S-ar putea să vă placă și
- Class Diagram Exercises and SolutionsDocument5 paginiClass Diagram Exercises and SolutionsȜli Baydoun67% (24)
- Chapter 76 - Engine Controls: BHT-206L4-MM-9Document22 paginiChapter 76 - Engine Controls: BHT-206L4-MM-9Raisa RabeyaÎncă nu există evaluări
- Linear Functions and ExamplesDocument20 paginiLinear Functions and ExamplesStephen Velasco VillaruzÎncă nu există evaluări
- Binomial TheoremDocument24 paginiBinomial TheoremEdwin Okoampa BoaduÎncă nu există evaluări
- 4 - 7 Inverse Trig Functions LESSON NOTES PPDocument24 pagini4 - 7 Inverse Trig Functions LESSON NOTES PPRay CancinoÎncă nu există evaluări
- Stanford Linear System TheoryDocument431 paginiStanford Linear System TheoryNurhan Arslan100% (1)
- Ee263 Course ReaderDocument430 paginiEe263 Course ReadersurvinderpalÎncă nu există evaluări
- Variational CalculusDocument9 paginiVariational Calculusrahpooye313Încă nu există evaluări
- Control Systems: Dynamic ResponseDocument35 paginiControl Systems: Dynamic ResponseLovemore MakombeÎncă nu există evaluări
- ECE 209: Circuits and Electronics Laboratory: Math Background: ODE's, LTI Systems, and Laplace TransformsDocument4 paginiECE 209: Circuits and Electronics Laboratory: Math Background: ODE's, LTI Systems, and Laplace TransformsDavid TurnerÎncă nu există evaluări
- Lecture-2 Transfer FunctionDocument32 paginiLecture-2 Transfer FunctionMuneeb JawaidÎncă nu există evaluări
- Stability Analysis and Design of Fuzzy Control System PDFDocument18 paginiStability Analysis and Design of Fuzzy Control System PDFchiku PraharajÎncă nu există evaluări
- Lectures 5 - Frequency Response: K. J. ÅströmDocument11 paginiLectures 5 - Frequency Response: K. J. ÅströmEdutamÎncă nu există evaluări
- BBM 3A978 1 349 14944 5 2F1Document30 paginiBBM 3A978 1 349 14944 5 2F1farooqÎncă nu există evaluări
- LectureSeries 01 SHMDocument42 paginiLectureSeries 01 SHMSUBIR KUMAR DasÎncă nu există evaluări
- The Transfer Function The Transfer FunctionDocument7 paginiThe Transfer Function The Transfer FunctionTamires MarianeÎncă nu există evaluări
- Solution To Assignment 02Document6 paginiSolution To Assignment 02Alexander JolleyÎncă nu există evaluări
- 15.1 Dynamic OptimizationDocument32 pagini15.1 Dynamic OptimizationDaniel Lee Eisenberg JacobsÎncă nu există evaluări
- Mathematics GR 12Document1 paginăMathematics GR 12reacharunkÎncă nu există evaluări
- Signal Sapce RepresentationDocument41 paginiSignal Sapce RepresentationHarshitPalÎncă nu există evaluări
- Control Systems (CS) : Lecture-2 Transfer Function and Stability of LTI SystemsDocument35 paginiControl Systems (CS) : Lecture-2 Transfer Function and Stability of LTI SystemsAdil KhanÎncă nu există evaluări
- Linear Equations: - Linear Equations - Example: Polynomial Interpolation - Applications - Geometrical InterpretationDocument16 paginiLinear Equations: - Linear Equations - Example: Polynomial Interpolation - Applications - Geometrical InterpretationAbhishek PuriÎncă nu există evaluări
- Problems and SolutionsDocument13 paginiProblems and SolutionsJason ChiangÎncă nu există evaluări
- AC 1.1-MathDocument197 paginiAC 1.1-MathsatydevsinghnegiÎncă nu există evaluări
- Inequalities تاحجارتملا: InequalityDocument31 paginiInequalities تاحجارتملا: Inequalityمهند محسن مخيلفÎncă nu există evaluări
- Digital Signal Processing: Md. Manjurul Gani, Lecturer, EEE, CUETDocument33 paginiDigital Signal Processing: Md. Manjurul Gani, Lecturer, EEE, CUETJamil RofiÎncă nu există evaluări
- Eee Formula SheetDocument147 paginiEee Formula SheetNaveen Kumar100% (1)
- Inverse Trigonometric FunctionDocument15 paginiInverse Trigonometric FunctionMarx Lennin CabalticanÎncă nu există evaluări
- Cartesian Product, Relations, GraphsDocument27 paginiCartesian Product, Relations, Graphssunshine1795Încă nu există evaluări
- PChem HelpDocument27 paginiPChem HelpJillÎncă nu există evaluări
- Vector CalculusDocument108 paginiVector CalculusHani Barjok100% (1)
- Feedback Linearization Continued: Consider The Control Affine SISO SystemDocument23 paginiFeedback Linearization Continued: Consider The Control Affine SISO SystemJason ChiangÎncă nu există evaluări
- 263 HomeworkDocument153 pagini263 HomeworkHimanshu Saikia JÎncă nu există evaluări
- 13 Lin SysDocument39 pagini13 Lin SysRocisneRocisneÎncă nu există evaluări
- Calculus Ich 11Document31 paginiCalculus Ich 11nqnghia22Încă nu există evaluări
- Practical No 1Document18 paginiPractical No 1aditya naganeÎncă nu există evaluări
- Dy Dy Ax BX DX DXDocument35 paginiDy Dy Ax BX DX DXEduard Cosmin UngureanuÎncă nu există evaluări
- DSP II Math BackgroundDocument21 paginiDSP II Math BackgroundraviÎncă nu există evaluări
- Maths ProjectDocument26 paginiMaths Projectchaudhary.vansh2307Încă nu există evaluări
- Mathematical Techniques For Economic Analysis: Australian National University DR Reza HajargashtDocument60 paginiMathematical Techniques For Economic Analysis: Australian National University DR Reza HajargashtWu YichaoÎncă nu există evaluări
- Laplace TransformDocument98 paginiLaplace TransformMihail ColunÎncă nu există evaluări
- Topic 5Document23 paginiTopic 5NUR FADHLINA BINTI IZZUNIDDINÎncă nu există evaluări
- Lecture 2+modeling+ +Document60 paginiLecture 2+modeling+ +呀HongÎncă nu există evaluări
- Lecture 18 - Summary of The Course Preparations For Final ExaminationDocument19 paginiLecture 18 - Summary of The Course Preparations For Final ExaminationEdutamÎncă nu există evaluări
- System Dynamics and Control (ME422 - 03 - Spring - 2017) : Instructor: Prof. Ayman A. Aly El-NaggarDocument44 paginiSystem Dynamics and Control (ME422 - 03 - Spring - 2017) : Instructor: Prof. Ayman A. Aly El-NaggarBen AhmedÎncă nu există evaluări
- Review of Derivatives and OptimizationDocument6 paginiReview of Derivatives and Optimizationowaiskhan007Încă nu există evaluări
- 6 Circle AlgorithmDocument7 pagini6 Circle Algorithmrupak dangiÎncă nu există evaluări
- Lec4 CvITU02 WarpingDocument52 paginiLec4 CvITU02 Warpinganum_anhÎncă nu există evaluări
- Chapter 3 Study GuideDocument4 paginiChapter 3 Study GuideDanny Shea O'BrienÎncă nu există evaluări
- Differential Calculus: Pratik N ShethDocument37 paginiDifferential Calculus: Pratik N ShethgarvpaulÎncă nu există evaluări
- BezierDocument76 paginiBezierimmacoolcatÎncă nu există evaluări
- EC270 CH2 Math Lecture Slides WEBDocument37 paginiEC270 CH2 Math Lecture Slides WEBDavidÎncă nu există evaluări
- Lecture 7Document42 paginiLecture 7Andika Dwi RubyantoroÎncă nu există evaluări
- 4 FunctionsDocument76 pagini4 FunctionsKanokporn LeerungnavaratÎncă nu există evaluări
- Math Review: Sequences and LimitsDocument11 paginiMath Review: Sequences and LimitsMichael GarciaÎncă nu există evaluări
- Robert Sang - QMDocument136 paginiRobert Sang - QMVbsa BsaÎncă nu există evaluări
- Difference Equations in Normed Spaces: Stability and OscillationsDe la EverandDifference Equations in Normed Spaces: Stability and OscillationsÎncă nu există evaluări
- Transmutation and Operator Differential EquationsDe la EverandTransmutation and Operator Differential EquationsÎncă nu există evaluări
- Tables of Coulomb Wave Functions: Whittaker FunctionsDe la EverandTables of Coulomb Wave Functions: Whittaker FunctionsÎncă nu există evaluări
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)De la EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Încă nu există evaluări
- 1 - BOEHM - A View of 20th and 21st Century Software Engineering - 2006Document18 pagini1 - BOEHM - A View of 20th and 21st Century Software Engineering - 2006Kovags DiegoÎncă nu există evaluări
- Art:10.1007/s10791 008 9044 1Document21 paginiArt:10.1007/s10791 008 9044 1Pablo Valenzuela ToledoÎncă nu există evaluări
- An Olap Solution Using Mondrian and Jpivot: Sandro Bimonte Pascal WehrleDocument83 paginiAn Olap Solution Using Mondrian and Jpivot: Sandro Bimonte Pascal WehrlePablo Valenzuela ToledoÎncă nu există evaluări
- Galerkin MethodDocument18 paginiGalerkin MethodBurak Kılınç0% (1)
- Karel The Robot Learn JavaDocument39 paginiKarel The Robot Learn JavaBank100% (1)
- Workshop NotesDocument21 paginiWorkshop NotesPablo Valenzuela ToledoÎncă nu există evaluări
- Stakgold I. - Greens Functions and Boundary Value ProblemDocument654 paginiStakgold I. - Greens Functions and Boundary Value ProblemPablo Valenzuela Toledo100% (1)
- LicenseDocument7 paginiLicensePablo Valenzuela ToledoÎncă nu există evaluări
- Guia 5 ProbyestDocument10 paginiGuia 5 ProbyestPablo Valenzuela ToledoÎncă nu există evaluări
- Calculo Infinitesimal - Michael Spivak - Second EditionDocument920 paginiCalculo Infinitesimal - Michael Spivak - Second EditionPablo Valenzuela ToledoÎncă nu există evaluări
- Klee Minty 4Document2 paginiKlee Minty 4Pablo Valenzuela ToledoÎncă nu există evaluări
- American Manufacturing Aw1122bcd Parts BookDocument6 paginiAmerican Manufacturing Aw1122bcd Parts BookFelipe MalleaÎncă nu există evaluări
- SIL 17-TR-96 Transmission Oil Analysis Test RecommendationsDocument9 paginiSIL 17-TR-96 Transmission Oil Analysis Test RecommendationsBrian CareelÎncă nu există evaluări
- Documentación Del Sistema de PaletizadoDocument1.184 paginiDocumentación Del Sistema de PaletizadoAnalista Control de CalidadÎncă nu există evaluări
- LF AVA Castle CatalogDocument23 paginiLF AVA Castle CatalogAna MilicevicÎncă nu există evaluări
- NordicTrack GRT500Document25 paginiNordicTrack GRT500JTGilbertÎncă nu există evaluări
- 031 DG Pi05 0301 0Document28 pagini031 DG Pi05 0301 0powerclean ctgÎncă nu există evaluări
- PVC Stargrip Series 4000G2 NicolleDocument3 paginiPVC Stargrip Series 4000G2 NicolleJJ GSÎncă nu există evaluări
- Catalog ISO Soverreign Southon CrossDocument21 paginiCatalog ISO Soverreign Southon CrossAndi AlfianÎncă nu există evaluări
- 6850HYDRDocument4 pagini6850HYDRAhmed HakamÎncă nu există evaluări
- Troughed Slabs: (Ribbed Slabs With Integral Beams and Level Soffits, Troughed Flat Slabs, One-Way Joist Floors)Document2 paginiTroughed Slabs: (Ribbed Slabs With Integral Beams and Level Soffits, Troughed Flat Slabs, One-Way Joist Floors)renishkavukattÎncă nu există evaluări
- Stress and Strain 4th Class Power Engineering QuestionsDocument2 paginiStress and Strain 4th Class Power Engineering QuestionsCalvin Jude GoveiaÎncă nu există evaluări
- Ale Mite CatalogDocument134 paginiAle Mite CatalogxnbsxÎncă nu există evaluări
- t14 Tilt Up BracesDocument1 paginăt14 Tilt Up BracesDavid A. ArandaÎncă nu există evaluări
- Char-Lynn: Hydraulic MotorDocument8 paginiChar-Lynn: Hydraulic MotorRidha AbbassiÎncă nu există evaluări
- Mechanical Workshop Module - CompressedDocument78 paginiMechanical Workshop Module - CompressednanangasÎncă nu există evaluări
- Time Table For Summer 2024 Theory ExaminationDocument1 paginăTime Table For Summer 2024 Theory ExaminationSuraj 1212Încă nu există evaluări
- Reparacion Deutsch HD y DT Sehs9615Document17 paginiReparacion Deutsch HD y DT Sehs9615polish22Încă nu există evaluări
- Notes:-: LSB Temerity Infra PVT LTDDocument1 paginăNotes:-: LSB Temerity Infra PVT LTDV.m. RajanÎncă nu există evaluări
- DOSAX Belt FeederDocument17 paginiDOSAX Belt FeederAdnan NawazÎncă nu există evaluări
- Egd 001Document8 paginiEgd 001Anonymous rYZyQQot55Încă nu există evaluări
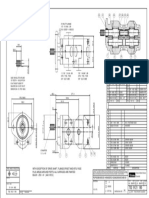
- PGP620B0360CE1H3MS6D5C-620A0290XB1D4B1B1: Third Angle ProjectionDocument1 paginăPGP620B0360CE1H3MS6D5C-620A0290XB1D4B1B1: Third Angle ProjectionMilton Quispe ChillitupaÎncă nu există evaluări
- Rotating Group Adjustment Instructions For Bosch Rexroth Hydraulic Pumps and Motors (3203, 4351, 5058, 5070)Document77 paginiRotating Group Adjustment Instructions For Bosch Rexroth Hydraulic Pumps and Motors (3203, 4351, 5058, 5070)César PérezÎncă nu există evaluări
- Full Version Manual: Silva Marine Compass 100B/H MaintenanceDocument1 paginăFull Version Manual: Silva Marine Compass 100B/H Maintenancesanginan100% (1)
- Condensadora TTB TraneDocument24 paginiCondensadora TTB TraneRoberto Reyes Lara100% (1)
- Method Statement For Installation of Fire Hose Cabinets, Hose Rack, Hose Reel & ExtinguishersDocument3 paginiMethod Statement For Installation of Fire Hose Cabinets, Hose Rack, Hose Reel & ExtinguishersDong VanraÎncă nu există evaluări
- ITL CatalogueDocument21 paginiITL CatalogueMicael FigueiraÎncă nu există evaluări
- Series 6000 - Models 6933, 6934 and 6935: FeaturesDocument12 paginiSeries 6000 - Models 6933, 6934 and 6935: Featuresفؤاد ابوزيدÎncă nu există evaluări
- Esp. VirabrequimDocument4 paginiEsp. VirabrequimflavioÎncă nu există evaluări
- 4418 Amot ValvesDocument4 pagini4418 Amot ValvesBernardo Amaya DojaqueÎncă nu există evaluări