S-ar putea să vă placă și
- Variable Speed AC Drives with Inverter Output FiltersDe la EverandVariable Speed AC Drives with Inverter Output FiltersÎncă nu există evaluări
- Alternator ParellelingDocument11 paginiAlternator ParellelingŘỗ Ðê ČỗňŝťãňčẹÎncă nu există evaluări
- Parallel Operation With A Network SystemDocument27 paginiParallel Operation With A Network Systemsaulcastano6556100% (3)
- Automatic Control in Power Generation, Distribution and Protection: Proceedings of the IFAC Symposium, Pretoria, Republic of South Africa, 15-19 September 1980De la EverandAutomatic Control in Power Generation, Distribution and Protection: Proceedings of the IFAC Symposium, Pretoria, Republic of South Africa, 15-19 September 1980J. F. HerbstEvaluare: 3.5 din 5 stele3.5/5 (2)
- Soft StartersDocument4 paginiSoft StartersShah JayÎncă nu există evaluări
- AlternatorDocument84 paginiAlternatorVignesh Kumar100% (1)
- Turbo GeneratorDocument7 paginiTurbo GeneratorSagar KhandelwalÎncă nu există evaluări
- 2 - Generator Model Validation PDFDocument62 pagini2 - Generator Model Validation PDFRaihan KamilÎncă nu există evaluări
- Automatic Voltage RegulatorDocument8 paginiAutomatic Voltage Regulatoradhyartha100% (1)
- Frequency and Load ControlDocument37 paginiFrequency and Load Controlobisonandlaw100% (1)
- Unified Power Flow Controller Technology and ApplicationDe la EverandUnified Power Flow Controller Technology and ApplicationEvaluare: 4 din 5 stele4/5 (5)
- Cross Current CompensationDocument2 paginiCross Current Compensationwagner_guimarães_1Încă nu există evaluări
- Electrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977De la EverandElectrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977Încă nu există evaluări
- Problems in the Design and Development of 750 MW Turbogenerators: International Series of Monographs on Electronics and InstrumentationDe la EverandProblems in the Design and Development of 750 MW Turbogenerators: International Series of Monographs on Electronics and InstrumentationÎncă nu există evaluări
- 2-Pole Turbine Driven Generators - Brushless ExcitationDocument2 pagini2-Pole Turbine Driven Generators - Brushless ExcitationChandrasekar Karuppasamy100% (1)
- A Rapid Reading Book for Fresh Electrical Engineering Graduates: For Job AspirantsDe la EverandA Rapid Reading Book for Fresh Electrical Engineering Graduates: For Job AspirantsÎncă nu există evaluări
- Electrical (Generator and Electrical Plant): Modern Power Station PracticeDe la EverandElectrical (Generator and Electrical Plant): Modern Power Station PracticeEvaluare: 4 din 5 stele4/5 (9)
- Designing An Excitation System: Example #1 - A Simple Standby GeneratorDocument25 paginiDesigning An Excitation System: Example #1 - A Simple Standby Generatorparatonerq0% (1)
- Tuning A PID Controller For A Digital Excitation Control SystemDocument8 paginiTuning A PID Controller For A Digital Excitation Control SystemSharat Chandra KeswarÎncă nu există evaluări
- Generator Operation ModesDocument5 paginiGenerator Operation ModesWong TerbiumÎncă nu există evaluări
- Excitation SystemDocument64 paginiExcitation SystemAnand Swami90% (10)
- Electric GeneratorDocument7 paginiElectric GeneratorRahul ShivuÎncă nu există evaluări
- Woodward Speed Droop PDFDocument8 paginiWoodward Speed Droop PDFedgarlimas100% (1)
- Generator Protection Applicatin Guide Basler ElectricDocument28 paginiGenerator Protection Applicatin Guide Basler ElectricSaravanan NatarajanÎncă nu există evaluări
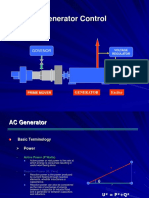
- Generator ControlDocument47 paginiGenerator ControlYT Zhou100% (1)
- Voltage Regulation at Sites With Distributed GenerationDocument10 paginiVoltage Regulation at Sites With Distributed GenerationpetarlÎncă nu există evaluări
- Generator SynchronisationDocument12 paginiGenerator SynchronisationTapas Chaudhuri100% (1)
- Generator Speed ControlDocument26 paginiGenerator Speed ControlagwhiteÎncă nu există evaluări
- Generator Capability CurveDocument142 paginiGenerator Capability CurveCarib40% (5)
- Isochronous Vs Droop Control For GeneratorsDocument4 paginiIsochronous Vs Droop Control For GeneratorsVannex Mensidor100% (1)
- Generator Paralleling: Key PointsDocument4 paginiGenerator Paralleling: Key PointsdevatherockÎncă nu există evaluări
- Emergency Generator - Paralleling Switchgear Power Switching Control Methodologies For LV and MV ApplicationsDocument49 paginiEmergency Generator - Paralleling Switchgear Power Switching Control Methodologies For LV and MV ApplicationsTrần Quang Tuyên100% (1)
- Reference Manual: Governing Fundamentals and Power ManagementDocument76 paginiReference Manual: Governing Fundamentals and Power ManagementMohamed M. SalahÎncă nu există evaluări
- Generator Excitation System Desing ConsiderationDocument44 paginiGenerator Excitation System Desing ConsiderationSrinu Srinivasarao100% (6)
- Power OscillationsDocument54 paginiPower OscillationsVijay RohillaÎncă nu există evaluări
- Gas Engine GoverningDocument8 paginiGas Engine GoverningMiguel SoteloÎncă nu există evaluări
- Starting Methods of Three Phase Induction MotorsDocument15 paginiStarting Methods of Three Phase Induction MotorsMohitSharmaÎncă nu există evaluări
- Power Generation System and Troubleshooting of Gas and Diesel GeneratorDocument48 paginiPower Generation System and Troubleshooting of Gas and Diesel GeneratorHarry100% (1)
- Generator ExcitationDocument51 paginiGenerator Excitationprotecciones100% (1)
- Componding Excitation System - SeimensDocument12 paginiComponding Excitation System - SeimensBalu M100% (2)
- Introduction To AlternatorsDocument12 paginiIntroduction To AlternatorsAriane Joyce Villafranca GaraÎncă nu există evaluări
- Automatic Voltage RegulatorDocument27 paginiAutomatic Voltage RegulatorHarpreet SharmaÎncă nu există evaluări
- The Restricted Earth Fault Relay Operation: Impact of Current Transformer Knee Point VoltagesDocument5 paginiThe Restricted Earth Fault Relay Operation: Impact of Current Transformer Knee Point VoltagesPradeep_VashistÎncă nu există evaluări
- Synchronous Generator II PDFDocument20 paginiSynchronous Generator II PDFCh. Ali GhafoorÎncă nu există evaluări
- Motor and Starter TrainingDocument30 paginiMotor and Starter Trainingsrukeer100% (1)
- Gen ProtectionDocument33 paginiGen Protectionhafiz_hazreen100% (1)
- 3882 1 RG3CatalogueDocument12 pagini3882 1 RG3CatalogueJose Domingo Castro100% (1)
- Automatic Voltage RegulatorDocument27 paginiAutomatic Voltage RegulatorAnonymous BBX2E87aHÎncă nu există evaluări
- AREP Excitation White PaperDocument3 paginiAREP Excitation White PaperNotfound Byu100% (2)
- 00073786-Minimum Excitation Limiter Effects On Generator Response To System DisturbancesDocument10 pagini00073786-Minimum Excitation Limiter Effects On Generator Response To System DisturbancesadinamartinsÎncă nu există evaluări
- CH - Excitation Control Systems Bulletin PDFDocument12 paginiCH - Excitation Control Systems Bulletin PDFSalih Ahmed ObeidÎncă nu există evaluări
- Static Excitation SystemDocument61 paginiStatic Excitation SystemSiva Kumar Tutika100% (8)
- Lab 14 - 3-Phase AlternatorDocument7 paginiLab 14 - 3-Phase AlternatorjalilemadiÎncă nu există evaluări
- Experiment - 07 Open and Short Circuit of 3 Phase AlternatorDocument8 paginiExperiment - 07 Open and Short Circuit of 3 Phase Alternatorcharanrck10Încă nu există evaluări
- Induction MotorDocument43 paginiInduction MotorJanine Jade SetiasÎncă nu există evaluări
- Emergency Diesel Generator The Generator, Exciter, and Voltage RegulationDocument34 paginiEmergency Diesel Generator The Generator, Exciter, and Voltage RegulationCarolinaÎncă nu există evaluări
- Synchronous Machines and SCDocument6 paginiSynchronous Machines and SCivancho04mÎncă nu există evaluări
- Pioneer PLX 500kDocument15 paginiPioneer PLX 500kFabiÎncă nu există evaluări
- LogDocument548 paginiLogRegine CalipayÎncă nu există evaluări
- ITC-3 Technical Description - 2020 PDFDocument24 paginiITC-3 Technical Description - 2020 PDFAndres Mtz CotaÎncă nu există evaluări
- 3.6.3 Function Block Diagram: 3 Operation TheoryDocument2 pagini3.6.3 Function Block Diagram: 3 Operation TheoryAC DCÎncă nu există evaluări
- Key Responsibility AreasDocument6 paginiKey Responsibility AreasSubodh YadavÎncă nu există evaluări
- Dmic Gujarat NewDocument2 paginiDmic Gujarat NewArjun AgrawalÎncă nu există evaluări
- DESIGN AND SIMULATION OF 2-TO-4 DECODER USING 32nm, 45nm AND 65nm CMOS TECHNOLOGYDocument4 paginiDESIGN AND SIMULATION OF 2-TO-4 DECODER USING 32nm, 45nm AND 65nm CMOS TECHNOLOGYijsret0% (1)
- MOTOROLA Walkie Talkie Consumer Radio TLKR T80Document2 paginiMOTOROLA Walkie Talkie Consumer Radio TLKR T80Sbnjkt aÎncă nu există evaluări
- Mk10E Brochure - English PDFDocument2 paginiMk10E Brochure - English PDFmatthewivanÎncă nu există evaluări
- Government Approved Workshop Gazette NotificationDocument9 paginiGovernment Approved Workshop Gazette NotificationadheesÎncă nu există evaluări
- System and Standard Functions For S7-300 and S7-400Document586 paginiSystem and Standard Functions For S7-300 and S7-400orgil02220100% (1)
- Harvey Newman Receives Department of Energy, Office of High Energy Physics Lifelong Achievement AwardDocument2 paginiHarvey Newman Receives Department of Energy, Office of High Energy Physics Lifelong Achievement AwardMaria SpiropuluÎncă nu există evaluări
- 4ipnet Solution HotelDocument27 pagini4ipnet Solution HotelAdrian Gamboa MarcellanaÎncă nu există evaluări
- ISO 39001 - Peter HartzellDocument33 paginiISO 39001 - Peter HartzellJosefinaGarcía100% (2)
- Hicure enDocument2 paginiHicure enjohanes kharismaÎncă nu există evaluări
- Connecting To The Internet With Pico WDocument30 paginiConnecting To The Internet With Pico WKnut BoergeÎncă nu există evaluări
- HsDocument97 paginiHspihkkÎncă nu există evaluări
- Logic Gate - WikipediaDocument17 paginiLogic Gate - WikipediaElla Canonigo CanteroÎncă nu există evaluări
- DC Inverter Multi-System Air ConditionerDocument122 paginiDC Inverter Multi-System Air ConditionerSergio ReyesÎncă nu există evaluări
- 7.2.5 APQP Phase 2 Checklist Dec 2013Document21 pagini7.2.5 APQP Phase 2 Checklist Dec 2013Mani Rathinam RajamaniÎncă nu există evaluări
- ERP ArchitectureDocument43 paginiERP ArchitectureÄkshít ŠhàŕmäÎncă nu există evaluări
- Signal and Telecommunication Workshop-2Document13 paginiSignal and Telecommunication Workshop-2Sarath Kumar100% (1)
- Ag ExtensionDocument101 paginiAg ExtensionWaren LlorenÎncă nu există evaluări
- Lab Design and Analysis of Active CS and Cascode AmplifierDocument3 paginiLab Design and Analysis of Active CS and Cascode AmplifierAzure HereÎncă nu există evaluări
- Digital Mastermind Playbook EN - v4 20190902Document27 paginiDigital Mastermind Playbook EN - v4 20190902Pham Minh HoangÎncă nu există evaluări
- ZAPI AC-1 ManualDocument62 paginiZAPI AC-1 ManualMarcos Gregorio da SilvaÎncă nu există evaluări
- Implementing Accounting HubDocument258 paginiImplementing Accounting HubNarendra ReddyÎncă nu există evaluări
- Mini210s Manual 20120531Document233 paginiMini210s Manual 20120531cor01Încă nu există evaluări
- LIFI PresentationDocument15 paginiLIFI PresentationAditya SinghÎncă nu există evaluări
- Type 2625 and 2625NS Volume BoostersDocument4 paginiType 2625 and 2625NS Volume Boostershamz786Încă nu există evaluări