S-ar putea să vă placă și
- 04 Lab2 - Ejercicios de CLIPS PDFDocument8 pagini04 Lab2 - Ejercicios de CLIPS PDFUli JalcantÎncă nu există evaluări
- Principios Tabla de EnrutamientoDocument9 paginiPrincipios Tabla de EnrutamientoХристианин СотняÎncă nu există evaluări
- Convergencia y RedundanciaDocument8 paginiConvergencia y RedundanciaDominikÎncă nu există evaluări
- Ejemplos de Sistemas ExpertosDocument4 paginiEjemplos de Sistemas ExpertosMelisaRíosCarvajalÎncă nu există evaluări
- Introducción Al Modelo de Programcion FuncionalDocument6 paginiIntroducción Al Modelo de Programcion FuncionalHéctor Quezada100% (1)
- Metodos de Control de ConcurrenciaDocument10 paginiMetodos de Control de ConcurrenciaNav Martz Soria100% (3)
- Replicacion Con SlonyDocument15 paginiReplicacion Con SlonycarlosÎncă nu există evaluări
- Fundamentos Del Diseño de Software (Resumen)Document4 paginiFundamentos Del Diseño de Software (Resumen)Fran SalinasÎncă nu există evaluări
- Clips IDocument123 paginiClips IJazmin Luisa Gutierrez MamaniÎncă nu există evaluări
- 1 - Cuestionario de Repaso de Repaso Modelo Osi TCPDocument24 pagini1 - Cuestionario de Repaso de Repaso Modelo Osi TCPSanniko PovedaÎncă nu există evaluări
- 2.9 Instrucciones Aritmeticas1Document4 pagini2.9 Instrucciones Aritmeticas1fortino_sanchezÎncă nu există evaluări
- Unidad 2 Lenguajes y AutomatasDocument14 paginiUnidad 2 Lenguajes y AutomatasIrving Cobain100% (1)
- Unidad 3 Convertidores Principios ElectricosDocument11 paginiUnidad 3 Convertidores Principios ElectricosManuel Alligheri LimaÎncă nu există evaluări
- Practica 5: Spanning Tree Protocol : Parte 1: EjerciciosDocument5 paginiPractica 5: Spanning Tree Protocol : Parte 1: EjerciciosCristianÎncă nu există evaluări
- Solucion Al Problema de Los FilosofosDocument3 paginiSolucion Al Problema de Los FilosofosMilagros VegaÎncă nu există evaluări
- Guia para Conectando WEKA A SQL ServerDocument13 paginiGuia para Conectando WEKA A SQL ServerHenry AlvarezÎncă nu există evaluări
- Estado Del Arte de La Ingenieria Del SoftwareDocument5 paginiEstado Del Arte de La Ingenieria Del SoftwareMary OxÎncă nu există evaluări
- Análisis de Los Manejadores de Bases de DatosDocument4 paginiAnálisis de Los Manejadores de Bases de DatosAna Karen SotoÎncă nu există evaluări
- 1.1. Conceptualización de Tecnología Orientada A ObjetosDocument63 pagini1.1. Conceptualización de Tecnología Orientada A ObjetosHector Ramon Flores BernalÎncă nu există evaluări
- Uidad 3 Cliente ServidorDocument5 paginiUidad 3 Cliente ServidorJeronimo MárquezÎncă nu există evaluări
- Evolución de Las Aplicaciones WebDocument11 paginiEvolución de Las Aplicaciones WebLuis Virgilio GamarraÎncă nu există evaluări
- 1.2 Analisis de Los Manejadores de Base de DatosDocument7 pagini1.2 Analisis de Los Manejadores de Base de DatosZeu's RoblesÎncă nu există evaluări
- Características de Los Sistemas Operativos de RedDocument1 paginăCaracterísticas de Los Sistemas Operativos de RedSergio BelmonteÎncă nu există evaluări
- Simulacion de Una Empresa Usando Cisco Packet TracerDocument32 paginiSimulacion de Una Empresa Usando Cisco Packet TracerAroni Barrios SaulÎncă nu există evaluări
- Codigo ObjetoDocument5 paginiCodigo ObjetoYova de LeónÎncă nu există evaluări
- Dispositivos de Capas SuperioresDocument4 paginiDispositivos de Capas SuperioresLUZ AMERICA RIVERA DE LA CRUZÎncă nu există evaluări
- Atributos de Los Sistemas y Aplicaciones Basados en WebDocument19 paginiAtributos de Los Sistemas y Aplicaciones Basados en Webantonio ibarra0% (1)
- Instrucciones Basicas en EnsambladorDocument4 paginiInstrucciones Basicas en Ensambladorfenixmodels100% (1)
- UNIDAD II Normas y EstándaresDocument14 paginiUNIDAD II Normas y EstándaresGilberto XP0% (1)
- Solucionarios CiscoDocument48 paginiSolucionarios CiscoJuan Sanchez100% (1)
- Cuadro Comparativo Cliente ServidorDocument2 paginiCuadro Comparativo Cliente ServidorQaren' Ibarra'0% (1)
- Configuración de Frame Relay PDFDocument3 paginiConfiguración de Frame Relay PDFJorge Antonio Ugarte SaiquitaÎncă nu există evaluări
- Introduccion A CLIPSDocument30 paginiIntroduccion A CLIPSGusTavo PrietoÎncă nu există evaluări
- Hola Mundo en EnsambladorDocument3 paginiHola Mundo en EnsambladorSadusDEATHÎncă nu există evaluări
- Técnicas CriptográficasDocument12 paginiTécnicas CriptográficasBubosqui Buba0% (1)
- Práctica - 2 - Configuración - Básica - de - Enrutadores UTCJDocument5 paginiPráctica - 2 - Configuración - Básica - de - Enrutadores UTCJYadira GraÎncă nu există evaluări
- Tecnicas de Asignacion de Registros en Un CompiladorDocument5 paginiTecnicas de Asignacion de Registros en Un CompiladorAsahel Soto GarciaÎncă nu există evaluări
- Dapi U1 EaDocument6 paginiDapi U1 EaLuisa LuÎncă nu există evaluări
- Ejercicio OSPFDocument9 paginiEjercicio OSPFGerman Arteaga RiosÎncă nu există evaluări
- Manejo de Bus y Aplicacion de Buses PDFDocument4 paginiManejo de Bus y Aplicacion de Buses PDFDavid Montiel Ramirez0% (1)
- Unidad 4Document3 paginiUnidad 4Abreu96Încă nu există evaluări
- 4 Tolerancia A FallosDocument6 pagini4 Tolerancia A FallosHumbert PinedaÎncă nu există evaluări
- Informe Laboratorio AclDocument41 paginiInforme Laboratorio AclEdu CartagenaÎncă nu există evaluări
- Captura de Cadenas Con FormatoDocument11 paginiCaptura de Cadenas Con FormatoEfra LarÎncă nu există evaluări
- Tabla de Tokens SQLDocument13 paginiTabla de Tokens SQLTechilinRyes100% (1)
- Vlan STP VTPDocument6 paginiVlan STP VTPGabriela FloresÎncă nu există evaluări
- Politicas de Seguridad de BDDocument3 paginiPoliticas de Seguridad de BDRaidenzÎncă nu există evaluări
- 3.4 RolesDocument9 pagini3.4 RolesNavarro García Edwin Daniel50% (2)
- Hora 1-5 UMLDocument16 paginiHora 1-5 UMLLulu OlvloÎncă nu există evaluări
- Práctica 1 Protocolo de Enrutamiento RIPDocument6 paginiPráctica 1 Protocolo de Enrutamiento RIPJose MuñozÎncă nu există evaluări
- Introducción CorbaDocument32 paginiIntroducción CorbaLuis Flores MezaÎncă nu există evaluări
- Algoritmo RETEDocument30 paginiAlgoritmo RETEJulio César Sosa YeladaquiÎncă nu există evaluări
- CCNA4 Lab 5 2 5 EsDocument7 paginiCCNA4 Lab 5 2 5 EsBorjaUndaÎncă nu există evaluări
- Unidad 5Document30 paginiUnidad 5Maite CruzÎncă nu există evaluări
- Introduccion Emu8086 v1 3Document16 paginiIntroduccion Emu8086 v1 3anaccoÎncă nu există evaluări
- Unidad I. - Funciones de La Administración de RedesDocument4 paginiUnidad I. - Funciones de La Administración de RedesJorge Arturo Arellano del Aguila100% (1)
- Lenguaje de Manipulación de DatosDocument27 paginiLenguaje de Manipulación de DatosCARMEN JULIANA GUERRERO SILVA100% (1)
- Proyecto ClipsDocument25 paginiProyecto ClipsEduardo Sanchez PiñaÎncă nu există evaluări
- Historia DelphiDocument23 paginiHistoria DelphiCristian HuamaníÎncă nu există evaluări
- Intro Program HGRDocument10 paginiIntro Program HGRHéctor González ReyesÎncă nu există evaluări
- CAT 3 2017 ES LoResDocument706 paginiCAT 3 2017 ES LoResGaston GuardiaÎncă nu există evaluări
- Presentacion de Aridos (Modo de Compatibilidad)Document19 paginiPresentacion de Aridos (Modo de Compatibilidad)Carlos Troncoso SanhuezaÎncă nu există evaluări
- La Heurística y Su Utilidad en La Enseñanza de La MatemáticaDocument14 paginiLa Heurística y Su Utilidad en La Enseñanza de La MatemáticaGustavo GrÎncă nu există evaluări
- ArosteguiDocument424 paginiArosteguiEsteban VediaÎncă nu există evaluări
- Informe Movimiento Armónico SimpleDocument5 paginiInforme Movimiento Armónico SimpleLuifer DíazÎncă nu există evaluări
- Estimulacion TempranaDocument5 paginiEstimulacion Tempranasergio cisterna santillanaÎncă nu există evaluări
- Jacqueline Vasallos¿es Posible Pensar en Una Archivología Feminista?Document3 paginiJacqueline Vasallos¿es Posible Pensar en Una Archivología Feminista?Marta MoralesÎncă nu există evaluări
- Practica de Laboratorio N°01 Humedad de Suelos y AgregadosDocument26 paginiPractica de Laboratorio N°01 Humedad de Suelos y AgregadosDREA260395Încă nu există evaluări
- Forma y Funcion de BarnardDocument186 paginiForma y Funcion de BarnardAdriana Martins Pimentel82% (11)
- Investigación IluminaciónDocument7 paginiInvestigación IluminaciónKarla GonzalezÎncă nu există evaluări
- Cinco Leyendas de Amor Alrededor Del MundoDocument2 paginiCinco Leyendas de Amor Alrededor Del MundoHaugaardHaugaard02Încă nu există evaluări
- Intervalo de Calibracion TA-011Document6 paginiIntervalo de Calibracion TA-011Luis Fernando ArratiaÎncă nu există evaluări
- Laboratorio Clases en PythonDocument15 paginiLaboratorio Clases en PythonCarlos RiveroÎncă nu există evaluări
- Ud 4 Parte 4Document36 paginiUd 4 Parte 4teresaÎncă nu există evaluări
- Enunciado Del Proyecto PDFDocument5 paginiEnunciado Del Proyecto PDFINGENIERIA CONSTRUCCIONÎncă nu există evaluări
- Tarea 1.1 RLMDocument4 paginiTarea 1.1 RLMkurosaki ichigoÎncă nu există evaluări
- Secuencia Didáctica - Numeros EnterosDocument38 paginiSecuencia Didáctica - Numeros EnterosRosaura Pérez100% (3)
- Manual Puntos Basicos Localizacion Reparacion Averias Procedimiento Fases Diagnostico Evaluacion Inspeccion PDFDocument6 paginiManual Puntos Basicos Localizacion Reparacion Averias Procedimiento Fases Diagnostico Evaluacion Inspeccion PDFCarlos VidelaÎncă nu există evaluări
- BROOKS - La Amenaza FantasmaDocument153 paginiBROOKS - La Amenaza FantasmaDonald PatoÎncă nu există evaluări
- Final IA 2012-1Document8 paginiFinal IA 2012-1raged huaman cernaÎncă nu există evaluări
- Proyecto EL ARTE DE GESTIONAR EL ARTEDocument20 paginiProyecto EL ARTE DE GESTIONAR EL ARTEposibleoscarÎncă nu există evaluări
- Secret Aria DoDocument6 paginiSecret Aria DoCristhian FerruzolaÎncă nu există evaluări
- Urbanismo en Cuenca Trazas y Todo PDFDocument141 paginiUrbanismo en Cuenca Trazas y Todo PDFcarlosÎncă nu există evaluări
- El RomanticismoDocument2 paginiEl RomanticismonmsdogÎncă nu există evaluări
- Problemática en La Identificación de Residuos de DisparoDocument17 paginiProblemática en La Identificación de Residuos de DisparoANTONIOBERASTÎncă nu există evaluări
- Resumen Del Sistema Operativo WindowsDocument13 paginiResumen Del Sistema Operativo WindowsChemo Laura QuispeÎncă nu există evaluări
- Maria Paula Molino Valencia, Arte ContemporaneoDocument3 paginiMaria Paula Molino Valencia, Arte ContemporaneoMaria Paula MolinoÎncă nu există evaluări
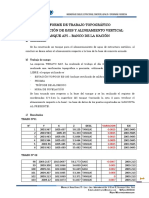
- Informe 02 - TENATO - SAC - ALINEMIENTODocument9 paginiInforme 02 - TENATO - SAC - ALINEMIENTOmiguelÎncă nu există evaluări
- Como Ser Un Lider ExitosoDocument2 paginiComo Ser Un Lider ExitosoDiegoPanchoLopezÎncă nu există evaluări
- Efectos Del Fuego Sobre Las Propiedades de Los SuelosDocument4 paginiEfectos Del Fuego Sobre Las Propiedades de Los SuelosMartina MartínezÎncă nu există evaluări