S-ar putea să vă placă și
- Ahogador o ChokeDocument1 paginăAhogador o ChokeRonaldo Maldonado100% (2)
- Exposicion en Gestion de La CalidadDocument40 paginiExposicion en Gestion de La CalidadJose Hernandez100% (1)
- Interaccion Humano ComputadorDocument18 paginiInteraccion Humano ComputadorCesar MoncadaÎncă nu există evaluări
- Motor Electrico en AgriculturaDocument15 paginiMotor Electrico en AgriculturaJocsan Urbina0% (1)
- Manual Inscripcion CentroIdiomas v1Document12 paginiManual Inscripcion CentroIdiomas v1litman ALVA VELAÎncă nu există evaluări
- 2 - Nómina para 2da - Recuperación 2020-IDocument12 pagini2 - Nómina para 2da - Recuperación 2020-ImarimarthaÎncă nu există evaluări
- Como Programar Un PLC Allen Bradley Con RSlogix5000Document8 paginiComo Programar Un PLC Allen Bradley Con RSlogix5000Julián Aquiles TabordaÎncă nu există evaluări
- Catálogo de RecambiosDocument112 paginiCatálogo de RecambiosEurotrucks SasÎncă nu există evaluări
- ExcelDocument24 paginiExcelKatherine Rojas ValenciaÎncă nu există evaluări
- Pia VentasDocument16 paginiPia VentasBrandon Nava OchoaÎncă nu există evaluări
- InformeDocument8 paginiInformeCuenta SecundariaÎncă nu există evaluări
- Cisco Ccna Curso 8-04-2020Document74 paginiCisco Ccna Curso 8-04-2020robertominchalaÎncă nu există evaluări
- Clasificación y Reciclaje de Latas de Aluminio yDocument11 paginiClasificación y Reciclaje de Latas de Aluminio yAndrea LorenaaÎncă nu există evaluări
- Instrumental Sísmico y Medio AmbienteDocument6 paginiInstrumental Sísmico y Medio AmbienteLitzy A. Reyes OlánÎncă nu există evaluări
- Juicio en LineaDocument16 paginiJuicio en LineaGuadalupe Martinez100% (1)
- Simulador Solar Con FlashDocument58 paginiSimulador Solar Con FlashjjgaldosÎncă nu există evaluări
- Las TIC en Empresas VenezolanasDocument12 paginiLas TIC en Empresas VenezolanasClaudia Romero100% (1)
- Guía de Actividades y Rúbrica de Evaluación - Paso 1 - Diagnóstico de Necesidades de AprendizajeDocument6 paginiGuía de Actividades y Rúbrica de Evaluación - Paso 1 - Diagnóstico de Necesidades de AprendizajeJavier Eduardo Morales MelgarÎncă nu există evaluări
- Construye Un Repelente Electrónico de Mosquitos - NeoTeoDocument3 paginiConstruye Un Repelente Electrónico de Mosquitos - NeoTeoCacheroso OkÎncă nu există evaluări
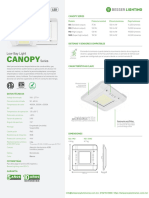
- Ficha Tecnica Canopy LEDDocument2 paginiFicha Tecnica Canopy LEDjennifer24cvÎncă nu există evaluări
- Reservas GlobalesDocument29 paginiReservas GlobalesGiu Soto100% (1)
- Presentación Honor X9Document5 paginiPresentación Honor X9Renzo Hideaky Nakayo IbáñezÎncă nu există evaluări
- Cap 24 FresadoDocument36 paginiCap 24 FresadoAlisia CamposÎncă nu există evaluări
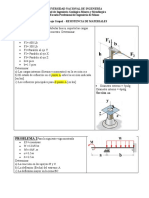
- PC4 - RM - 2023-01 GrupalDocument3 paginiPC4 - RM - 2023-01 GrupalFRANCIS DAVID CABREJOS RAMOSÎncă nu există evaluări
- JSERA Presentacion de BombaDocument1 paginăJSERA Presentacion de BombaGab BseÎncă nu există evaluări
- Brochure EATONDocument8 paginiBrochure EATONJohan Mateo Cantor TorresÎncă nu există evaluări
- Tarea #Iii - Ingenieria Del ProyectoDocument3 paginiTarea #Iii - Ingenieria Del ProyectoSebastian Solis MirandaÎncă nu există evaluări
- Diseno Hidraulico de Un Sifon InvertidoDocument12 paginiDiseno Hidraulico de Un Sifon InvertidoJhonatan Burgos100% (1)
- Presentaciones de Sensores y ActuadoresDocument54 paginiPresentaciones de Sensores y ActuadoresfelipeÎncă nu există evaluări
- Invoice ConocidoDocument8 paginiInvoice ConocidoMarlon Andrés Rueda CarreñoÎncă nu există evaluări