc I/O Unit-Model A: Connection and Maintenance Manualcamgz32Încă nu există evaluări
- Tsx17 TSX t407 Telemecanique User ManualDocument72 paginiTsx17 TSX t407 Telemecanique User ManualJose Eduardo Briceño0% (1)
- TTi TS Series Power Supplies ManualDocument27 paginiTTi TS Series Power Supplies Manualj.bycroft126Încă nu există evaluări
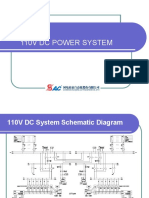
- Sac Power 1110 DCDocument24 paginiSac Power 1110 DCJepri MarpaungÎncă nu există evaluări
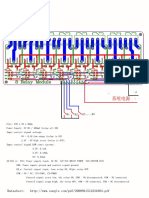
- DatashetDocument11 paginiDatashetRoberto VegaÎncă nu există evaluări
- How To Control and Monitor A C441 Motor Insight Via DeviceNetDocument7 paginiHow To Control and Monitor A C441 Motor Insight Via DeviceNetcarlosÎncă nu există evaluări
- Flip Flop D 74ls74Document13 paginiFlip Flop D 74ls74Kath EmiÎncă nu există evaluări
- Lab 7 PLC With Stepper MotorDocument3 paginiLab 7 PLC With Stepper Motorgedeus8072Încă nu există evaluări
- MN Comp6e 03Document19 paginiMN Comp6e 03baksof3843Încă nu există evaluări
- Upute Ems20Document69 paginiUpute Ems20ammelinoÎncă nu există evaluări
- P 22 V 10Document34 paginiP 22 V 10roozbehxoxÎncă nu există evaluări
- Digital / Analog Trainer: Elenco Electronics, IncDocument16 paginiDigital / Analog Trainer: Elenco Electronics, Incnes2130Încă nu există evaluări
- MM5387AADocument6 paginiMM5387AApicky13Încă nu există evaluări
- Lab 2 JFETtransfercurveDocument4 paginiLab 2 JFETtransfercurveJoca FerÎncă nu există evaluări
- Monitoring Function BlocksDocument9 paginiMonitoring Function Blocksganeshapec8Încă nu există evaluări
- Arduino Project Burglar Zone Input TesterDocument4 paginiArduino Project Burglar Zone Input TesterCezary Jan JaronczykÎncă nu există evaluări
- 11 Level Inverter With Less Number of Switches: Mubashrasazda KhanDocument10 pagini11 Level Inverter With Less Number of Switches: Mubashrasazda Khanajay rÎncă nu există evaluări
- 3UG32072B Datasheet enDocument26 pagini3UG32072B Datasheet enMario ManuelÎncă nu există evaluări
- Lab7 VerilogDocument7 paginiLab7 Veriloghanhtinhkila76017Încă nu există evaluări
- Power Electronics Lab MannualDocument12 paginiPower Electronics Lab MannualAnupam Adarsh KumarÎncă nu există evaluări
- Operation Manual: CMCP575-XXX-XXX Speed TransmitterDocument8 paginiOperation Manual: CMCP575-XXX-XXX Speed TransmitterYeral PobleteÎncă nu există evaluări
- 960 0079 01 SignalFire Cathodic Protection Monitor Node Manual Rev 1 - 0Document8 pagini960 0079 01 SignalFire Cathodic Protection Monitor Node Manual Rev 1 - 0Automatización AITÎncă nu există evaluări
- Creating A PWM Signal Using A PIC 16F84Document5 paginiCreating A PWM Signal Using A PIC 16F84saadettin100% (2)
- MM74C925 - MM74C926 4-Digit Counters With Multiplexed 7-Segment Output DriversDocument8 paginiMM74C925 - MM74C926 4-Digit Counters With Multiplexed 7-Segment Output Driversmasoudamante100% (2)
- Solcon MV Thyristor Power Controller SpecificationsDocument55 paginiSolcon MV Thyristor Power Controller SpecificationsSaidi CalalaÎncă nu există evaluări
- Schmitt TriggerDocument3 paginiSchmitt Triggerafzal ansariÎncă nu există evaluări
- HAT560N Series (HAT560N /HAT560NB) Ats ControllerDocument10 paginiHAT560N Series (HAT560N /HAT560NB) Ats ControllerAye ThetMonÎncă nu există evaluări
- H 0 Rtfa 1807 IV 00Document2 paginiH 0 Rtfa 1807 IV 00Quân BùiÎncă nu există evaluări
- Quantum Technology Instruction Manual For Model HVP-51-DIFF-5Document94 paginiQuantum Technology Instruction Manual For Model HVP-51-DIFF-5kleephÎncă nu există evaluări
- VC-2 Dual Solenoid Valve ControllerDocument3 paginiVC-2 Dual Solenoid Valve ControllersilverrianÎncă nu există evaluări
- DocumentationDocument8 paginiDocumentationmmÎncă nu există evaluări
- CD4541 PDFDocument7 paginiCD4541 PDFtutesamÎncă nu există evaluări
- 2-Wire Serial Eeprom: FeaturesDocument11 pagini2-Wire Serial Eeprom: FeaturesRomel Ranin CalangÎncă nu există evaluări
- 2-Wire Serial Eeprom: FeaturesDocument10 pagini2-Wire Serial Eeprom: FeaturesPablo Diego Cecere CasadoÎncă nu există evaluări
- New EhtcDocument4 paginiNew EhtcRamakrishnan NatarajanÎncă nu există evaluări
- Hdben21Document24 paginiHdben21mick armenagÎncă nu există evaluări
- Laboratory Manual Course Code:Ece 201Document41 paginiLaboratory Manual Course Code:Ece 201Er Sacchu SrivastavaÎncă nu există evaluări
- Keyence AS - 64893 - CV-X - IO - SG - 369GB - GB - WW - 1084-1Document24 paginiKeyence AS - 64893 - CV-X - IO - SG - 369GB - GB - WW - 1084-1Gabriel Martinez MessnerÎncă nu există evaluări
- PD9001Document13 paginiPD9001Sher BahadarÎncă nu există evaluări
- LM3622Document9 paginiLM3622kloppigÎncă nu există evaluări
- SKU163994 ZXY6020S User Manual Power Supply 0 60 VDocument15 paginiSKU163994 ZXY6020S User Manual Power Supply 0 60 VAlexÎncă nu există evaluări
- 2 LJZ 2 - Flow Monitoring DeviceDocument6 pagini2 LJZ 2 - Flow Monitoring DeviceRenato Nato AlvarezÎncă nu există evaluări
- ADE Cycle-IDocument18 paginiADE Cycle-InadeemÎncă nu există evaluări
- Eim377 Ad9850 Signal Generator Module v01Document10 paginiEim377 Ad9850 Signal Generator Module v01Frederico Ribeiro BarnabéÎncă nu există evaluări
- Application Note: Cs5531/32/33/34 Frequently Asked QuestionsDocument14 paginiApplication Note: Cs5531/32/33/34 Frequently Asked Questionssalam87Încă nu există evaluări
- List of Experiments: Ic Applications Lab Minimum Twelve Experiments To Be ConductedDocument6 paginiList of Experiments: Ic Applications Lab Minimum Twelve Experiments To Be ConductedAmy OliverÎncă nu există evaluări
- DCL400Document2 paginiDCL400taleb 6269Încă nu există evaluări
- MM54C192/MM74C192 Synchronous 4-Bit Up/Down Decade Counter MM54C193/MM74C193 Synchronous 4-Bit Up/Down Binary CounterDocument6 paginiMM54C192/MM74C192 Synchronous 4-Bit Up/Down Decade Counter MM54C193/MM74C193 Synchronous 4-Bit Up/Down Binary CounterIván MartínezÎncă nu există evaluări
- Mod RelayDocument1 paginăMod RelaySkvkÎncă nu există evaluări
- Serial 8-Servo Controller: User's GuideDocument8 paginiSerial 8-Servo Controller: User's GuideMohamad GhazaliÎncă nu există evaluări
- Digital / Analog Trainer: ElencoDocument16 paginiDigital / Analog Trainer: ElencoRichard AraujoÎncă nu există evaluări
- High Current Switching Regulators: DescriptionDocument22 paginiHigh Current Switching Regulators: DescriptionClaudio MartinsÎncă nu există evaluări
- Microelectronic Systems N2 Checkbook: The Checkbook SeriesDe la EverandMicroelectronic Systems N2 Checkbook: The Checkbook SeriesÎncă nu există evaluări
- REG615 5.0 FP1 CN Application ManualDocument156 paginiREG615 5.0 FP1 CN Application Manualalex pardoÎncă nu există evaluări
- 3BSE020924-600 A en S800 IO Modules and Termination UnitsDocument698 pagini3BSE020924-600 A en S800 IO Modules and Termination UnitsSakthi Sekar Cbi100% (1)
- Online Crime Management SystemDocument62 paginiOnline Crime Management SystemAshutosh mahaleÎncă nu există evaluări
- Eogui ManualDocument17 paginiEogui ManualAbhinav GuptaÎncă nu există evaluări
- Digital Audio Speaker Processor K-SP 224: Kennell SasDocument2 paginiDigital Audio Speaker Processor K-SP 224: Kennell SasTD-Tato DamatoÎncă nu există evaluări
- ST20-GP6: Gps ProcessorDocument124 paginiST20-GP6: Gps ProcessorDenis PrivatÎncă nu există evaluări
- VPutility UserGuide v1.2Document49 paginiVPutility UserGuide v1.2ageevsn100% (1)
- 1397639790456958Document1 pagină1397639790456958Gunanidhi SharmaÎncă nu există evaluări
- NV XVR5104H XDocument1 paginăNV XVR5104H XManuel RufastoÎncă nu există evaluări
- Sulsim 6 Brochure PRCDocument3 paginiSulsim 6 Brochure PRCIman AkbariÎncă nu există evaluări
- Data Sheet: FeaturesDocument17 paginiData Sheet: FeatureschristianÎncă nu există evaluări
- PID TIA Portal 5Document110 paginiPID TIA Portal 5Yogi KipiantoÎncă nu există evaluări
- 1 Intro To Computer ArchitectureDocument5 pagini1 Intro To Computer Architecturejojojohnson7410Încă nu există evaluări
- Nortel Meridian 1 Option 11cDocument546 paginiNortel Meridian 1 Option 11cRicardo Díaz100% (1)
- Blackfin Audio Extender Man Rev.2.2Document48 paginiBlackfin Audio Extender Man Rev.2.2groenedraakÎncă nu există evaluări
- Itsc 6114/8114 Algorithms and Data Structures: - Your Filename Should Be Isort. (Case Sensitive)Document2 paginiItsc 6114/8114 Algorithms and Data Structures: - Your Filename Should Be Isort. (Case Sensitive)rajÎncă nu există evaluări
- ProgsDocument22 paginiProgskepler1729Încă nu există evaluări
- UML Case - Elevator Control System PDFDocument12 paginiUML Case - Elevator Control System PDFMohamad RidwanÎncă nu există evaluări
- Simulation and Implementation of PLC Based For Detecting Burned Potato Chips and Remove Using PLCSIM and HMIDocument6 paginiSimulation and Implementation of PLC Based For Detecting Burned Potato Chips and Remove Using PLCSIM and HMIEditor IJTSRDÎncă nu există evaluări
- Caracteristicas Mydaq NiDocument54 paginiCaracteristicas Mydaq NieeindustrialÎncă nu există evaluări
- 71000-901 A.4 Vertx Evo v1000 Inst Guide en PDFDocument25 pagini71000-901 A.4 Vertx Evo v1000 Inst Guide en PDFPraveen Kumar K NÎncă nu există evaluări
- SC V500 Operation Rev 500Document116 paginiSC V500 Operation Rev 500mato3848Încă nu există evaluări
- ڈوگر برادرز کی کتاب NTS Solved Answers Questions Updated Last Week PDFDocument178 paginiڈوگر برادرز کی کتاب NTS Solved Answers Questions Updated Last Week PDFMubasshar FarjadÎncă nu există evaluări
- FM Transmitter: Design Report Project Team: Dec06-01 ClientDocument37 paginiFM Transmitter: Design Report Project Team: Dec06-01 ClientRon Kirby Magdae CalabonÎncă nu există evaluări
- Section 13730 Security Access Part 1Document132 paginiSection 13730 Security Access Part 1jacksondcplÎncă nu există evaluări