S-ar putea să vă placă și
- Thesis For Slab AnalysisDocument91 paginiThesis For Slab AnalysisAnt RagÎncă nu există evaluări
- SikaDocument8 paginiSikaPrakashÎncă nu există evaluări
- Loads For BuildingsDocument9 paginiLoads For Buildingsburntbread90Încă nu există evaluări
- Valsamis - Design Charts For Single Pile Under Lateral SpreadingDocument4 paginiValsamis - Design Charts For Single Pile Under Lateral SpreadingFederico MontesverdesÎncă nu există evaluări
- Ec9 Ex56 Compression OrthotropicDocument6 paginiEc9 Ex56 Compression OrthotropicimotalpÎncă nu există evaluări
- Chapter 2. - Second-Order Differential EquationsDocument7 paginiChapter 2. - Second-Order Differential EquationsbsitlerÎncă nu există evaluări
- Pile DesignDocument13 paginiPile DesignMohafisto SofistoÎncă nu există evaluări
- Thick Plate On Elastic FoundationDocument21 paginiThick Plate On Elastic FoundationHasanain Almusawi100% (1)
- EN1999 5 HoglundDocument79 paginiEN1999 5 HoglundPeter DudasÎncă nu există evaluări
- Analysis of A 3D FrameDocument94 paginiAnalysis of A 3D FramejaffnaÎncă nu există evaluări
- BoefDocument6 paginiBoefmetroroadÎncă nu există evaluări
- 07 Axisymmetric Finite Element ModelingDocument14 pagini07 Axisymmetric Finite Element ModelingSchubertDeierlein100% (1)
- Extracts From Ec3 For Students 2012Document6 paginiExtracts From Ec3 For Students 2012Alexandru MarincuÎncă nu există evaluări
- PDF Ch3B Couple StaticDocument43 paginiPDF Ch3B Couple StaticHaiqal AzizÎncă nu există evaluări
- INTRODUCTION (Cont..) : TIN 205-TIN31 Engineering MechanicsDocument47 paginiINTRODUCTION (Cont..) : TIN 205-TIN31 Engineering Mechanicsgundul paculÎncă nu există evaluări
- Cold Steel Designers ManualDocument73 paginiCold Steel Designers Manualearthboy2uÎncă nu există evaluări
- RaftDocument8 paginiRaftKamarajanÎncă nu există evaluări
- Microsoft Word MecvinaDocument37 paginiMicrosoft Word MecvinaRam RamirezÎncă nu există evaluări
- Unistrut Engineering DataDocument18 paginiUnistrut Engineering DatazaxaxazÎncă nu există evaluări
- A. Reading Assignment: Analysis of Members With Axial Loads and MomentsDocument19 paginiA. Reading Assignment: Analysis of Members With Axial Loads and MomentsIhab El AghouryÎncă nu există evaluări
- Bending of Curved Beam and Deflection: Qno1: Fig 1 Shows A Frame Subjected To A Load ofDocument6 paginiBending of Curved Beam and Deflection: Qno1: Fig 1 Shows A Frame Subjected To A Load ofAshok PradhanÎncă nu există evaluări
- ME421-Single Degree of Freedom System (Damped) PDFDocument13 paginiME421-Single Degree of Freedom System (Damped) PDFAli Haider RizviÎncă nu există evaluări
- Boq FormatDocument79 paginiBoq FormatacroxmassÎncă nu există evaluări
- Spreadsheets To EC2: B E B EDocument1 paginăSpreadsheets To EC2: B E B EMario Sajulga Dela CuadraÎncă nu există evaluări
- Resistance of Members To Flexural Buckling According To Eurocode 3Document95 paginiResistance of Members To Flexural Buckling According To Eurocode 3venkatasrikanthÎncă nu există evaluări
- Statics and Strength of Materials Formula SheetDocument1 paginăStatics and Strength of Materials Formula SheetRichard TsengÎncă nu există evaluări
- Beam 3Document20 paginiBeam 3MARIO MARCELOÎncă nu există evaluări
- Plastic Collapse - Beam in BendingDocument21 paginiPlastic Collapse - Beam in BendingXiangyang LuÎncă nu există evaluări
- Bending and Axial Compression With RestraintsDocument8 paginiBending and Axial Compression With RestraintsszalaijaÎncă nu există evaluări
- Shear CenterDocument8 paginiShear CenterArun BattuÎncă nu există evaluări
- Beam Column ConnectionDocument106 paginiBeam Column ConnectionAnonymous mcHqIfbnV1Încă nu există evaluări
- Sign Posts and SupportsDocument11 paginiSign Posts and SupportsIshara CoorayÎncă nu există evaluări
- Structural Steel Design Course Plan - 2015 PDFDocument7 paginiStructural Steel Design Course Plan - 2015 PDFMohamed EsamÎncă nu există evaluări
- ICTADMeasurment BillingDocument80 paginiICTADMeasurment BillingSachira PalliyaguruÎncă nu există evaluări
- USArmy 1991 - Examples - Design of Pile Foundations PDFDocument44 paginiUSArmy 1991 - Examples - Design of Pile Foundations PDFLuis Hernan TorresÎncă nu există evaluări
- Plane Stress and Plane Strain EquationDocument66 paginiPlane Stress and Plane Strain EquationRizki Amalia Tri CahyaniÎncă nu există evaluări
- TIA 1179 QnADocument2 paginiTIA 1179 QnApkphullÎncă nu există evaluări
- C E D C A E: Ollege of Ngineering Epartment of Ivil & Rchitectural NgineeringDocument27 paginiC E D C A E: Ollege of Ngineering Epartment of Ivil & Rchitectural Ngineeringhend mahmoudÎncă nu există evaluări
- IECC Residential Code OverviewDocument112 paginiIECC Residential Code Overviewbcap-oceanÎncă nu există evaluări
- MECH 321 - Solid Mechanics II Week 4, Lecture 3 Curved BeamsDocument7 paginiMECH 321 - Solid Mechanics II Week 4, Lecture 3 Curved BeamsGovind ChhawsariaÎncă nu există evaluări
- Soil ArchingDocument7 paginiSoil ArchingVignesh RajendranÎncă nu există evaluări
- Beam AnalDocument7 paginiBeam Analgercho23Încă nu există evaluări
- Load CombinationsDocument3 paginiLoad CombinationsKutty MansoorÎncă nu există evaluări
- FEM 5node 5memDocument7 paginiFEM 5node 5memmintu PatelÎncă nu există evaluări
- Passive ArchingDocument8 paginiPassive ArchingsugurpraveenÎncă nu există evaluări
- Aisc Design Examples v15.0Document2 paginiAisc Design Examples v15.0eid ibrahimÎncă nu există evaluări
- 5 - Cylinders and Vessels (Part-1)Document17 pagini5 - Cylinders and Vessels (Part-1)Rubab ZahraÎncă nu există evaluări
- Part 1Document44 paginiPart 1Carl Lemuel JavellanaÎncă nu există evaluări
- Mat Chapter 18Document29 paginiMat Chapter 18hemant_durgawaleÎncă nu există evaluări
- Gy Nju T TPDH: Khztu KD NDHB TPDHF Fs A/L2015/SFT/PhysicsDocument2 paginiGy Nju T TPDH: Khztu KD NDHB TPDHF Fs A/L2015/SFT/PhysicsSinthuNathanÎncă nu există evaluări
- Stress AnalysisDocument15 paginiStress AnalysisRed OrangeÎncă nu există evaluări
- Bending Solutions of Rectangular Thin PlatesDocument10 paginiBending Solutions of Rectangular Thin PlatesRNÎncă nu există evaluări
- Principal Stresses, Maximum Shear Stresses & Mohr's CircleDocument36 paginiPrincipal Stresses, Maximum Shear Stresses & Mohr's CircleRyanWongJiaHanÎncă nu există evaluări
- RC Plates DesignDocument7 paginiRC Plates DesignChirag N PatelÎncă nu există evaluări
- Power Series Methods of Solving Ordinary Differential EquationsDocument14 paginiPower Series Methods of Solving Ordinary Differential EquationsAlbert Wandui100% (3)
- Deflection and Buckling of LaminatesDocument33 paginiDeflection and Buckling of LaminatesfayuangÎncă nu există evaluări
- 13.ch14.transformation 22Document49 pagini13.ch14.transformation 22sidsridhar89Încă nu există evaluări
- 2.2 Volumes by Washers&Disks - NotesDocument8 pagini2.2 Volumes by Washers&Disks - NotesKelseyÎncă nu există evaluări
- Reflectores de HouseholderDocument13 paginiReflectores de HouseholderPablo BurgosÎncă nu există evaluări
- Cive162001 2006 Brief SolutionsDocument7 paginiCive162001 2006 Brief Solutionssjeyarajah21Încă nu există evaluări
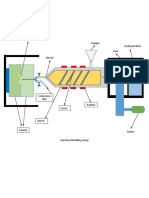
- Injection MoldingDocument1 paginăInjection MoldingAnshul SharmaÎncă nu există evaluări
- Injection Molding11Document1 paginăInjection Molding11Anshul SharmaÎncă nu există evaluări
- References: Technology, 18 (1), 42-47Document2 paginiReferences: Technology, 18 (1), 42-47Anshul SharmaÎncă nu există evaluări
- Mod SimDocument5 paginiMod SimAnshul SharmaÎncă nu există evaluări
- Robot Cell Layouts and InterlocksDocument44 paginiRobot Cell Layouts and InterlocksAnshul SharmaÎncă nu există evaluări
- Finite Element Modeling of Shell: Rajeev Kumar School of Engineering IIT MandiDocument17 paginiFinite Element Modeling of Shell: Rajeev Kumar School of Engineering IIT MandiAnshul SharmaÎncă nu există evaluări
- Annie StabDocument6 paginiAnnie StabAnshul SharmaÎncă nu există evaluări
- 28 Feb 2012Document17 pagini28 Feb 2012Anshul SharmaÎncă nu există evaluări
- 1Document2 pagini1Anshul SharmaÎncă nu există evaluări
- Lect22 Surface RoughnessDocument16 paginiLect22 Surface RoughnessAnshul SharmaÎncă nu există evaluări
- Manual PipsDocument5 paginiManual PipsOzzyÎncă nu există evaluări
- NF en Iso 5167-6-2019Document22 paginiNF en Iso 5167-6-2019Rem FgtÎncă nu există evaluări
- Napoleonic WargamingDocument13 paginiNapoleonic WargamingandyÎncă nu există evaluări
- TreesDocument69 paginiTreesADITYA GEHLAWATÎncă nu există evaluări
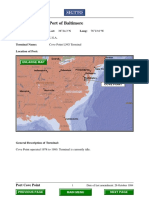
- Port Name: Port of BaltimoreDocument17 paginiPort Name: Port of Baltimoremohd1khairul1anuarÎncă nu există evaluări
- Contemporary Philippine Arts From The Regions: Quarter 2 - Module 9 Different Contemporary Art Techniques and PerformanceDocument25 paginiContemporary Philippine Arts From The Regions: Quarter 2 - Module 9 Different Contemporary Art Techniques and PerformanceGrace06 Labin100% (7)
- Kindergarten Math Problem of The Day December ActivityDocument5 paginiKindergarten Math Problem of The Day December ActivityiammikemillsÎncă nu există evaluări
- Biomedical Engineering Handbook Revised 5 2015Document37 paginiBiomedical Engineering Handbook Revised 5 2015Teja GuttiÎncă nu există evaluări
- 41z S4hana2021 Set-Up en XXDocument46 pagini41z S4hana2021 Set-Up en XXHussain MulthazimÎncă nu există evaluări
- Biology Accel Syllabus 2011-2012Document3 paginiBiology Accel Syllabus 2011-2012Mike DeleonÎncă nu există evaluări
- Indor Lighting DesignDocument33 paginiIndor Lighting DesignRajesh MalikÎncă nu există evaluări
- EXP4 The Diels Alder ReactionsDocument3 paginiEXP4 The Diels Alder ReactionsLaura GuidoÎncă nu există evaluări
- Mean Variance Portfolio TheoryDocument85 paginiMean Variance Portfolio TheoryEbenezerÎncă nu există evaluări
- Comparing Exponential NumbersDocument5 paginiComparing Exponential NumbersMaya RahayuÎncă nu există evaluări
- Plans PDFDocument49 paginiPlans PDFEstevam Gomes de Azevedo85% (34)
- Assignment 1Document3 paginiAssignment 1farhang_tÎncă nu există evaluări
- AssessmentDocument9 paginiAssessmentJuan Miguel Sapad AlpañoÎncă nu există evaluări
- NCP Orif Right Femur Post OpDocument2 paginiNCP Orif Right Femur Post OpCen Janber CabrillosÎncă nu există evaluări
- Paediatric Intake Form Modern OT 2018Document6 paginiPaediatric Intake Form Modern OT 2018SefÎncă nu există evaluări
- American BreakfastDocument4 paginiAmerican BreakfastHamilton Valenzuela ChipongianÎncă nu există evaluări
- Goliath 90 v129 eDocument129 paginiGoliath 90 v129 eerkanÎncă nu există evaluări
- Market AnalysisDocument4 paginiMarket AnalysisSaniya CharaniyaÎncă nu există evaluări
- Catalogo Aesculap PDFDocument16 paginiCatalogo Aesculap PDFHansÎncă nu există evaluări
- Biophoton RevolutionDocument3 paginiBiophoton RevolutionVyavasayaha Anita BusicÎncă nu există evaluări
- Texto EBAU 1Document2 paginiTexto EBAU 1haridianrm13Încă nu există evaluări
- World's Standard Model G6A!: Low Signal RelayDocument9 paginiWorld's Standard Model G6A!: Low Signal RelayEgiÎncă nu există evaluări
- BC-6000 Installation Guide V7.0 enDocument111 paginiBC-6000 Installation Guide V7.0 enmentule88Încă nu există evaluări
- Hydraulic Fan Speed - Test and AdjustDocument12 paginiHydraulic Fan Speed - Test and Adjustsyed ahmedÎncă nu există evaluări
- Effects of Climate ChangeDocument3 paginiEffects of Climate Changejiofjij100% (1)
- Solutions GoldsteinDocument10 paginiSolutions GoldsteinAnyiÎncă nu există evaluări