S-ar putea să vă placă și
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (120)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Mathletics Workbook Reasoning in Geometry Book 2 Student PDFDocument15 paginiMathletics Workbook Reasoning in Geometry Book 2 Student PDFMathKeys60% (5)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- Grade 2 Reading Reviewer 3rd QuarterDocument3 paginiGrade 2 Reading Reviewer 3rd QuarterbananamushÎncă nu există evaluări
- Answer KeyDocument7 paginiAnswer KeyBernard ChanÎncă nu există evaluări
- Non Verbal Intelligence Test Answers 1 - 2Document17 paginiNon Verbal Intelligence Test Answers 1 - 2sreyasÎncă nu există evaluări
- 62 Addition and Subtraction of Geometric VectorsDocument4 pagini62 Addition and Subtraction of Geometric VectorsDan AvrukhÎncă nu există evaluări
- Teacher IdentityDocument3 paginiTeacher Identityapi-286090617Încă nu există evaluări
- Circle Geometry THEOREMDocument46 paginiCircle Geometry THEOREMHazel Clemente CarreonÎncă nu există evaluări
- Algebra 2 & Trig Regent ReviewDocument16 paginiAlgebra 2 & Trig Regent ReviewCassieGrecoÎncă nu există evaluări
- Solution of Triangle (Unit - 2)Document49 paginiSolution of Triangle (Unit - 2)Santosh YaramatiÎncă nu există evaluări
- Chapter 4.4 Inverse Circular Functions PDFDocument5 paginiChapter 4.4 Inverse Circular Functions PDFjiiÎncă nu există evaluări
- MATH10 Lesson 9Document50 paginiMATH10 Lesson 9Bea OroÎncă nu există evaluări
- AP GP FinalDocument53 paginiAP GP FinalPratul PrakharÎncă nu există evaluări
- Y5 Autumn Block 4 WO13 Add Two Mixed Numbers 2022Document2 paginiY5 Autumn Block 4 WO13 Add Two Mixed Numbers 2022Ashish PacharÎncă nu există evaluări
- JMC 2001 Ans HWrittenDocument11 paginiJMC 2001 Ans HWrittenaditya.padi4Încă nu există evaluări
- Class Schedule Set A (English and Mapeh) : Sandulot Elementary SchoolDocument2 paginiClass Schedule Set A (English and Mapeh) : Sandulot Elementary SchoolISAGANIÎncă nu există evaluări
- 7227 LRDI15mbaa2021Document15 pagini7227 LRDI15mbaa2021xyzÎncă nu există evaluări
- Grade 10 Math - CircleDocument19 paginiGrade 10 Math - CircleRobengie MoneraÎncă nu există evaluări
- Bepc Unt 20230808170946426Document2 paginiBepc Unt 20230808170946426malondalebeauÎncă nu există evaluări
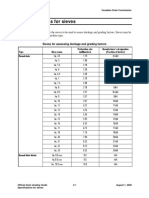
- 03-Sieves-E BfsDocument2 pagini03-Sieves-E BfsAmal Falamigi SatrioÎncă nu există evaluări
- Exercise 3Document3 paginiExercise 3Anant DwivediÎncă nu există evaluări
- Maths Basic SampleDocument6 paginiMaths Basic Sampleabani kantaÎncă nu există evaluări
- 2019-2020 Crec Magnet School District CalendarDocument1 pagină2019-2020 Crec Magnet School District Calendarapi-424138713Încă nu există evaluări
- 2013-03-07 The County TimesDocument40 pagini2013-03-07 The County TimesSouthern Maryland OnlineÎncă nu există evaluări
- MATH01 Answers Assignment7 ConeDocument4 paginiMATH01 Answers Assignment7 ConeabiÎncă nu există evaluări
- Regent Secondary School End of Year Examination (Sa2) 2017 Secondary One (Express)Document29 paginiRegent Secondary School End of Year Examination (Sa2) 2017 Secondary One (Express)Eugene ChanÎncă nu există evaluări
- Weekly Exam 02Document14 paginiWeekly Exam 02Christian AndipaÎncă nu există evaluări
- Parallel Perpendicular Linear Graphs PDFDocument13 paginiParallel Perpendicular Linear Graphs PDFsohaila ibrahimÎncă nu există evaluări
- SSC CGL ST 317.pdf1473658713Document9 paginiSSC CGL ST 317.pdf1473658713Shashikanth ChinnaÎncă nu există evaluări