S-ar putea să vă placă și
- Tarea#4 - Ejemplo de CompensadoresDocument30 paginiTarea#4 - Ejemplo de CompensadoresFrancisco Xavier Sevilla R.50% (2)
- Laboratorio OTADocument6 paginiLaboratorio OTAJuan Carlos PintoÎncă nu există evaluări
- 02 Impedancia Propia DipolosDocument33 pagini02 Impedancia Propia DipolosgrawfÎncă nu există evaluări
- Investigacion Fan In, Fan Out y Totem PoleDocument4 paginiInvestigacion Fan In, Fan Out y Totem PoleDANIELA SAMBONI PACHECOÎncă nu există evaluări
- Banderas AVR MicrocontroladorDocument3 paginiBanderas AVR MicrocontroladorAlejandro Colorado100% (1)
- 3-Discretizacion de Una Funcion ContinuaDocument2 pagini3-Discretizacion de Una Funcion ContinuaÓscar RiveraÎncă nu există evaluări
- Taller 2Document2 paginiTaller 2api-3711530Încă nu există evaluări
- PDF Demodulador FSK Con PLL DDDocument3 paginiPDF Demodulador FSK Con PLL DDAndres TolozaÎncă nu există evaluări
- Simulación analógica de un sistema linealDocument7 paginiSimulación analógica de un sistema linealIVAN ALONSO CCAHUACHIA LETONAÎncă nu există evaluări
- El Contador en AnilloDocument14 paginiEl Contador en AnilloJosé GuachoÎncă nu există evaluări
- Taller II CorteDocument2 paginiTaller II Cortemauro ibarraÎncă nu există evaluări
- Práctica 3 Trasformada Z InversaDocument2 paginiPráctica 3 Trasformada Z InversaIsmael PanchiÎncă nu există evaluări
- Informe-Modulacion Por Ancho de PulsoDocument10 paginiInforme-Modulacion Por Ancho de PulsoCristianQuispeVenturaÎncă nu există evaluări
- Informe 1 - Muestreadores y RetenedoresDocument15 paginiInforme 1 - Muestreadores y RetenedoresAmael Chacon RodriguezÎncă nu există evaluări
- Ecualizador de 5 bandasDocument8 paginiEcualizador de 5 bandasJ Carlos VanegasÎncă nu există evaluări
- Espectro Mediante SimulinkDocument39 paginiEspectro Mediante SimulinkJuan Carlos Zamora CorillaÎncă nu există evaluări
- Filtros Activos de Orden SuperiorDocument6 paginiFiltros Activos de Orden SuperiorKeyla VillalvaÎncă nu există evaluări
- TroceadoresDocument20 paginiTroceadoresAmilcar Alvarez PeraltaÎncă nu există evaluări
- Filtros Segundo OrdenDocument4 paginiFiltros Segundo OrdenlfernandaceÎncă nu există evaluări
- Ejercicios. Eo. III. TiristorDocument3 paginiEjercicios. Eo. III. TiristorLunaWildmann0% (1)
- Practica 1 Polarizacion FET 1Document11 paginiPractica 1 Polarizacion FET 1Ma-Elisa EscobarÎncă nu există evaluări
- Diseño y caracterización de un balun de λ/2Document2 paginiDiseño y caracterización de un balun de λ/2authorÎncă nu există evaluări
- Diagramas P&id PDFDocument22 paginiDiagramas P&id PDFhugoÎncă nu există evaluări
- Troceador de Un CuadranteDocument28 paginiTroceador de Un CuadranteKaro Pand FloresÎncă nu există evaluări
- Laboratorio Avance Lab 7Document15 paginiLaboratorio Avance Lab 7Roderick CervantesÎncă nu există evaluări
- CMOS circuitos familiaDocument9 paginiCMOS circuitos familiaPaul R. ZamudioÎncă nu există evaluări
- Laboratorio3 Respuesta TransitoriaDocument15 paginiLaboratorio3 Respuesta TransitoriaMiguel CorreaÎncă nu există evaluări
- Ulaby-Ejemplo 6.1 Ejercios 6.1 y 6.2Document2 paginiUlaby-Ejemplo 6.1 Ejercios 6.1 y 6.2Andres PerezÎncă nu există evaluări
- Práctica 09 - UJAP 2015-1 Generador de Onda CuadradaDocument2 paginiPráctica 09 - UJAP 2015-1 Generador de Onda Cuadradagian franco lo piparoÎncă nu există evaluări
- Informe Lab4 3817 Barreno Herrera Montenegro PDFDocument28 paginiInforme Lab4 3817 Barreno Herrera Montenegro PDFMikael MontenegroÎncă nu există evaluări
- Choper DC de Un CuadranteDocument8 paginiChoper DC de Un CuadrantePablo AmbrosiÎncă nu există evaluări
- Obtención Del Modelo Matemático Del Convertidor BuckDocument7 paginiObtención Del Modelo Matemático Del Convertidor BuckAngie BarbosaÎncă nu există evaluări
- Actividad 5. Control de Puerta de Horno Con Vavulas 4-3Document3 paginiActividad 5. Control de Puerta de Horno Con Vavulas 4-3Heber Arias leonÎncă nu există evaluări
- Señales y Sistemas de Comunicación Analógica y Digital - Manual de SolucionesDocument73 paginiSeñales y Sistemas de Comunicación Analógica y Digital - Manual de SolucionesDcuevase1Încă nu există evaluări
- Laboratorio2 MEDIA DE VALOR MEDIO Y EFICAZDocument16 paginiLaboratorio2 MEDIA DE VALOR MEDIO Y EFICAZAngel MejiaÎncă nu există evaluări
- Funciones de Transferencia ProyectoDocument8 paginiFunciones de Transferencia ProyectoRübi AlexapehÎncă nu există evaluări
- Ejercicios Con Fuentes de Alimentacion FijaDocument17 paginiEjercicios Con Fuentes de Alimentacion FijaJuan Carlos Rosales EscobarÎncă nu există evaluări
- Transformador Lambda/4Document5 paginiTransformador Lambda/4Carlos VenegasÎncă nu există evaluări
- Diseño Del Amplificador Con BJT 2N3904Document4 paginiDiseño Del Amplificador Con BJT 2N3904Omar ChirinosÎncă nu există evaluări
- Ema215 Examen4 2018 SoluciónDocument3 paginiEma215 Examen4 2018 SoluciónCristian Aguilar QuintanillaÎncă nu există evaluări
- Laboratorio #3. Respuesta Transitoria y Estacionaria.Document6 paginiLaboratorio #3. Respuesta Transitoria y Estacionaria.Renzo GutiérrezÎncă nu există evaluări
- Ejercicios Conversion AdcDocument2 paginiEjercicios Conversion AdcJessica Lorena Forero Castro100% (1)
- Ejercicios Del Capítulo VIIDocument2 paginiEjercicios Del Capítulo VIIalonso vargasÎncă nu există evaluări
- Integral de InversionDocument3 paginiIntegral de InversionPolChris ChasiÎncă nu există evaluări
- Problemas Propuestos 2018-2Document4 paginiProblemas Propuestos 2018-2Jhoelito KennedyÎncă nu există evaluări
- Diagrama de BodeDocument5 paginiDiagrama de Bodefranklin9427Încă nu există evaluări
- Ps2320 Problemas Resueltos Bode NyquistDocument4 paginiPs2320 Problemas Resueltos Bode NyquistJuan Rossel HUÎncă nu există evaluări
- Control Por Realimentación de Estados Del Motor DCDocument11 paginiControl Por Realimentación de Estados Del Motor DCMilo VanvanÎncă nu există evaluări
- Rectificador monofásico semi-controlado: operación, cálculo de tensiones, corrientes, potencia y THDDocument20 paginiRectificador monofásico semi-controlado: operación, cálculo de tensiones, corrientes, potencia y THDSANTIAGO FELIPE ARIZA LONDONOÎncă nu există evaluări
- Preparatorio1.1 Grupo3 8560Document14 paginiPreparatorio1.1 Grupo3 8560Luis Adrian Camacho100% (2)
- P1 Ejercicio G 2Document5 paginiP1 Ejercicio G 2luciaÎncă nu există evaluări
- Componentes Pasivos en Alta FrecuenciaDocument26 paginiComponentes Pasivos en Alta FrecuenciaIsmael Arias InostrozaÎncă nu există evaluări
- Control Por Realimentacion de EstadosDocument44 paginiControl Por Realimentacion de EstadosJose FonsecaÎncă nu există evaluări
- Solucion - EXAMEN FINAL DE CONTROL DIGITALDocument5 paginiSolucion - EXAMEN FINAL DE CONTROL DIGITALJuan Manuel VargasÎncă nu există evaluări
- Automatización de Un Proceso de Mezclado (Cementera)Document8 paginiAutomatización de Un Proceso de Mezclado (Cementera)BladimirHidalgôÎncă nu există evaluări
- Rectificadores Monofasicos Carga RLDocument43 paginiRectificadores Monofasicos Carga RLAlejandra Ochoa SÎncă nu există evaluări
- Diseño de Controladores Digitales - DeadbeatDocument8 paginiDiseño de Controladores Digitales - DeadbeatFelipe MoreraÎncă nu există evaluări
- Generador de onda diente de sierra con amplificadores operacionalesDocument3 paginiGenerador de onda diente de sierra con amplificadores operacionalesHernán LeónÎncă nu există evaluări
- Diseno Analitico de ControladoresDocument18 paginiDiseno Analitico de ControladoresJohn RodriguezÎncă nu există evaluări
- Guia 1 Z-2019Document15 paginiGuia 1 Z-2019Nikole BaezÎncă nu există evaluări
- ClaroDocument3 paginiClaropoloÎncă nu există evaluări
- Catalogo de Insumos Agosto 2021 - Sublimake PeruDocument13 paginiCatalogo de Insumos Agosto 2021 - Sublimake Peruelmer gonzalezÎncă nu există evaluări
- Historia de Los VideojuegosDocument16 paginiHistoria de Los VideojuegosGabriel MoralesÎncă nu există evaluări
- Conexión Del PLC RSlogix 1100 Serie BDocument21 paginiConexión Del PLC RSlogix 1100 Serie BEvan AV0% (1)
- Formación profesional centros MadridDocument746 paginiFormación profesional centros MadridchaisaritaÎncă nu există evaluări
- Modelo RelacionalDocument16 paginiModelo RelacionalAinhoa_SÎncă nu există evaluări
- Postgresql ExpoDocument14 paginiPostgresql Expojhoselyn jara espinozaÎncă nu există evaluări
- Transformacion Del Grupo Lego para La Economia DigitalDocument7 paginiTransformacion Del Grupo Lego para La Economia DigitalDalia Liliana Torres LimasÎncă nu există evaluări
- Investigacion 1 Delitos InformaticosDocument12 paginiInvestigacion 1 Delitos InformaticosIvan de la Cruz100% (1)
- Transistor MOSFET Caracterización y Aplicaciones Básicas.Document7 paginiTransistor MOSFET Caracterización y Aplicaciones Básicas.saor117100% (1)
- (RSH) - Paso A Paso - UMTS+LTE SHARING 1900 - v3 - AMDocument39 pagini(RSH) - Paso A Paso - UMTS+LTE SHARING 1900 - v3 - AMJuancho SilvaÎncă nu există evaluări
- Clases VB - Net Oroya 2017Document48 paginiClases VB - Net Oroya 2017Mariana PendeivisÎncă nu există evaluări
- A3 RRCM1Document17 paginiA3 RRCM1Rey CastilloÎncă nu există evaluări
- Guia Rapida Mega ESPDocument43 paginiGuia Rapida Mega ESPMJZEÎncă nu există evaluări
- Total TrabajoDocument15 paginiTotal TrabajoJosé Humberto Ramos MéndezÎncă nu există evaluări
- Árbol de FallasDocument4 paginiÁrbol de FallasNallely HernandezÎncă nu există evaluări
- Manual Prácticas DSE 2020 PDFDocument63 paginiManual Prácticas DSE 2020 PDFCesar SanchezÎncă nu există evaluări
- Inteligencia ArtificialDocument13 paginiInteligencia ArtificialJuan Luis Ramírez SánchezÎncă nu există evaluări
- Enrutamiento Dinámico EIGRPDocument7 paginiEnrutamiento Dinámico EIGRPHector AmayaÎncă nu există evaluări
- Estimación de tiempos y probabilidad de finalización de proyectoDocument5 paginiEstimación de tiempos y probabilidad de finalización de proyectojulianenriquecalixtoÎncă nu există evaluări
- Estrategias de Seguimiento Al ClienteDocument1 paginăEstrategias de Seguimiento Al Clientecremas2006Încă nu există evaluări
- Colores CuboDocument22 paginiColores CuboOlby Algarañaz JustinianoÎncă nu există evaluări
- Unidad 1 - TPIDADocument30 paginiUnidad 1 - TPIDADepartamento EEÎncă nu există evaluări
- Solucion Actividad 1Document8 paginiSolucion Actividad 1Paola Andrea Galeano Martinez100% (3)
- Ventajas y desventajas de la automatizaciónDocument4 paginiVentajas y desventajas de la automatizaciónTOMAS ESTEBAN ESPEJO CUEVAÎncă nu există evaluări
- Comandos para Sketchup JGDocument3 paginiComandos para Sketchup JGSooyAngieeÎncă nu există evaluări
- De Las Vacas Sagradas Se Hacen Las Mejores HamburguesasDocument24 paginiDe Las Vacas Sagradas Se Hacen Las Mejores HamburguesasEduardo PlÎncă nu există evaluări
- Caso Practico U2Document3 paginiCaso Practico U2Ruberney VelezÎncă nu există evaluări
- Codigo RN PHPDocument15 paginiCodigo RN PHPCarlos Orlando Claros VásquezÎncă nu există evaluări
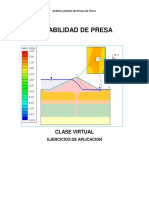
- PresasDocument14 paginiPresasbetoaranoÎncă nu există evaluări