S-ar putea să vă placă și
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Manual de Partes Motor Cummins Dongfeng A Gas Set 2010Document90 paginiManual de Partes Motor Cummins Dongfeng A Gas Set 2010Fernando Jorge Gomez SulcaÎncă nu există evaluări
- Configuring SNMP On ProteusDocument12 paginiConfiguring SNMP On ProteusAijaz MirzaÎncă nu există evaluări
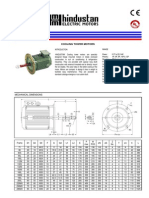
- Cooling Tower MotorDocument2 paginiCooling Tower MotorDipendraTomarÎncă nu există evaluări
- Master Ex L/S Digital Drive, 600 RPM, 115/230 VAC 0Document4 paginiMaster Ex L/S Digital Drive, 600 RPM, 115/230 VAC 0Mary Ann RondillaÎncă nu există evaluări
- Openstack Admin2 CL210 RHOSP10.1 en 2 20171006Document454 paginiOpenstack Admin2 CL210 RHOSP10.1 en 2 20171006Anderson MedinaÎncă nu există evaluări
- Power Electronics Question BankDocument3 paginiPower Electronics Question BankHarish SudhanÎncă nu există evaluări
- Panasonic Kx-ft982ls-984ls-988ls (Service Manual Repair)Document194 paginiPanasonic Kx-ft982ls-984ls-988ls (Service Manual Repair)servitecdj100% (2)
- 624 DS-NLC-wiring Diagram PDFDocument337 pagini624 DS-NLC-wiring Diagram PDFPopa Mihai100% (1)
- SSL Bochure enDocument17 paginiSSL Bochure enlineylosadagÎncă nu există evaluări
- MELFA Vision Instruction ManualDocument166 paginiMELFA Vision Instruction ManualJames JdfÎncă nu există evaluări
- @ WJC) 8@ $hack Instagram Account$ #2021# # (Hack InstaDocument4 pagini@ WJC) 8@ $hack Instagram Account$ #2021# # (Hack InstaMohamad ZaziliÎncă nu există evaluări
- Bugreport Lime - Global QKQ1.200830.002 2021 05 04 22 36 45 Dumpstate - Log 30853Document30 paginiBugreport Lime - Global QKQ1.200830.002 2021 05 04 22 36 45 Dumpstate - Log 30853Blackgouest 1043Încă nu există evaluări
- 3161 Governor: For Control of Engines and Steam TurbinesDocument4 pagini3161 Governor: For Control of Engines and Steam TurbinesWilliam's SalgadoÎncă nu există evaluări
- Summer ProjectDocument54 paginiSummer ProjectVikram MauryaÎncă nu există evaluări
- LC320W01 Sla1Document33 paginiLC320W01 Sla1Robert TocaÎncă nu există evaluări
- 310 - 010507 - 00001 - 01 - Technical Datasheet - Filterseparator SNP-PCH800.9Document8 pagini310 - 010507 - 00001 - 01 - Technical Datasheet - Filterseparator SNP-PCH800.9Goulet KostÎncă nu există evaluări
- Microwave - Pathloss IV TrainingDocument3 paginiMicrowave - Pathloss IV TrainingbantunnaÎncă nu există evaluări
- Easy Education Loan DetailsDocument3 paginiEasy Education Loan Detailsayusht7iÎncă nu există evaluări
- InfoSys Interview Questions For APIDocument3 paginiInfoSys Interview Questions For APIVijjuÎncă nu există evaluări
- Cli 72 PDFDocument604 paginiCli 72 PDFsudhakarÎncă nu există evaluări
- PD Smart PDFDocument2 paginiPD Smart PDFAriel Leandro Toro MuñozÎncă nu există evaluări
- Strategic Management Term PaperDocument18 paginiStrategic Management Term PaperOchena RajkonnaÎncă nu există evaluări
- PUMP MMTV Vertical Mixed Flow Multistage Pump With CanisterDocument3 paginiPUMP MMTV Vertical Mixed Flow Multistage Pump With Canisterarondaniel ocampoÎncă nu există evaluări
- 3DReshaper LeicaPresentation2014Document12 pagini3DReshaper LeicaPresentation2014cristicomanÎncă nu există evaluări
- HiLook Product Catalog 2019H2 PDFDocument58 paginiHiLook Product Catalog 2019H2 PDFCatur WijayaÎncă nu există evaluări
- 01-04 CDR ConsoleDocument56 pagini01-04 CDR ConsoleJUCARLCÎncă nu există evaluări
- Gambia ICT - Final - WebDocument77 paginiGambia ICT - Final - Webabey.mulugetaÎncă nu există evaluări
- Enterprise Hub DatasheetDocument4 paginiEnterprise Hub DatasheetSkooterÎncă nu există evaluări
- Sony Education Projectors 2019Document60 paginiSony Education Projectors 2019alanÎncă nu există evaluări
- Social Computing in The EnterpriseDocument17 paginiSocial Computing in The EnterpriseJustin Souter100% (2)