S-ar putea să vă placă și
- Control of DC Motor Using Different Control StrategiesDe la EverandControl of DC Motor Using Different Control StrategiesÎncă nu există evaluări
- An Effective Approach To Enhance The Balancing Control in Bycycorobot Using The Soft Computing TechniquesDocument19 paginiAn Effective Approach To Enhance The Balancing Control in Bycycorobot Using The Soft Computing TechniquesIAES International Journal of Robotics and AutomationÎncă nu există evaluări
- Kinematic Analysis and Control Algorithm For The BallbotDocument8 paginiKinematic Analysis and Control Algorithm For The BallbotThanh TrungfdrÎncă nu există evaluări
- Dynamic Model-Based Adaptive Posture Controller For Robotic WheelchairsDocument9 paginiDynamic Model-Based Adaptive Posture Controller For Robotic WheelchairsYassine RabhiÎncă nu există evaluări
- Hybrid Learning Control Schemes With Input Shaping of A Exible Manipulator SystemDocument11 paginiHybrid Learning Control Schemes With Input Shaping of A Exible Manipulator Systemk_vinothkumar75Încă nu există evaluări
- Balancing Control of Two Wheel Bicycle Problems - Ngoc Kien VuDocument12 paginiBalancing Control of Two Wheel Bicycle Problems - Ngoc Kien Vunurcandra1996Încă nu există evaluări
- Self Balancing Two-Wheel LocomotiveDocument55 paginiSelf Balancing Two-Wheel LocomotiveSujay PawarÎncă nu există evaluări
- Project Segway 3 WheelDocument26 paginiProject Segway 3 WheelMohit ChetwaniÎncă nu există evaluări
- Advanced Controls MidDocument7 paginiAdvanced Controls Midbot10Încă nu există evaluări
- Controlstrategies Automotivesuspension Bookchapter Springer Kashem2017Document14 paginiControlstrategies Automotivesuspension Bookchapter Springer Kashem2017Thanh Phong PhamÎncă nu există evaluări
- Robust Adaptive Backstepping Control of Inverted Pendulum On Cart SystemDocument14 paginiRobust Adaptive Backstepping Control of Inverted Pendulum On Cart SystemirqoviÎncă nu există evaluări
- Research Article: A Two-Wheeled Self-Balancing Robot With The Fuzzy PD Control MethodDocument14 paginiResearch Article: A Two-Wheeled Self-Balancing Robot With The Fuzzy PD Control MethodMurat Yasar ERTASÎncă nu există evaluări
- 2004MultibodySystemsDynamics 114 - 365 394ControlofmultibodysystemsPAntos PDFDocument31 pagini2004MultibodySystemsDynamics 114 - 365 394ControlofmultibodysystemsPAntos PDFVAIBHAV DHAR DWIVEDIÎncă nu există evaluări
- Robot Manipulator Guidance ControlDocument19 paginiRobot Manipulator Guidance ControlWilliam VenegasÎncă nu există evaluări
- Tracking Control 3 Omni Wheel ModelDocument15 paginiTracking Control 3 Omni Wheel ModelRangga NaufalÎncă nu există evaluări
- Autopilot Design of Tilt Rotor UAV Using Particle Swarm Optimization MethodDocument5 paginiAutopilot Design of Tilt Rotor UAV Using Particle Swarm Optimization MethodMohammad Reza MadadiÎncă nu există evaluări
- Advanced Mechatronic Design Using A Multi-Objective Genetic Algorithm Optimization of A Motor-Driven Four-Bar SystemDocument12 paginiAdvanced Mechatronic Design Using A Multi-Objective Genetic Algorithm Optimization of A Motor-Driven Four-Bar SystemMauricio VillalobosÎncă nu există evaluări
- Asi 03 00024 v2 PDFDocument19 paginiAsi 03 00024 v2 PDFccÎncă nu există evaluări
- Inverted Pendulum With Moving Reference For Benchmarking Control Systems PerformanceDocument5 paginiInverted Pendulum With Moving Reference For Benchmarking Control Systems PerformanceAnonymous LU3Dz3TKtVÎncă nu există evaluări
- Mathematical Modeling and Simulation of Quadcopter-UAV Using PID ControllerDocument8 paginiMathematical Modeling and Simulation of Quadcopter-UAV Using PID Controllerأبو هشامÎncă nu există evaluări
- Commande San Modele Robot A 2dllDocument18 paginiCommande San Modele Robot A 2dllElleuch DorsafÎncă nu există evaluări
- Kadis ACRA 2010 FinalDocument9 paginiKadis ACRA 2010 FinalHua Hidari YangÎncă nu există evaluări
- Analisis MAtematico ABSDocument78 paginiAnalisis MAtematico ABSCristian Caguana RomeroÎncă nu există evaluări
- Evolvable Mechanics Hardware Tools For Evolutionary RoboticsDocument7 paginiEvolvable Mechanics Hardware Tools For Evolutionary Roboticsdinu petreÎncă nu există evaluări
- Icmere2017 Pi 294Document5 paginiIcmere2017 Pi 294hasanÎncă nu există evaluări
- Optimal Fuzzy Self-Tuning of PI Controller Using Genetic Algorithm For Induction Motor Speed ControlDocument2 paginiOptimal Fuzzy Self-Tuning of PI Controller Using Genetic Algorithm For Induction Motor Speed ControlSALEM234Încă nu există evaluări
- Onofacabininaship, H, Self Balancing Robots, For Future Transport Systems Like S and JDocument20 paginiOnofacabininaship, H, Self Balancing Robots, For Future Transport Systems Like S and JGirish JoshiÎncă nu există evaluări
- 4.5 Literature SurveyDocument2 pagini4.5 Literature Surveyrajus00077 rajus00077Încă nu există evaluări
- Implementation of Inverted Pendulum Control, Plunks On Miscellaneous TacticsDocument6 paginiImplementation of Inverted Pendulum Control, Plunks On Miscellaneous TacticsirqoviÎncă nu există evaluări
- Binh2019 Article AnAdaptiveBacksteppingTrajectoDocument9 paginiBinh2019 Article AnAdaptiveBacksteppingTrajectoTeresaPeraltaCalvilloÎncă nu există evaluări
- Ciac2015 HJRDocument11 paginiCiac2015 HJRChiha WissemÎncă nu există evaluări
- Neural-Adaptive Output Feedback Control of A Class of Transportation Vehicles Based On Wheeled Inverted Pendulum ModelsDocument9 paginiNeural-Adaptive Output Feedback Control of A Class of Transportation Vehicles Based On Wheeled Inverted Pendulum ModelsKuldeep KumarÎncă nu există evaluări
- Dynamics and Control of A Robotic Arm Having Four LinksDocument13 paginiDynamics and Control of A Robotic Arm Having Four LinksHưng Nguyễn Trần NhựtÎncă nu există evaluări
- A Closed Loop Inverse Kinematics Solver Intended For Offline Calculation Optimized With GADocument13 paginiA Closed Loop Inverse Kinematics Solver Intended For Offline Calculation Optimized With GASatyajit Halder me18s052Încă nu există evaluări
- Robust Adaptive Controller For A Tractor-TrailerDocument11 paginiRobust Adaptive Controller For A Tractor-TrailerHa QuyenÎncă nu există evaluări
- Fuzzy Logic Speed ControlDocument12 paginiFuzzy Logic Speed ControlRasheed AhamedÎncă nu există evaluări
- Trajectory Planning Optimization and Control of A 2009Document14 paginiTrajectory Planning Optimization and Control of A 2009Bilal OraikÎncă nu există evaluări
- 11 Chapter 02 PDFDocument28 pagini11 Chapter 02 PDFjoel perieraÎncă nu există evaluări
- Ica20110200001 94894672Document8 paginiIca20110200001 94894672Anggara T NugrahaÎncă nu există evaluări
- A New Variable Structure PID-Controller Design For Robot ManipulatorsDocument9 paginiA New Variable Structure PID-Controller Design For Robot ManipulatorsMehdi DalirÎncă nu există evaluări
- Segway TrajectoryDocument6 paginiSegway Trajectory4nt0n3g0Încă nu există evaluări
- Parameters Uncertainty Analysis of Posture Control of A Four-Wheel-Legged Robot With Series Slow Active Suspension SystemDocument20 paginiParameters Uncertainty Analysis of Posture Control of A Four-Wheel-Legged Robot With Series Slow Active Suspension Systemlutfil hadiÎncă nu există evaluări
- Sliding Mode Control PPT FinalDocument28 paginiSliding Mode Control PPT FinalBharatValaÎncă nu există evaluări
- Position Control of A Ball Balancer System Using Particle Swarm Optimization BAT and Flower Pollination AlgorithmDocument17 paginiPosition Control of A Ball Balancer System Using Particle Swarm Optimization BAT and Flower Pollination AlgorithmdangquanginhaÎncă nu există evaluări
- Modeling and Control of Ball and Beam System Using Model Based and Non-Model Based Control ApproachesDocument22 paginiModeling and Control of Ball and Beam System Using Model Based and Non-Model Based Control ApproachesAbolfazl_mohebbiÎncă nu există evaluări
- A Dual Quaternion Linear-Quadratic Optimal Controller For Trajectory TrackingDocument6 paginiA Dual Quaternion Linear-Quadratic Optimal Controller For Trajectory TrackingGerardo HernándezÎncă nu există evaluări
- Quadrupedal Robots Whole-Body Motion Control BasedDocument17 paginiQuadrupedal Robots Whole-Body Motion Control BasedluukverstegenÎncă nu există evaluări
- PHD ACODocument13 paginiPHD ACOPrasadYadavÎncă nu există evaluări
- Vivek Adap SuspDocument21 paginiVivek Adap SuspMohammed Asif NÎncă nu există evaluări
- Mechanical Design and Optimal Control of HumanoidDocument12 paginiMechanical Design and Optimal Control of HumanoidDavi AssunçãoÎncă nu există evaluări
- Suspension SystemsDocument23 paginiSuspension SystemsEngr Mansoor AhmadÎncă nu există evaluări
- Advanced Model Based Control of A 6DOF HDocument11 paginiAdvanced Model Based Control of A 6DOF HQaim RazaÎncă nu există evaluări
- 1 - 77 - IJCAS - v.7 - n.1 - pp.113-122 - 2009 - Tamba-Hong-Hong (LIT)Document10 pagini1 - 77 - IJCAS - v.7 - n.1 - pp.113-122 - 2009 - Tamba-Hong-Hong (LIT)Mudassir JafferÎncă nu există evaluări
- Preprint NNPIDDocument12 paginiPreprint NNPIDManh Nguyen TienÎncă nu există evaluări
- Yoke MechanismDocument25 paginiYoke MechanismNethaji Tr100% (1)
- PID-LQR Combined Linear Controller For Balancing Ballbot: Simulation and ExperimentDocument7 paginiPID-LQR Combined Linear Controller For Balancing Ballbot: Simulation and ExperimentBùi Quốc DuyÎncă nu există evaluări
- Centrifugal Force Compensation of A Two-Wheeled Balancing RobotDocument6 paginiCentrifugal Force Compensation of A Two-Wheeled Balancing RobotAs'ad Syamsul ArifinÎncă nu există evaluări
- Biped Robot Push Detection and RecoveryDocument6 paginiBiped Robot Push Detection and RecoveryDr Awais YasinÎncă nu există evaluări
- IJSTM17451382214600Document14 paginiIJSTM17451382214600Viraj GaonkarÎncă nu există evaluări
- Cercetari Privind Echilibrarea Pendulului Invers Research Concerning The Equilibration of The Inverted PendulumDocument8 paginiCercetari Privind Echilibrarea Pendulului Invers Research Concerning The Equilibration of The Inverted PendulumFanica ScarlatÎncă nu există evaluări
- PTSP 2 Marks Questions Unit IDocument2 paginiPTSP 2 Marks Questions Unit IramanaÎncă nu există evaluări
- In The Name of Allah The Most Beneficent The Most Merciful: Subject: Data Structures & AlgorithmsDocument52 paginiIn The Name of Allah The Most Beneficent The Most Merciful: Subject: Data Structures & AlgorithmsAbdullah JuttÎncă nu există evaluări
- Lecture 0Document33 paginiLecture 0Devyansh GuptaÎncă nu există evaluări
- Recursive Least-Squares (RLS) Adaptive FiltersDocument21 paginiRecursive Least-Squares (RLS) Adaptive FiltersRathva brijesh r.Încă nu există evaluări
- DBMS (Unit - 1)Document17 paginiDBMS (Unit - 1)divyanshi kansalÎncă nu există evaluări
- Data MiningDocument15 paginiData Miningसुजन कार्कीÎncă nu există evaluări
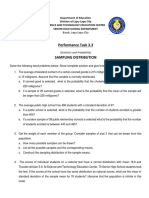
- Performance Task - Q3-3Document2 paginiPerformance Task - Q3-3Atasha Nicole G. BahandeÎncă nu există evaluări
- Lab Manual DC - Exp 9Document3 paginiLab Manual DC - Exp 9Diya ShahÎncă nu există evaluări
- Transform Operator Random Generator Delimiter Based Encryption Standard (TORDES)Document4 paginiTransform Operator Random Generator Delimiter Based Encryption Standard (TORDES)Ajay ChaudharyÎncă nu există evaluări
- ESE 2019 Mains Electronics & Telecommunication Engineering Conventional Paper II Previous Conventional Questions With Solutions PDFDocument29 paginiESE 2019 Mains Electronics & Telecommunication Engineering Conventional Paper II Previous Conventional Questions With Solutions PDFRanjanÎncă nu există evaluări
- Chapter IDocument84 paginiChapter ISurbhi Pareek100% (1)
- Lesson 4Document18 paginiLesson 4tariqravianÎncă nu există evaluări
- Greedy AlgorithmsDocument110 paginiGreedy AlgorithmsMITALBAHEN DHOLAKIYAÎncă nu există evaluări
- Unit 3.4 Hashing TechniquesDocument7 paginiUnit 3.4 Hashing TechniquesAditya SinghÎncă nu există evaluări
- Artificial Inteligency - PresentationDocument34 paginiArtificial Inteligency - PresentationandyKNababanÎncă nu există evaluări
- LASSO Regression OutputDocument5 paginiLASSO Regression OutputZACHARIAS PETSASÎncă nu există evaluări
- A Modern Approach For Sign Language Interpretation Using CNNDocument15 paginiA Modern Approach For Sign Language Interpretation Using CNNPias PaulÎncă nu există evaluări
- ME411 Fall 2012 Lab 3-1Document2 paginiME411 Fall 2012 Lab 3-1Peter FinzellÎncă nu există evaluări
- 350 - 10315 - CB519 - 2019 - 1 - 1 - 1 - PERT and Range EstimateDocument29 pagini350 - 10315 - CB519 - 2019 - 1 - 1 - 1 - PERT and Range EstimateRenata PessoaÎncă nu există evaluări
- CPM Time Analysis FloatsDocument23 paginiCPM Time Analysis FloatsHiremathkhushiÎncă nu există evaluări
- Hill Climbing TechniquesDocument10 paginiHill Climbing TechniquesfarheenÎncă nu există evaluări
- Bits Zg553 Real Time Systems L-3 KGKDocument28 paginiBits Zg553 Real Time Systems L-3 KGKAkil MÎncă nu există evaluări
- Syl MSC Physics 2212Document53 paginiSyl MSC Physics 2212Aaron DmcÎncă nu există evaluări
- Quantum Data Compression, Quantum Information Generation, and The Density-Matrix Renormalization Group MethodDocument8 paginiQuantum Data Compression, Quantum Information Generation, and The Density-Matrix Renormalization Group MethodLathish KumarÎncă nu există evaluări
- DBMS SyllabusDocument4 paginiDBMS SyllabusExam helperÎncă nu există evaluări
- Control Systems For Robots: Prof. Robert Marmelstein CPSC 527 - Robotics Spring 2010Document40 paginiControl Systems For Robots: Prof. Robert Marmelstein CPSC 527 - Robotics Spring 2010Ritesh SinghÎncă nu există evaluări
- Chapter 03 Us 7eDocument46 paginiChapter 03 Us 7eMuhammad SaefiÎncă nu există evaluări
- Artificial Intelligence: Adversarial SearchDocument62 paginiArtificial Intelligence: Adversarial SearchKhawir MahmoodÎncă nu există evaluări
- Section 12Document8 paginiSection 12Lau Yong KingÎncă nu există evaluări
- Chapter 17: Two-Port and Three-Port NetworksDocument34 paginiChapter 17: Two-Port and Three-Port NetworksRodrigo QuinterosÎncă nu există evaluări
- Fire on the Horizon: The Untold Story of the Gulf Oil DisasterDe la EverandFire on the Horizon: The Untold Story of the Gulf Oil DisasterÎncă nu există evaluări
- The Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialDe la EverandThe Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialÎncă nu există evaluări
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesDe la EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesEvaluare: 4.5 din 5 stele4.5/5 (21)
- Shorting the Grid: The Hidden Fragility of Our Electric GridDe la EverandShorting the Grid: The Hidden Fragility of Our Electric GridEvaluare: 4.5 din 5 stele4.5/5 (2)
- Solar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsDe la EverandSolar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsEvaluare: 4.5 din 5 stele4.5/5 (2)
- Air Cooled Heat Exchanger Handbook: Fundamentals, Calculations, Design and Q&ADe la EverandAir Cooled Heat Exchanger Handbook: Fundamentals, Calculations, Design and Q&AÎncă nu există evaluări
- A Practical Handbook for Drilling Fluids ProcessingDe la EverandA Practical Handbook for Drilling Fluids ProcessingÎncă nu există evaluări
- Electric Motors and Drives: Fundamentals, Types and ApplicationsDe la EverandElectric Motors and Drives: Fundamentals, Types and ApplicationsEvaluare: 4.5 din 5 stele4.5/5 (12)
- Handbook on Battery Energy Storage SystemDe la EverandHandbook on Battery Energy Storage SystemEvaluare: 4.5 din 5 stele4.5/5 (2)
- Introduction to Power System ProtectionDe la EverandIntroduction to Power System ProtectionEvaluare: 5 din 5 stele5/5 (1)
- Offshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsDe la EverandOffshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsÎncă nu există evaluări
- Idaho Falls: The Untold Story of America's First Nuclear AccidentDe la EverandIdaho Falls: The Untold Story of America's First Nuclear AccidentEvaluare: 4.5 din 5 stele4.5/5 (21)
- Well Integrity for Workovers and RecompletionsDe la EverandWell Integrity for Workovers and RecompletionsEvaluare: 5 din 5 stele5/5 (3)
- Heat Transfer Engineering: Fundamentals and TechniquesDe la EverandHeat Transfer Engineering: Fundamentals and TechniquesEvaluare: 4 din 5 stele4/5 (1)
- Flow Analysis for Hydrocarbon Pipeline EngineeringDe la EverandFlow Analysis for Hydrocarbon Pipeline EngineeringÎncă nu există evaluări
- Smart Power Distribution Systems: Control, Communication, and OptimizationDe la EverandSmart Power Distribution Systems: Control, Communication, and OptimizationÎncă nu există evaluări
- Live Off Grid: Escape The City, Learn How To Travel Intelligently Using Solar PowerDe la EverandLive Off Grid: Escape The City, Learn How To Travel Intelligently Using Solar PowerÎncă nu există evaluări
- Power Electronics Diploma Interview Q&A: Career GuideDe la EverandPower Electronics Diploma Interview Q&A: Career GuideÎncă nu există evaluări
- Photovoltaic Solar Energy: From Fundamentals to ApplicationsDe la EverandPhotovoltaic Solar Energy: From Fundamentals to ApplicationsÎncă nu există evaluări
- The New 3D Layout for Oil & Gas Offshore Projects: How to ensure successDe la EverandThe New 3D Layout for Oil & Gas Offshore Projects: How to ensure successEvaluare: 4.5 din 5 stele4.5/5 (3)
- The Grid: The Fraying Wires Between Americans and Our Energy FutureDe la EverandThe Grid: The Fraying Wires Between Americans and Our Energy FutureEvaluare: 3.5 din 5 stele3.5/5 (48)
- Asphaltene Deposition Control by Chemical Inhibitors: Theoretical and Practical ProspectsDe la EverandAsphaltene Deposition Control by Chemical Inhibitors: Theoretical and Practical ProspectsÎncă nu există evaluări
- The Permaculture City: Regenerative Design for Urban, Suburban, and Town ResilienceDe la EverandThe Permaculture City: Regenerative Design for Urban, Suburban, and Town ResilienceÎncă nu există evaluări
- A Pathway to Decarbonise the Shipping Sector by 2050De la EverandA Pathway to Decarbonise the Shipping Sector by 2050Încă nu există evaluări
- An Introduction to Renewable Energy Sources : Environment Books for Kids | Children's Environment BooksDe la EverandAn Introduction to Renewable Energy Sources : Environment Books for Kids | Children's Environment BooksÎncă nu există evaluări
- Renewable Energy Sources - Wind, Solar and Hydro Energy Revised Edition : Environment Books for Kids | Children's Environment BooksDe la EverandRenewable Energy Sources - Wind, Solar and Hydro Energy Revised Edition : Environment Books for Kids | Children's Environment BooksÎncă nu există evaluări