S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Guidelines in Research Proposal WritingDocument19 paginiGuidelines in Research Proposal WritingMark RelloresÎncă nu există evaluări
- HRSGDocument21 paginiHRSGrabia2090Încă nu există evaluări
- Starbucks Delivering Customer Service Case Solution PDFDocument2 paginiStarbucks Delivering Customer Service Case Solution PDFRavia SharmaÎncă nu există evaluări
- Encryption LessonDocument2 paginiEncryption LessonKelly LougheedÎncă nu există evaluări
- Dissertation Sample CommerceDocument4 paginiDissertation Sample CommerceBuyPapersOnlineForCollegeCanada100% (1)
- M6 FORMATIVE3 VHDL Behavioral Programming 1Document14 paginiM6 FORMATIVE3 VHDL Behavioral Programming 1Allen Ray LedesmaÎncă nu există evaluări
- Noor Hafifi Bin Jalal: Operating Code 1: Demand ForecastDocument47 paginiNoor Hafifi Bin Jalal: Operating Code 1: Demand ForecastGopalakrishnan SekharanÎncă nu există evaluări
- Ruling The CountrysideDocument9 paginiRuling The Countrysiderajesh duaÎncă nu există evaluări
- Bizagi Podcast TranscriptDocument6 paginiBizagi Podcast TranscriptHortencia RodriguezÎncă nu există evaluări
- Assignment 1: Unit 3 - Week 1Document80 paginiAssignment 1: Unit 3 - Week 1sathiyan gsÎncă nu există evaluări
- Ariando Purba: Nov 2017-: CV. Mulia Abadi (Knitto Textiles) - Present System Development and ImplementationDocument3 paginiAriando Purba: Nov 2017-: CV. Mulia Abadi (Knitto Textiles) - Present System Development and ImplementationariandoÎncă nu există evaluări
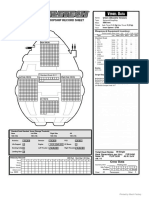
- Union Class Dropship 3025Document1 paginăUnion Class Dropship 3025A KÎncă nu există evaluări
- Bagheri Gavkosh2021Document17 paginiBagheri Gavkosh2021Dan Alfred SebualaÎncă nu există evaluări
- Intructional Tools With The Integration of TechnologyDocument44 paginiIntructional Tools With The Integration of TechnologyAlwyn SacandalÎncă nu există evaluări
- 010 Informed Search 2 - A StarDocument20 pagini010 Informed Search 2 - A StarRashdeep SinghÎncă nu există evaluări
- Refill Brand Guidelines 2Document23 paginiRefill Brand Guidelines 2Catalin MihailescuÎncă nu există evaluări
- Amendment Notes For June 2021Document32 paginiAmendment Notes For June 2021arohi gupta0% (2)
- UST G N 2011: Banking Laws # I. The New Central Bank Act (Ra 7653)Document20 paginiUST G N 2011: Banking Laws # I. The New Central Bank Act (Ra 7653)Clauds GadzzÎncă nu există evaluări
- Mba Mini Project ReportDocument32 paginiMba Mini Project ReportAvneesh KumarÎncă nu există evaluări
- Doctrine of Indoor ManagementDocument4 paginiDoctrine of Indoor ManagementRavi KtÎncă nu există evaluări
- BDA Guide To Successful Brickwor1kDocument259 paginiBDA Guide To Successful Brickwor1kMudassar AhmadÎncă nu există evaluări
- 358 IG Fashion Pack PDFDocument4 pagini358 IG Fashion Pack PDFbovsichÎncă nu există evaluări
- DocumentDocument2 paginiDocumentAddieÎncă nu există evaluări
- WT Notes by Mohammed Ahmed PDFDocument11 paginiWT Notes by Mohammed Ahmed PDFElavarasan MathiÎncă nu există evaluări
- Manual of Infection Prevention and Control (PDFDrive)Document399 paginiManual of Infection Prevention and Control (PDFDrive)அந்தோணி சாமி100% (1)
- Scope and Sequence Plan Stage4 Year7 Visual ArtsDocument5 paginiScope and Sequence Plan Stage4 Year7 Visual Artsapi-254422131Încă nu există evaluări
- Box MCB Hager BrochureDocument5 paginiBox MCB Hager BrochureTOLLAUT DESIGNÎncă nu există evaluări
- Hospital DocumentsDocument17 paginiHospital DocumentsRaviraj PisheÎncă nu există evaluări
- Antenna MCQsDocument38 paginiAntenna MCQsAishwarya BalamuruganÎncă nu există evaluări
- Materials Science and Engineering ADocument10 paginiMaterials Science and Engineering Akhudhayer1970Încă nu există evaluări