S-ar putea să vă placă și
- Spec. Engine GeneratorsDocument21 paginiSpec. Engine Generatorsahmadgce04Încă nu există evaluări
- 5 Engine Specification SheetDocument6 pagini5 Engine Specification SheetpyrodidoÎncă nu există evaluări
- ABB Master Manual For Induction Motors and Generators RevCDocument157 paginiABB Master Manual For Induction Motors and Generators RevCRavindra Kumar KaulÎncă nu există evaluări
- Generator Power Application Guide: Blue Star 145/185 Bobcat 225Document16 paginiGenerator Power Application Guide: Blue Star 145/185 Bobcat 225Younus BakshiÎncă nu există evaluări
- Study of a reluctance magnetic gearbox for energy storage system applicationDe la EverandStudy of a reluctance magnetic gearbox for energy storage system applicationEvaluare: 1 din 5 stele1/5 (1)
- Gcu 20 Manual enDocument4 paginiGcu 20 Manual enRachel DanielsÎncă nu există evaluări
- CL160CD&E InstallDocument4 paginiCL160CD&E InstallJosë Rodríguez100% (1)
- EMI Signal GeneratorsDocument10 paginiEMI Signal GeneratorsNaga HimanshuÎncă nu există evaluări
- Lotos CT520D ManualDocument12 paginiLotos CT520D Manualgsmith21100% (1)
- Cummins Gta1710g Natural Gas EngineDocument2 paginiCummins Gta1710g Natural Gas EngineAbhi Karmyal100% (1)
- EMI-Signal GeneratorsDocument7 paginiEMI-Signal GeneratorsVineela ThonduriÎncă nu există evaluări
- Tad 722 GeDocument2 paginiTad 722 GePaulo César Managó100% (1)
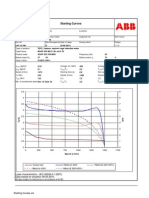
- ABB Motors Starting Curves and Generators: Apr, GH LewaDocument1 paginăABB Motors Starting Curves and Generators: Apr, GH LewaMarko IstenicÎncă nu există evaluări
- Belt-Coupled Motor Generator SetDocument173 paginiBelt-Coupled Motor Generator Setcustro_mohaleÎncă nu există evaluări
- KMT SL-VI 50 72159007 (r01) PDFDocument390 paginiKMT SL-VI 50 72159007 (r01) PDF杜文欽100% (1)
- 4008TAG2 Electro Unit PN2199Document2 pagini4008TAG2 Electro Unit PN2199RioÎncă nu există evaluări
- Electric GeneratorDocument7 paginiElectric GeneratorRahul ShivuÎncă nu există evaluări
- SGPDocument5 paginiSGPgopala krishnanÎncă nu există evaluări
- Comap Ig Combi 1.0Document102 paginiComap Ig Combi 1.0keykakyÎncă nu există evaluări
- Service ManualDocument332 paginiService ManualfalcoÎncă nu există evaluări
- Horse Power KW and KVA Conversion ChartDocument3 paginiHorse Power KW and KVA Conversion ChartReymart ManablugÎncă nu există evaluări
- Dodge Speed Reducers Parts Replacement ManualDocument9 paginiDodge Speed Reducers Parts Replacement Manuala04205Încă nu există evaluări
- Caterpillar XQ80 Towable Diesel Generator SetDocument5 paginiCaterpillar XQ80 Towable Diesel Generator SetMacAllister MachineryÎncă nu există evaluări
- Regulador Marathon Magnamax PM100Document33 paginiRegulador Marathon Magnamax PM100Manuel OteroÎncă nu există evaluări
- AVK Voltage Regulator COSIMAT C2Document1 paginăAVK Voltage Regulator COSIMAT C2ibrahim salemÎncă nu există evaluări
- Schneider CatalogDocument56 paginiSchneider CatalogSani Poulou100% (1)
- Diesel Engine MitsubishiDocument4 paginiDiesel Engine MitsubishiMarbun Benny100% (1)
- 3412C EMCP II For MUI Engines Electrical System: Tgc1-Up Djn1-Up 9EP1-2988 Tft1-Up BCW1-744 Lry1-Up Rty1-Up 4BZ1-6087Document4 pagini3412C EMCP II For MUI Engines Electrical System: Tgc1-Up Djn1-Up 9EP1-2988 Tft1-Up BCW1-744 Lry1-Up Rty1-Up 4BZ1-6087luis alberto rodriguezÎncă nu există evaluări
- Leroy Somer LSA 50.2 From Macfarlane Generators PDFDocument12 paginiLeroy Somer LSA 50.2 From Macfarlane Generators PDFAnonymous 3RS6JNcÎncă nu există evaluări
- TP 6929Document180 paginiTP 6929Egberto Pino GuerreroÎncă nu există evaluări
- Honda Agregat Ex350Document40 paginiHonda Agregat Ex350Gaby ŠerićÎncă nu există evaluări
- Lakeshore MC-Operating-Manual-with-MP7650-2012 PDFDocument52 paginiLakeshore MC-Operating-Manual-with-MP7650-2012 PDFLeo BurnsÎncă nu există evaluări
- SSAA-001 - Grupo Electrogeno - GENERAC - SD130Document170 paginiSSAA-001 - Grupo Electrogeno - GENERAC - SD130DanielaÎncă nu există evaluări
- Data Download HGM1770 V1.6 enDocument19 paginiData Download HGM1770 V1.6 enJohn GarnetÎncă nu există evaluări
- Controller HAT600NBDocument24 paginiController HAT600NBOrlando David Zeña SandovalÎncă nu există evaluări
- P45PBDocument4 paginiP45PBConstantyn_FrederikÎncă nu există evaluări
- Cummins960 0504Document92 paginiCummins960 0504vuongymy100% (1)
- 03Document4 pagini03Didik RiswantoÎncă nu există evaluări
- Cat 3304b Disassimble BearingDocument8 paginiCat 3304b Disassimble BearingMahmoud KhattabÎncă nu există evaluări
- Prince Hydraulics Sectional Body Model SV Offered by PRC Industrial SupplyDocument18 paginiPrince Hydraulics Sectional Body Model SV Offered by PRC Industrial SupplyPRC Industrial SupplyÎncă nu există evaluări
- MGS2700 - Rating Definition SheetDocument1 paginăMGS2700 - Rating Definition SheetMuhammad Ibad AlamÎncă nu există evaluări
- Davey Xp350p8cDocument2 paginiDavey Xp350p8cNum470% (1)
- Module 3. Design of 3 Phase Induction MotorDocument43 paginiModule 3. Design of 3 Phase Induction MotorVivek Pawar83% (6)
- Frequency Detection Module (FDM) : General Description Technical SpecificationDocument4 paginiFrequency Detection Module (FDM) : General Description Technical SpecificationKenNa100% (1)
- AMMPS-Generator Operations SODocument36 paginiAMMPS-Generator Operations SOGreenMountainGenerators100% (1)
- FWT DIAPHRAGM Motor Dosing Pumps ENG Rev1 - 0215Document6 paginiFWT DIAPHRAGM Motor Dosing Pumps ENG Rev1 - 0215Imar KusumaÎncă nu există evaluări
- Shema Esab Origo Mag C171 C201 C251Document20 paginiShema Esab Origo Mag C171 C201 C251cornelutsÎncă nu există evaluări
- SK User ManualDocument421 paginiSK User ManualBrahimiÎncă nu există evaluări
- Vibration Damper and Pulley - Remove and InstallDocument3 paginiVibration Damper and Pulley - Remove and Installbejoythomas100% (1)
- Eq Generacion Electrica Iluminacion Olympian GEP150Document5 paginiEq Generacion Electrica Iluminacion Olympian GEP150Gianni EscalanteÎncă nu există evaluări
- 6M16G275/5 Powerkit Engine Datasheet: RatingsDocument4 pagini6M16G275/5 Powerkit Engine Datasheet: RatingsDANE80Încă nu există evaluări
- 3 Waukesha Gas Engine Maintenance ManualDocument75 pagini3 Waukesha Gas Engine Maintenance ManualMamunÎncă nu există evaluări
- Shield-Arc 400AS-50: IMA 554CDocument24 paginiShield-Arc 400AS-50: IMA 554Cahmedhassankhan100% (1)
- 100 RDDocument4 pagini100 RDMahmoud EldabahÎncă nu există evaluări
- Avk DSGDocument24 paginiAvk DSGOwais Malik100% (1)
- Infineon Bipolar AN20012 01 Technical Information An v1.0 enDocument84 paginiInfineon Bipolar AN20012 01 Technical Information An v1.0 enflash_90697638Încă nu există evaluări
- Synchro N MotorDocument18 paginiSynchro N MotorDong BachÎncă nu există evaluări
- 1 M2QA - IEC StandardDocument28 pagini1 M2QA - IEC StandardgabrielÎncă nu există evaluări
- 1Ph Motor 2010Document8 pagini1Ph Motor 2010t_meierÎncă nu există evaluări
- Dry DockingDocument84 paginiDry DockingInder Mukhopadhyay100% (5)
- Ais Navigation Status CodesDocument9 paginiAis Navigation Status CodesInder MukhopadhyayÎncă nu există evaluări
- Six Sigma Implementation For Ship Maintenance and Safety ManagementDocument18 paginiSix Sigma Implementation For Ship Maintenance and Safety ManagementtalabizÎncă nu există evaluări
- ABS PerformanceDocument53 paginiABS PerformanceInder MukhopadhyayÎncă nu există evaluări
- DD Excellence 2 PagerDocument2 paginiDD Excellence 2 PagerInder MukhopadhyayÎncă nu există evaluări
- VLCC TCE CalculationDocument5 paginiVLCC TCE Calculationsailsah-ejobÎncă nu există evaluări
- Questionnaire: S/N Information We Need From Clients Why We Need ItDocument1 paginăQuestionnaire: S/N Information We Need From Clients Why We Need ItInder MukhopadhyayÎncă nu există evaluări
- DgpsDocument1 paginăDgpsInder MukhopadhyayÎncă nu există evaluări
- Brochure Ib RINA Mod Dry Dock Process Management enDocument2 paginiBrochure Ib RINA Mod Dry Dock Process Management enInder MukhopadhyayÎncă nu există evaluări
- Echo So UnderDocument1 paginăEcho So UnderInder MukhopadhyayÎncă nu există evaluări
- Optimization of Advanced Diesel Engine Combustion StrategiesDocument21 paginiOptimization of Advanced Diesel Engine Combustion StrategiesInder MukhopadhyayÎncă nu există evaluări
- Singapore Visit ListDocument2 paginiSingapore Visit ListInder MukhopadhyayÎncă nu există evaluări
- ChatLog Royal Marine - Bunker Management - Maritime Petagram 2015-04-24 15 - 43Document1 paginăChatLog Royal Marine - Bunker Management - Maritime Petagram 2015-04-24 15 - 43Inder MukhopadhyayÎncă nu există evaluări
- BWT AdvisoryDocument80 paginiBWT AdvisoryInder MukhopadhyayÎncă nu există evaluări
- Engine Documentation: RTA96C-BDocument1 paginăEngine Documentation: RTA96C-BInder MukhopadhyayÎncă nu există evaluări
- Sve 2003Document16 paginiSve 2003Inder MukhopadhyayÎncă nu există evaluări
- Marcel Veldhuis Scientist Royal Netherland InstituteDocument30 paginiMarcel Veldhuis Scientist Royal Netherland InstituteInder MukhopadhyayÎncă nu există evaluări
- Designing Stern Tube BearingDocument5 paginiDesigning Stern Tube Bearinginder2655Încă nu există evaluări
- M-11 Steam Heat BalanceDocument10 paginiM-11 Steam Heat BalanceInder MukhopadhyayÎncă nu există evaluări
- Optimization of EGR Rate On Multi Cylinders 4-Stroke Diesel Engine.Document7 paginiOptimization of EGR Rate On Multi Cylinders 4-Stroke Diesel Engine.Inder MukhopadhyayÎncă nu există evaluări
- Crankshaft Full Report 2Document208 paginiCrankshaft Full Report 2Anirudhreddy SafalÎncă nu există evaluări
- TW Knowledge 440514019Document8 paginiTW Knowledge 440514019Inder MukhopadhyayÎncă nu există evaluări
- 0001Document84 pagini0001chakkras2011Încă nu există evaluări
- Henrik Bacher ElomaticDocument35 paginiHenrik Bacher ElomaticInder MukhopadhyayÎncă nu există evaluări
- 2004sae HiroyasuDocument13 pagini2004sae HiroyasuInder MukhopadhyayÎncă nu există evaluări
- Crankshaft Full Report 2Document208 paginiCrankshaft Full Report 2Anirudhreddy SafalÎncă nu există evaluări
- Circular No 83 2011Document3 paginiCircular No 83 2011Inder MukhopadhyayÎncă nu există evaluări
- LIM ReportDocument59 paginiLIM ReportInder MukhopadhyayÎncă nu există evaluări
- Finite Element Analysis of Marine Diesel Engine ComponentsDocument10 paginiFinite Element Analysis of Marine Diesel Engine ComponentsInder Mukhopadhyay100% (1)
- Bosch System Basis Chip Cy329 Product SummaryDocument6 paginiBosch System Basis Chip Cy329 Product SummaryPijai TDMÎncă nu există evaluări
- SKT Series Set-Up Parameter (V08 - 20100826)Document32 paginiSKT Series Set-Up Parameter (V08 - 20100826)medmedÎncă nu există evaluări
- CSP-P Seismic Energy Source: Applied Acoustic Engineering LTDDocument2 paginiCSP-P Seismic Energy Source: Applied Acoustic Engineering LTDDadang KurniaÎncă nu există evaluări
- Inversor PV1800 VHM (220V) SPECSDocument4 paginiInversor PV1800 VHM (220V) SPECSwilliam andres pena castanoÎncă nu există evaluări
- Paradise Cable Catalouge PDFDocument112 paginiParadise Cable Catalouge PDFtanzir40% (5)
- CHP SopDocument26 paginiCHP Sopkalyanm20351550% (2)
- Dump Truck Questions Final.Document5 paginiDump Truck Questions Final.omphiletlotlegoÎncă nu există evaluări
- Pre Delivery Inspection ChecklistDocument1 paginăPre Delivery Inspection ChecklistAman MeshramÎncă nu există evaluări
- Am2020 FacpDocument268 paginiAm2020 Facpaubz20Încă nu există evaluări
- Safa Observation Checklist 01.01.2020Document4 paginiSafa Observation Checklist 01.01.2020ad DÎncă nu există evaluări
- Excitation System of Generator: Presented By: Niaz Akhtar Gte-ElectDocument40 paginiExcitation System of Generator: Presented By: Niaz Akhtar Gte-Electrk250Încă nu există evaluări
- Yamaha Manual Rx-V2092Document88 paginiYamaha Manual Rx-V2092nigosanÎncă nu există evaluări
- 2ME705-4-Hydraulic and Pneumatic SystemsDocument2 pagini2ME705-4-Hydraulic and Pneumatic SystemsDev Chauhan100% (1)
- Unit 5 Special Electr UmasnkarDocument3 paginiUnit 5 Special Electr UmasnkarvlkumashankardeekshithÎncă nu există evaluări
- BKN Type: Technical DataDocument8 paginiBKN Type: Technical DataLaura Melissa Espitia GalloÎncă nu există evaluări
- WEG Hydrogenerators Gh20 14824113 Manual EnglishDocument51 paginiWEG Hydrogenerators Gh20 14824113 Manual EnglishGuilherme RosaÎncă nu există evaluări
- Preventive Maintenance Checklist - KR150Document7 paginiPreventive Maintenance Checklist - KR150Juan c sanchezÎncă nu există evaluări
- Eee 335 L2Document30 paginiEee 335 L2Cheung KinTungÎncă nu există evaluări
- Content - Fisher RegulatorsDocument44 paginiContent - Fisher Regulatorsbcjal100% (1)
- Exclusive Offer: Save Big On Wholesale Auto Parts For Automotive Part Manufacturers and Dealers!Document32 paginiExclusive Offer: Save Big On Wholesale Auto Parts For Automotive Part Manufacturers and Dealers!Wheel MoversÎncă nu există evaluări
- Schindler 3100 MRL Elevator BrochureDocument20 paginiSchindler 3100 MRL Elevator Brochureali7hedayatiÎncă nu există evaluări
- TCC-80/80I Series: Port-Powered RS-232 To RS-422/485 Converters With Optional 2.5 KV IsolationDocument5 paginiTCC-80/80I Series: Port-Powered RS-232 To RS-422/485 Converters With Optional 2.5 KV IsolationSudharsan KingÎncă nu există evaluări
- LA450AXD2Document10 paginiLA450AXD2Libro AzulÎncă nu există evaluări
- Danfoss FCM300 Quick SetupDocument5 paginiDanfoss FCM300 Quick SetupLuis MorenoÎncă nu există evaluări
- 105 DataDocument2 pagini105 DataKarim OmranÎncă nu există evaluări
- ACL TOP 500 Service Manual Rev 01Document764 paginiACL TOP 500 Service Manual Rev 01suny8781Încă nu există evaluări
- Manual Subwoofer Velodyne ImpactDocument17 paginiManual Subwoofer Velodyne Impactmgibson2000Încă nu există evaluări
- Engineering Notebook For x-3Document13 paginiEngineering Notebook For x-3api-261545606Încă nu există evaluări
- MillerDocument88 paginiMillerkimba worthÎncă nu există evaluări
- Set No: 1: Electrical Machines - IiiDocument8 paginiSet No: 1: Electrical Machines - IiiViswa ChaitanyaÎncă nu există evaluări