S-ar putea să vă placă și
- Networking Simulation for Intelligent Transportation Systems: High Mobile Wireless NodesDe la EverandNetworking Simulation for Intelligent Transportation Systems: High Mobile Wireless NodesBenoit HiltÎncă nu există evaluări
- Geopps: Geographical Opportunistic Routing For Vehicular NetworksDocument6 paginiGeopps: Geographical Opportunistic Routing For Vehicular NetworksPriyank ShahÎncă nu există evaluări
- A Web-Based Traffic Information System Using Wireless Communication TechniquesDocument5 paginiA Web-Based Traffic Information System Using Wireless Communication TechniquesHiron NurulÎncă nu există evaluări
- Camera Location Using GPS DataDocument10 paginiCamera Location Using GPS DataAbdhul Khadhir ShalayarÎncă nu există evaluări
- Real-Time Traffic Congestion PredictionDocument5 paginiReal-Time Traffic Congestion PredictionTutorial Storage TwoÎncă nu există evaluări
- Embedded Traffic Control System Using Wireless Ad Hoc SensorsDocument3 paginiEmbedded Traffic Control System Using Wireless Ad Hoc Sensorskoduru vasanthiÎncă nu există evaluări
- Current Routing Strategies To Adapt The Characteristics: Prof. Ananad L.MothghareDocument2 paginiCurrent Routing Strategies To Adapt The Characteristics: Prof. Ananad L.MothghareInternational Journal of computational Engineering research (IJCER)Încă nu există evaluări
- Trans Sys Chap25Document20 paginiTrans Sys Chap25Dr. Ir. R. Didin Kusdian, MT.Încă nu există evaluări
- Team 2 Smartcity Traffic ManagementDocument4 paginiTeam 2 Smartcity Traffic Managementchowdaryganesh36Încă nu există evaluări
- Review Paper On Traffic Flow Simulation On PythonDocument7 paginiReview Paper On Traffic Flow Simulation On PythonManushya is LiveÎncă nu există evaluări
- Traffic Flow Analysis With Multiple Adaptive Vehicle Detectors and Velocity Estimation With Landmark-Based ScanlinesDocument8 paginiTraffic Flow Analysis With Multiple Adaptive Vehicle Detectors and Velocity Estimation With Landmark-Based Scanlineskoushik reddyÎncă nu există evaluări
- Inter-Vehicular Communication Using Packet Network TheoryDocument7 paginiInter-Vehicular Communication Using Packet Network TheoryInternational Journal of Research in Engineering and TechnologyÎncă nu există evaluări
- UTP - Unit 4 1Document10 paginiUTP - Unit 4 1Dasarathy A KÎncă nu există evaluări
- Lecture1 MergedDocument20 paginiLecture1 Mergedrahulgoud23091Încă nu există evaluări
- Railway Track Security System Report PDFDocument26 paginiRailway Track Security System Report PDFeshu50% (2)
- Design and Implementation of Hybrid Routing Algorithm For VANETDocument5 paginiDesign and Implementation of Hybrid Routing Algorithm For VANETWARSE JournalsÎncă nu există evaluări
- Delay-Bounded Routing in Vehicular Ad-Hoc NetworksDocument10 paginiDelay-Bounded Routing in Vehicular Ad-Hoc NetworksNabeel ShahoodÎncă nu există evaluări
- Synopsis ProjectDocument10 paginiSynopsis ProjectShaman TyagiÎncă nu există evaluări
- Transportation Research Part C: Merkebe Getachew Demissie, Gonçalo Homem de Almeida Correia, Carlos BentoDocument13 paginiTransportation Research Part C: Merkebe Getachew Demissie, Gonçalo Homem de Almeida Correia, Carlos BentojoanaÎncă nu există evaluări
- Optimal Vehicle Routing With Real-Time Traffic Information: Seongmoon KimDocument31 paginiOptimal Vehicle Routing With Real-Time Traffic Information: Seongmoon KimmillatinampÎncă nu există evaluări
- Intelligent Traffic Monitoring System PDFDocument11 paginiIntelligent Traffic Monitoring System PDFMary BakhoumÎncă nu există evaluări
- Bus Tracking and Ticketing Using USSDDocument7 paginiBus Tracking and Ticketing Using USSDralf casagdaÎncă nu există evaluări
- Can Protocol Driverless Train Control SystemDocument4 paginiCan Protocol Driverless Train Control SystemInternational Journal of Research in Engineering and TechnologyÎncă nu există evaluări
- Delay Factors Modelling For Real-Time Traffic Information SystemsDocument6 paginiDelay Factors Modelling For Real-Time Traffic Information Systemsmanin1804Încă nu există evaluări
- Survey On Route Discovery Based On Congestion in Vanet (Vehicular Ad-Hoc Networks)Document3 paginiSurvey On Route Discovery Based On Congestion in Vanet (Vehicular Ad-Hoc Networks)International Journal of Application or Innovation in Engineering & ManagementÎncă nu există evaluări
- A Real-Time Tra C Signal Control System: Architecture, Algorithms, and AnalysisDocument18 paginiA Real-Time Tra C Signal Control System: Architecture, Algorithms, and Analysisapi-19757021Încă nu există evaluări
- A Broadcast Vehicle To Vehicle Communication SysteDocument7 paginiA Broadcast Vehicle To Vehicle Communication Syste다원시스Încă nu există evaluări
- Dynamic System-Optimal Traffic Assignment Using A State Space Model'Document22 paginiDynamic System-Optimal Traffic Assignment Using A State Space Model'wendersoncsdepÎncă nu există evaluări
- Metropolitan Road Traffic Simulation On FpgasDocument10 paginiMetropolitan Road Traffic Simulation On FpgasramachandraÎncă nu există evaluări
- Predicting Fine-Grained Traffic Conditions ViaDocument13 paginiPredicting Fine-Grained Traffic Conditions ViahieuhuechchÎncă nu există evaluări
- Sobre El Cálculo de Caminos Óptimos de Pareto en Ponderado 2020Document12 paginiSobre El Cálculo de Caminos Óptimos de Pareto en Ponderado 2020rafaelrojasmillanÎncă nu există evaluări
- Near Field Communication (NFC) Based Electronic Toll Collection SystemDocument7 paginiNear Field Communication (NFC) Based Electronic Toll Collection SystemFajar MubarokÎncă nu există evaluări
- Congestion Pricing That Respects "Driver Privacy"Document8 paginiCongestion Pricing That Respects "Driver Privacy"accc1100% (2)
- Intelligent Traffic Light Control System Using Morphological Edge Detection and Fuzzy LogicDocument4 paginiIntelligent Traffic Light Control System Using Morphological Edge Detection and Fuzzy LogicEstefany HuamanÎncă nu există evaluări
- Alacrity Control Using CateyeDocument5 paginiAlacrity Control Using CateyeRega RmsÎncă nu există evaluări
- Smart Traffic Signal Using Parallel Plate CapacitorDocument6 paginiSmart Traffic Signal Using Parallel Plate CapacitorInternational Journal of Application or Innovation in Engineering & ManagementÎncă nu există evaluări
- Long-Term Travel Demand Forecasting in General Dynamic Transportation NetworksDocument20 paginiLong-Term Travel Demand Forecasting in General Dynamic Transportation NetworksRufa mae BascompteÎncă nu există evaluări
- 3 Symposium On Lift and Escalator TechnologiesDocument10 pagini3 Symposium On Lift and Escalator TechnologiesfreddyjoertyÎncă nu există evaluări
- RL Paper Latex v01d01Document6 paginiRL Paper Latex v01d01Anirudh RangarajanÎncă nu există evaluări
- Mobsampling: V2V Communications For Traffic Density EstimationDocument5 paginiMobsampling: V2V Communications For Traffic Density Estimationferronatto11Încă nu există evaluări
- Railway Track Security System ReportDocument26 paginiRailway Track Security System ReportAshishNegi100% (28)
- Switching: Comparison of Virtual-Circuit andDocument2 paginiSwitching: Comparison of Virtual-Circuit andkalaÎncă nu există evaluări
- Role of GIS in Traffic EngineeringDocument6 paginiRole of GIS in Traffic EngineeringDebasmita Roy ChowdhuryÎncă nu există evaluări
- UTP Module 5Document11 paginiUTP Module 5Abdus SamadÎncă nu există evaluări
- INFORMS Is Collaborating With JSTOR To Digitize, Preserve and Extend Access To Transportation ScienceDocument21 paginiINFORMS Is Collaborating With JSTOR To Digitize, Preserve and Extend Access To Transportation ScienceAnonymous txyvmbYÎncă nu există evaluări
- Traffic SimultaionDocument12 paginiTraffic SimultaionYessyÎncă nu există evaluări
- A Certain Investigation of Smart System For Regulating Vanet Traffic With Probable Path PlanningDocument7 paginiA Certain Investigation of Smart System For Regulating Vanet Traffic With Probable Path PlanningRa muÎncă nu există evaluări
- Don't Go With The Ant Flow: Ant-Inspired Traffic Routing in Urban EnvironmentsDocument10 paginiDon't Go With The Ant Flow: Ant-Inspired Traffic Routing in Urban EnvironmentsAmina NadeemÎncă nu există evaluări
- A Framework For Adaptive Best Path Determination in Real World TrafficDocument7 paginiA Framework For Adaptive Best Path Determination in Real World TrafficUbiquitous Computing and Communication JournalÎncă nu există evaluări
- A Fastest Route Planning For LBS Based On Traffic PredictionDocument6 paginiA Fastest Route Planning For LBS Based On Traffic Predictionaku_bdgÎncă nu există evaluări
- Icect 2009 152Document5 paginiIcect 2009 152Anish ShahÎncă nu există evaluări
- A Practical Transit Network Design MethodDocument13 paginiA Practical Transit Network Design MethodVinay KorukondaÎncă nu există evaluări
- Anatomy and Efficiency of Urban Multimodal Mobility, Riccardo Galloti, 2014Document9 paginiAnatomy and Efficiency of Urban Multimodal Mobility, Riccardo Galloti, 2014garidosebastÎncă nu există evaluări
- Congestion Control in Vehicular Ad Hoc Networks: Lars Wischhof and Hermann RohlingDocument6 paginiCongestion Control in Vehicular Ad Hoc Networks: Lars Wischhof and Hermann Rohlingnithya_narmiÎncă nu există evaluări
- Iot Based Crowd Management Framework For Departure Control FinalDocument32 paginiIot Based Crowd Management Framework For Departure Control FinalArunÎncă nu există evaluări
- Traffic (Trip) AssignmentDocument13 paginiTraffic (Trip) Assignmentmonika hcÎncă nu există evaluări
- Short-Term Traffic Prediction For Edge Computing-Enhanced Autonomous and Connected CarsDocument14 paginiShort-Term Traffic Prediction For Edge Computing-Enhanced Autonomous and Connected CarsTanay KhandelwalÎncă nu există evaluări
- The DYMO Routing Protocol in VANET Scenarios: Christoph Sommer and Falko DresslerDocument5 paginiThe DYMO Routing Protocol in VANET Scenarios: Christoph Sommer and Falko Dresslersangama123Încă nu există evaluări
- Anti Collison - Fake ReportDocument40 paginiAnti Collison - Fake ReportVineet VijayanÎncă nu există evaluări
- The Development of Scalable Traffic Simulation Based On Java TechnologyDocument9 paginiThe Development of Scalable Traffic Simulation Based On Java TechnologyScreen WaverÎncă nu există evaluări
- Native VLAN and Default VLANDocument6 paginiNative VLAN and Default VLANAaliyah WinkyÎncă nu există evaluări
- Application Note An-00500: Antennas: Design, Application, PerformanceDocument7 paginiApplication Note An-00500: Antennas: Design, Application, PerformanceAnonymous 0qYv7WpgÎncă nu există evaluări
- Realtek WiFi Concurrent Mode Introduction PDFDocument5 paginiRealtek WiFi Concurrent Mode Introduction PDFRata IonÎncă nu există evaluări
- An, Improved Successive-Approximation Register Design For Use in A/D ConvertersDocument5 paginiAn, Improved Successive-Approximation Register Design For Use in A/D ConvertersOmer KhanÎncă nu există evaluări
- U16sss Inap PMDocument323 paginiU16sss Inap PMSamÎncă nu există evaluări
- Kpi RNC LevelDocument24 paginiKpi RNC LevelIan Juanda MarboenÎncă nu există evaluări
- Slides From TCP/IP - Forouzan: - Process-to-Process Communication - User Datagram - Checksum - Use of UDP - UDP DesignDocument7 paginiSlides From TCP/IP - Forouzan: - Process-to-Process Communication - User Datagram - Checksum - Use of UDP - UDP DesignDamu HameedÎncă nu există evaluări
- How To Smart Home PDF orDocument79 paginiHow To Smart Home PDF orAndrei Horhoianu100% (1)
- OCB SSP ProblemsDocument2 paginiOCB SSP ProblemsJayakrishna ReddyÎncă nu există evaluări
- VRF-Aware IPsec Using Crypto Maps and Custom FVRFDocument4 paginiVRF-Aware IPsec Using Crypto Maps and Custom FVRFUmair AlamÎncă nu există evaluări
- DS 2SF8C442MXG ELW26 - DatasheetDocument8 paginiDS 2SF8C442MXG ELW26 - DatasheetNassreddine TriguiÎncă nu există evaluări
- Amplitude Modulation: - Introduction To Modulation: - Detection of AM Signals: - Costas ReceiverDocument62 paginiAmplitude Modulation: - Introduction To Modulation: - Detection of AM Signals: - Costas ReceiverShikhar AgarwalÎncă nu există evaluări
- IPO R11 Offer Document April 2020 For Posting To Sales Portal v1.0Document131 paginiIPO R11 Offer Document April 2020 For Posting To Sales Portal v1.0Martin MottaÎncă nu există evaluări
- HW3 - Chapter 9-2Document3 paginiHW3 - Chapter 9-2Zachary MedeirosÎncă nu există evaluări
- JBoss Clustering 7Document150 paginiJBoss Clustering 7Kamakshi Raghu Kumar TekiÎncă nu există evaluări
- VLAN Trunks Notes Part 2 Cheat Sheet Network WalksDocument1 paginăVLAN Trunks Notes Part 2 Cheat Sheet Network WalksJon Carlo R. ChavezÎncă nu există evaluări
- Lab 3.3.3.2 Find Mac AddressDocument5 paginiLab 3.3.3.2 Find Mac Addressonlycisco.tkÎncă nu există evaluări
- Cisco 200 Series Smart SwitchesDocument38 paginiCisco 200 Series Smart SwitchesNikko BardeÎncă nu există evaluări
- Tender 2013-B-Ovs - 40 G 100 G DWDM Equipment - 100g MPT - Seame5 - RFP - v5Document14 paginiTender 2013-B-Ovs - 40 G 100 G DWDM Equipment - 100g MPT - Seame5 - RFP - v5Techne PhobosÎncă nu există evaluări
- BlueBox - Gentoo WikiDocument12 paginiBlueBox - Gentoo Wikiaddo_Încă nu există evaluări
- A-Faire-QCM 1 2 3Document6 paginiA-Faire-QCM 1 2 3pnz2j8677fÎncă nu există evaluări
- Radar Beacons: Racon Technical CharacteristicsDocument5 paginiRadar Beacons: Racon Technical CharacteristicshutsonianpÎncă nu există evaluări
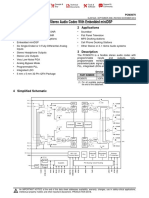
- Pcm3070 Stereo Audio Codec With Embedded Minidsp: 1 Features 2 ApplicationsDocument50 paginiPcm3070 Stereo Audio Codec With Embedded Minidsp: 1 Features 2 ApplicationsSATYAM NAIDUÎncă nu există evaluări
- C4 - Computer NetworksDocument16 paginiC4 - Computer NetworksJaymark RebosquilloÎncă nu există evaluări
- 100 KPI's For Mobile Telecom Operators Consultant Value AddedDocument10 pagini100 KPI's For Mobile Telecom Operators Consultant Value AddedVishal ChandnaniÎncă nu există evaluări
- RASP-IVR: A Low Cost Interactive Voice Response SystemDocument5 paginiRASP-IVR: A Low Cost Interactive Voice Response SystemManoj MaharjanÎncă nu există evaluări
- IP Microwave Solution - 20090617-V4Document51 paginiIP Microwave Solution - 20090617-V4Gossan Anicet100% (2)
- Lockdown DDocument19 paginiLockdown DGeorge MihailaÎncă nu există evaluări
- J - Ponuda PDFDocument8 paginiJ - Ponuda PDFAjdin Herc AhmetovicÎncă nu există evaluări
- NGT Transceiver Reference Manual - ENDocument427 paginiNGT Transceiver Reference Manual - ENMarcus0% (1)