S-ar putea să vă placă și
- Diagramas y Polifonías. Experiencias de PensamientoDe la EverandDiagramas y Polifonías. Experiencias de PensamientoÎncă nu există evaluări
- Princiopio de Cavalieri para Hallar El Área de Un Cilindro Circular OblicuoDocument4 paginiPrinciopio de Cavalieri para Hallar El Área de Un Cilindro Circular Oblicuocarlitos9210100% (2)
- Tema 2. Cinemática Del Sólido RígidoDocument53 paginiTema 2. Cinemática Del Sólido RígidoAustinÎncă nu există evaluări
- Esfera de RiemannDocument4 paginiEsfera de RiemannGiorgio RevecoÎncă nu există evaluări
- 20111sicf006952 1Document6 pagini20111sicf006952 1GabyValladolidÎncă nu există evaluări
- 2º Informe Fisica IIIDocument11 pagini2º Informe Fisica IIIegodi00009Încă nu există evaluări
- Luctuala Taller 3,6Document1 paginăLuctuala Taller 3,6Mireya LuctualaÎncă nu există evaluări
- Aplicacion Del Calculo Vectorial Puente Pueblo ViejoDocument5 paginiAplicacion Del Calculo Vectorial Puente Pueblo ViejoDom LagunasÎncă nu există evaluări
- Tensor Métrico - Wikipedia, La Enciclopedia LibreDocument21 paginiTensor Métrico - Wikipedia, La Enciclopedia LibreFranklin MarchettiÎncă nu există evaluări
- Coordenadas Esferoidales AlargadasDocument4 paginiCoordenadas Esferoidales Alargadashector mayorgaÎncă nu există evaluări
- 3°#movimiento RelativoDocument5 pagini3°#movimiento Relativoteradata059129100% (1)
- La Ecuaión de Calor de FourierDocument25 paginiLa Ecuaión de Calor de FourierJonathan TiteÎncă nu există evaluări
- Teorema Cantor BernsteinDocument8 paginiTeorema Cantor BernsteinvicentÎncă nu există evaluări
- El PlanímetroDocument13 paginiEl PlanímetroOmar CariÎncă nu există evaluări
- Física 2 Versión 2011 Mejorada, Capitulo 1 ElasticidadDocument45 paginiFísica 2 Versión 2011 Mejorada, Capitulo 1 ElasticidadHugo Medina Guzmán67% (3)
- Caso de EstudIo I - ESTA 2020-2Document5 paginiCaso de EstudIo I - ESTA 2020-2macaÎncă nu există evaluări
- Notas de Clase Lógica 2020A PDFDocument67 paginiNotas de Clase Lógica 2020A PDFJuan Diego Montenegro100% (1)
- Parbola 140331152158 Phpapp02Document37 paginiParbola 140331152158 Phpapp02Cinthya VargasÎncă nu există evaluări
- Levantamiento Con TeodolitoDocument16 paginiLevantamiento Con TeodolitoIzquierdo Alaya BeronicaÎncă nu există evaluări
- Cuarta Practica Califivada de Fisica I UcpDocument2 paginiCuarta Practica Califivada de Fisica I UcpClaritaAnguloÎncă nu există evaluări
- Deducción de La Formula de BernullyDocument3 paginiDeducción de La Formula de BernullyCristhianCoyoÎncă nu există evaluări
- Ligaduras No Holonomas y Fuerzas de LigaduraDocument3 paginiLigaduras No Holonomas y Fuerzas de LigaduraGerman MiguelÎncă nu există evaluări
- Momento de Inercia Un Poco CorregidaDocument32 paginiMomento de Inercia Un Poco Corregidaroyer manayayÎncă nu există evaluări
- Mecanica NewtonianaDocument13 paginiMecanica NewtonianaMarco Saw0% (1)
- Guia de Relatividad I Del 2 2018 PDFDocument4 paginiGuia de Relatividad I Del 2 2018 PDFJohn MedinaÎncă nu există evaluări
- Movimiento CurvilineoDocument3 paginiMovimiento CurvilineoFlakis Aguilar43% (7)
- Vectores en R3-2Document1 paginăVectores en R3-2yonatan flores cayllahuaÎncă nu există evaluări
- Dos Esferas Conductoras ConectadasDocument4 paginiDos Esferas Conductoras Conectadasgarfacio30Încă nu există evaluări
- Ejercicios de Segunda Ley de Newton Sin RozamientoDocument17 paginiEjercicios de Segunda Ley de Newton Sin RozamientoSpeaker Hifi100% (1)
- Coordenadas PolaresDocument11 paginiCoordenadas PolaresPaulina CalvilloÎncă nu există evaluări
- YoyoDocument8 paginiYoyoOscar Alfonso Sandoval SaenzÎncă nu există evaluări
- Guía de Aprendizaje 04 - Dinámica PDFDocument26 paginiGuía de Aprendizaje 04 - Dinámica PDFQuispe Espinoza ChristianÎncă nu există evaluări
- Trabajo de Calculo DiferencialDocument12 paginiTrabajo de Calculo Diferencialtattan GutierrezÎncă nu există evaluări
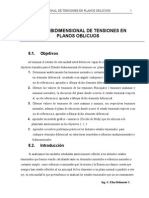
- Texto de Planos Oblicuos 3Document14 paginiTexto de Planos Oblicuos 3Junior VieiraÎncă nu există evaluări
- JejeDocument30 paginiJejePamelaQuevedoÎncă nu există evaluări
- Covarianza y ContravarianzaDocument7 paginiCovarianza y ContravarianzaAngela María SucasacaÎncă nu există evaluări
- 4 ElipseDocument7 pagini4 ElipseCésar David Aguilera RojasÎncă nu există evaluări
- Sustitutorio203-9 2Document3 paginiSustitutorio203-9 2Leandro Bustíos SánchezÎncă nu există evaluări
- Banco - CCR 2dDocument5 paginiBanco - CCR 2dGian Franco Sedano RomeroÎncă nu există evaluări
- Solucionario de ExamenDocument17 paginiSolucionario de ExamenJosé Antonio Quispealaya HernándezÎncă nu există evaluări
- Estructuras Ii SubirDocument33 paginiEstructuras Ii SubirOSCAR OLMOSÎncă nu există evaluări
- Cinemática-MruDocument3 paginiCinemática-MruGustavo Huaman VilchezÎncă nu există evaluări
- Formulario de Resistencia de Los MaterialesDocument16 paginiFormulario de Resistencia de Los MaterialesYeSy IreneÎncă nu există evaluări
- Guia 7 Torque EstaticaDocument3 paginiGuia 7 Torque EstaticaFernanda Mendez Salcedo100% (1)
- Método de Conservación de AzimutDocument8 paginiMétodo de Conservación de AzimutallanÎncă nu există evaluări
- Teoria Diagonalizacion de MatricesDocument9 paginiTeoria Diagonalizacion de MatricesRaúl Romero TámaraÎncă nu există evaluări
- Resumen de Beer & JohnstonDocument10 paginiResumen de Beer & JohnstonEduardo Murillo0% (1)
- Aplicaciones de Ecuaciones Diferenciales en Ingeniería CivilDocument13 paginiAplicaciones de Ecuaciones Diferenciales en Ingeniería CivilJhohan Zuniga PimentelÎncă nu există evaluări
- Valdivia Fernando. CONIC2009 Diseno y Construccion ToboganDocument6 paginiValdivia Fernando. CONIC2009 Diseno y Construccion ToboganFernando ValdiviaÎncă nu există evaluări
- CUESTIONARIODocument2 paginiCUESTIONARIOMarisol Palomino PalominoÎncă nu există evaluări
- Taller MRUDocument2 paginiTaller MRUSantiago EspinalÎncă nu există evaluări
- Deduccion Del Efecto DopplerDocument32 paginiDeduccion Del Efecto DopplerFreddy Lp Robles100% (1)
- Capitulo 1 Elasticidad 2015 1Document78 paginiCapitulo 1 Elasticidad 2015 1RENZO RENATO VELASQUEZ LOLIÎncă nu există evaluări
- Tarea de C. Var. Variab.Document6 paginiTarea de C. Var. Variab.otakunÎncă nu există evaluări
- Ejercicio de Movimiento Relativo y Sist No InercialesDocument6 paginiEjercicio de Movimiento Relativo y Sist No InercialesGuadalupeÎncă nu există evaluări
- Trabajo de Coordenadas EsféricasDocument12 paginiTrabajo de Coordenadas EsféricasJuan Antonio Bardales MioÎncă nu există evaluări
- Mecanica Tecnica CinematicaDocument8 paginiMecanica Tecnica CinematicaNicolás SánchezÎncă nu există evaluări
- Ecuaciones de Movimiento 1Document14 paginiEcuaciones de Movimiento 1Luis Huaman QuispeÎncă nu există evaluări
- Cinematica Tridimensional de Cuerpo RigidoDocument12 paginiCinematica Tridimensional de Cuerpo RigidoMarcoMoncayoÎncă nu există evaluări
- Calculo de Curvas HorizontalesDocument1 paginăCalculo de Curvas Horizontalesyayumeco27Încă nu există evaluări
- Correccion Analitica de Angulos y Longitud en CuadrilateroDocument6 paginiCorreccion Analitica de Angulos y Longitud en Cuadrilaterofk_99Încă nu există evaluări
- Calculo de Curvas HorizontalesDocument1 paginăCalculo de Curvas Horizontalesyayumeco27Încă nu există evaluări
- Coordenadas Esféricas y TransformacionesDocument4 paginiCoordenadas Esféricas y TransformacionesDeivid Vander VÎncă nu există evaluări
- Guia de Trabajo No. 4Document3 paginiGuia de Trabajo No. 4Juan Pablo MazariegosÎncă nu există evaluări
- AdaDocument45 paginiAdaCristian EmersonÎncă nu există evaluări
- Vag-Com en Audi A4 B8Document70 paginiVag-Com en Audi A4 B8Polin perezÎncă nu există evaluări
- PLANIFICACIÓN UNIDAD 2 Orientación 2° AñoDocument3 paginiPLANIFICACIÓN UNIDAD 2 Orientación 2° AñoFamilia Obligado-aldoneyÎncă nu există evaluări
- Resumen DG 2018 Final 1.1Document93 paginiResumen DG 2018 Final 1.1destructor 03Încă nu există evaluări
- Curriculo NacionalDocument15 paginiCurriculo NacionalBranh QuispÎncă nu există evaluări
- Manual de Gramática Histórica Griega 4 (Sirac)Document616 paginiManual de Gramática Histórica Griega 4 (Sirac)ArghetlamÎncă nu există evaluări
- Algoritmo ARIESDocument11 paginiAlgoritmo ARIESnetfranÎncă nu există evaluări
- El Servicio Al Cliente Y L A Productividad en Los Casinos de La Empresa Inversiones Texano Sac, 2019Document16 paginiEl Servicio Al Cliente Y L A Productividad en Los Casinos de La Empresa Inversiones Texano Sac, 2019NewtÎncă nu există evaluări
- Orden y Limpieza en El Punto de VentaDocument5 paginiOrden y Limpieza en El Punto de VentaMatías Koxi KoxiÎncă nu există evaluări
- Fenomeno de AliasingDocument4 paginiFenomeno de AliasingJohana LaglaÎncă nu există evaluări
- Estudio Dinámico de Los EngranesDocument11 paginiEstudio Dinámico de Los EngranesJorge CastilloÎncă nu există evaluări
- Informe Laboratorio 1 RIESGO ELECTRICODocument2 paginiInforme Laboratorio 1 RIESGO ELECTRICOEfrén ParraÎncă nu există evaluări
- Planificacion Estrategica y OperativaDocument204 paginiPlanificacion Estrategica y OperativaDiego Perez TrinidadÎncă nu există evaluări
- Aplicación de Las TelecomunicacionesDocument48 paginiAplicación de Las TelecomunicacionesFaustino NitoÎncă nu există evaluări
- Aceite API Cj-4Document17 paginiAceite API Cj-4Emanuel SepulvedaÎncă nu există evaluări
- Presentación General CROPWATDocument72 paginiPresentación General CROPWATCarlos MestasÎncă nu există evaluări
- Mario - Urrutia - Controls4 GPDocument4 paginiMario - Urrutia - Controls4 GPmario eduardo urrutia sanzana100% (1)
- Oribe Yosep Encofrados Metálicos ConstrucciónDocument95 paginiOribe Yosep Encofrados Metálicos ConstrucciónJonathan Torres HÎncă nu există evaluări
- Mapa Mental AuditoriaDocument7 paginiMapa Mental AuditoriaLuz Marina NiñoÎncă nu există evaluări
- Fono 011 Evaluacion Del Procesamiento Linguistico en La Afasia EPLADocument2 paginiFono 011 Evaluacion Del Procesamiento Linguistico en La Afasia EPLASilverhalfÎncă nu există evaluări
- Reseña CríticaDocument11 paginiReseña CríticajavieraÎncă nu există evaluări
- Cómo Se Desarrolla La Investigación en La UpelDocument2 paginiCómo Se Desarrolla La Investigación en La UpelCARLOS DIAZÎncă nu există evaluări
- Lesiones Por Arma BlancaDocument9 paginiLesiones Por Arma Blancaapi-396943786Încă nu există evaluări
- Trabajo Colaborativo Paso 2 Grupo 403032 137Document15 paginiTrabajo Colaborativo Paso 2 Grupo 403032 137Rosa Victoria Martinez MorilloÎncă nu există evaluări
- Agua SubterraneasDocument34 paginiAgua SubterraneasCarlos AlvarezÎncă nu există evaluări
- Obligaciones CondicionalesDocument13 paginiObligaciones CondicionalesStephany LongartÎncă nu există evaluări
- Modelo de Negocio SpsDocument3 paginiModelo de Negocio SpsEGNA JULIETH ZAMORA OROZCOÎncă nu există evaluări
- Criptografia Entrega 1Document7 paginiCriptografia Entrega 1patricia rodriguezÎncă nu există evaluări
- Las Barreras Psicológicas de La ComunicacionDocument2 paginiLas Barreras Psicológicas de La ComunicacionJulio Eduardo Loayza BeltranÎncă nu există evaluări