S-ar putea să vă placă și
- Difference Equations in Normed Spaces: Stability and OscillationsDe la EverandDifference Equations in Normed Spaces: Stability and OscillationsÎncă nu există evaluări
- Chap7 Random ProcessDocument21 paginiChap7 Random ProcessSeham RaheelÎncă nu există evaluări
- Random ProcessDocument21 paginiRandom ProcessgkmkkÎncă nu există evaluări
- Stochastic Processes Lecture on Random Variables and SLLNDocument8 paginiStochastic Processes Lecture on Random Variables and SLLNomidbundyÎncă nu există evaluări
- GMM Estimation PDFDocument35 paginiGMM Estimation PDFdamian camargoÎncă nu există evaluări
- CH 00Document4 paginiCH 00Wai Kit LeongÎncă nu există evaluări
- MIT LECTURE ON DISCRETE RANDOM VARIABLESDocument18 paginiMIT LECTURE ON DISCRETE RANDOM VARIABLESSarvraj Singh RtÎncă nu există evaluări
- Instructor: DR - Saleem AL Ashhab Al Ba'At University Mathmatical Class Second Year Master DgreeDocument13 paginiInstructor: DR - Saleem AL Ashhab Al Ba'At University Mathmatical Class Second Year Master DgreeNazmi O. Abu JoudahÎncă nu există evaluări
- Lab PDFDocument11 paginiLab PDFaliÎncă nu există evaluări
- Mathematical Economics: 1 What To StudyDocument23 paginiMathematical Economics: 1 What To Studyjrvv2013gmailÎncă nu există evaluări
- Statistics Boot Camp: X F X X E DX X XF X E Important Properties of The Expectations OperatorDocument3 paginiStatistics Boot Camp: X F X X E DX X XF X E Important Properties of The Expectations OperatorHerard NapuecasÎncă nu există evaluări
- 3.0 ErrorVar and OLSvar-1Document42 pagini3.0 ErrorVar and OLSvar-1Malik MahadÎncă nu există evaluări
- Lab 7 BDocument7 paginiLab 7 Bapi-3826899Încă nu există evaluări
- How Are Rao-Blackwell Estimators "Better"?Document2 paginiHow Are Rao-Blackwell Estimators "Better"?Selva KumarÎncă nu există evaluări
- X (X X - . - . - . - . - X) : Neuro-Fuzzy Comp. - Ch. 3 May 24, 2005Document20 paginiX (X X - . - . - . - . - X) : Neuro-Fuzzy Comp. - Ch. 3 May 24, 2005Oluwafemi DagunduroÎncă nu există evaluări
- Class6 Prep ADocument7 paginiClass6 Prep AMariaTintashÎncă nu există evaluări
- Generating Random VariablesDocument7 paginiGenerating Random VariablesTsvetanÎncă nu există evaluări
- MIT6 436JF18 Lec06Document18 paginiMIT6 436JF18 Lec06DevendraReddyPoreddyÎncă nu există evaluări
- Week 2 NotesDocument23 paginiWeek 2 NotesHind OuazzaniÎncă nu există evaluări
- HMWK 4Document5 paginiHMWK 4Jasmine NguyenÎncă nu există evaluări
- Gary Chamberlain Econometric SDocument152 paginiGary Chamberlain Econometric SGabriel RoblesÎncă nu există evaluări
- Exercises For TFFY54Document25 paginiExercises For TFFY54sattar28Încă nu există evaluări
- Order Statistics PDFDocument3 paginiOrder Statistics PDFDwi LestarinsihÎncă nu există evaluări
- Midterm 1 ReviewDocument4 paginiMidterm 1 ReviewJovan WhiteÎncă nu există evaluări
- Tutorial On Principal Component Analysis: Javier R. MovellanDocument9 paginiTutorial On Principal Component Analysis: Javier R. Movellansitaram_1Încă nu există evaluări
- Chap2 PDFDocument20 paginiChap2 PDFJacobÎncă nu există evaluări
- Conditional Expectations And Renormalization: d dt φ (t) = R (φ (t) ) , φ (0) = x,, R, x, i = 1, - . -, n, and t isDocument14 paginiConditional Expectations And Renormalization: d dt φ (t) = R (φ (t) ) , φ (0) = x,, R, x, i = 1, - . -, n, and t isLouis LingÎncă nu există evaluări
- Estimation Theory PresentationDocument66 paginiEstimation Theory PresentationBengi Mutlu Dülek100% (1)
- ECONOMETRICS BASICSDocument61 paginiECONOMETRICS BASICSmaxÎncă nu există evaluări
- Linear Algebra and Applications: Benjamin RechtDocument42 paginiLinear Algebra and Applications: Benjamin RechtKarzan Kaka SwrÎncă nu există evaluări
- MultivariableRegression 6Document44 paginiMultivariableRegression 6Alada manaÎncă nu există evaluări
- Solution to exercises on MVN distributionsDocument3 paginiSolution to exercises on MVN distributionsAhmed DihanÎncă nu există evaluări
- Probability Formula SheetDocument11 paginiProbability Formula SheetJake RoosenbloomÎncă nu există evaluări
- Stat331-Multiple Linear RegressionDocument13 paginiStat331-Multiple Linear RegressionSamantha YuÎncă nu există evaluări
- Ee132b Hw1 SolDocument4 paginiEe132b Hw1 SolAhmed HassanÎncă nu există evaluări
- ExercisesDocument27 paginiExercisesPatryk MartyniakÎncă nu există evaluări
- Classical Multiple RegressionDocument5 paginiClassical Multiple Regression13sandipÎncă nu există evaluări
- Appendix Robust RegressionDocument17 paginiAppendix Robust RegressionPRASHANTH BHASKARANÎncă nu există evaluări
- Review Math FoundationDocument8 paginiReview Math FoundationPrince Arc MiguelÎncă nu există evaluări
- Lecture 2 ProbabilityDocument28 paginiLecture 2 ProbabilityJ ChoyÎncă nu există evaluări
- Regression and CorrelationDocument4 paginiRegression and CorrelationClark ConstantinoÎncă nu există evaluări
- Definition 4.1.1.: R Then We Could Define ADocument42 paginiDefinition 4.1.1.: R Then We Could Define AAkshayÎncă nu există evaluări
- Lecture 14: Principal Component Analysis: Computing The Principal ComponentsDocument6 paginiLecture 14: Principal Component Analysis: Computing The Principal ComponentsShebinÎncă nu există evaluări
- Exponential function properties and differential equationsDocument5 paginiExponential function properties and differential equationsAlonso Pablo Olivares LagosÎncă nu există evaluări
- Regression Model AssumptionsDocument50 paginiRegression Model AssumptionsEthiop LyricsÎncă nu există evaluări
- NLAFull Notes 22Document59 paginiNLAFull Notes 22forspamreceivalÎncă nu există evaluări
- Applied Econometrics RegressionDocument38 paginiApplied Econometrics RegressionchatfieldlohrÎncă nu există evaluări
- Functional Equations For Fractal Interpolants Lj. M. Koci C and A. C. SimoncelliDocument12 paginiFunctional Equations For Fractal Interpolants Lj. M. Koci C and A. C. SimoncelliSilvia PalascaÎncă nu există evaluări
- Ebook Course in Probability 1St Edition Weiss Solutions Manual Full Chapter PDFDocument63 paginiEbook Course in Probability 1St Edition Weiss Solutions Manual Full Chapter PDFAnthonyWilsonecna100% (5)
- Lecture 09Document15 paginiLecture 09nandish mehtaÎncă nu există evaluări
- Chap 5 PMEDocument48 paginiChap 5 PMEFarhan Khan NiaZiÎncă nu există evaluări
- More Discrete R.VDocument40 paginiMore Discrete R.VjiddagerÎncă nu există evaluări
- ProblemsDocument62 paginiProblemserad_5Încă nu există evaluări
- Lecture 7: Regression: 1.1 Linear ModelDocument20 paginiLecture 7: Regression: 1.1 Linear ModelKirandeep KaurÎncă nu există evaluări
- Assign20153 SolDocument47 paginiAssign20153 SolMarco Perez HernandezÎncă nu există evaluări
- Chapter3-Discrete DistributionDocument141 paginiChapter3-Discrete DistributionjayÎncă nu există evaluări
- Random Variable Modified PDFDocument19 paginiRandom Variable Modified PDFIMdad HaqueÎncă nu există evaluări
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)De la EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Încă nu există evaluări
- LOW-72 Johnson CounterDocument8 paginiLOW-72 Johnson Counterpsangwan8028848Încă nu există evaluări
- Telephone DirectoryDocument46 paginiTelephone DirectoryMadhu Babu SikhaÎncă nu există evaluări
- Queueing System FormulasDocument4 paginiQueueing System FormulasMadhu Babu SikhaÎncă nu există evaluări
- A List of JournalsDocument2 paginiA List of JournalsferitarzanÎncă nu există evaluări
- Basics of Research Paper Writing and PublishingDocument18 paginiBasics of Research Paper Writing and PublishingAli Hussain Kazim100% (1)
- A Single-Server QueueDocument30 paginiA Single-Server QueueMadhu Babu SikhaÎncă nu există evaluări
- Poisson Process GenerationDocument6 paginiPoisson Process GenerationMadhu Babu SikhaÎncă nu există evaluări
- Quiz 6Document3 paginiQuiz 6Shrey MangalÎncă nu există evaluări
- ProbDistributionsRandomVariablesDocument110 paginiProbDistributionsRandomVariablesjohnarulrajÎncă nu există evaluări
- DAT101x Lab - Exploring Data PDFDocument3 paginiDAT101x Lab - Exploring Data PDFFrançois AmaniÎncă nu există evaluări
- Quality Assurance and Quality Control in The Analytical Chemical LaboratoryDocument5 paginiQuality Assurance and Quality Control in The Analytical Chemical Laboratoryproyec_eÎncă nu există evaluări
- Machine Learning A Z Q ADocument52 paginiMachine Learning A Z Q ADina Garan100% (1)
- Harrison 2018Document32 paginiHarrison 2018Daniele SoardiÎncă nu există evaluări
- Route Choice Modelling in Urban Transportation NetDocument9 paginiRoute Choice Modelling in Urban Transportation NetSayan GhosalÎncă nu există evaluări
- Probability, Random Variables and Random Signals - 1 - MCQsDocument4 paginiProbability, Random Variables and Random Signals - 1 - MCQsPrajwal BirwadkarÎncă nu există evaluări
- MODULE 5 and 6 STATISTICS AND PROBABILITY - Docx (1) - PDFDocument9 paginiMODULE 5 and 6 STATISTICS AND PROBABILITY - Docx (1) - PDFGraecel Ramirez100% (2)
- Probability Distribution ChapterDocument11 paginiProbability Distribution ChapterShimelis Tesema100% (1)
- Psych Stat Problem and AnswersDocument3 paginiPsych Stat Problem and AnswersSummer LoveÎncă nu există evaluări
- Class Material - Multiple Linear RegressionDocument57 paginiClass Material - Multiple Linear RegressionVishvajit KumbharÎncă nu există evaluări
- Probility AssignmentDocument20 paginiProbility AssignmentMuhammad HananÎncă nu există evaluări
- Maximizing Returns and Minimizing Risk with Portfolio TheoryDocument47 paginiMaximizing Returns and Minimizing Risk with Portfolio TheoryShubham VarshneyÎncă nu există evaluări
- Chapter 2Document41 paginiChapter 2Basel TahaÎncă nu există evaluări
- One Dimensional Random Variables ExplainedDocument45 paginiOne Dimensional Random Variables ExplainedFitsumÎncă nu există evaluări
- OneWayANOVA LectureNotesDocument13 paginiOneWayANOVA LectureNotesTizon CoffinÎncă nu există evaluări
- Vs30 From Shallow ModelsDocument7 paginiVs30 From Shallow ModelsNarayan RoyÎncă nu există evaluări
- Exercise Prior MidtermDocument10 paginiExercise Prior MidtermNaila YumnaÎncă nu există evaluări
- University of The East: College of Engineering Computer Engineering Department CaloocanDocument10 paginiUniversity of The East: College of Engineering Computer Engineering Department CaloocanTawki BakiÎncă nu există evaluări
- Solomonoff's Induction Introduction and Some Philosophical UseDocument45 paginiSolomonoff's Induction Introduction and Some Philosophical UseAnimesh SinghÎncă nu există evaluări
- CIV2037F Additional QuestionsDocument3 paginiCIV2037F Additional QuestionsquikgoldÎncă nu există evaluări
- QP Qam06Document4 paginiQP Qam06Ravi NookalaÎncă nu există evaluări
- INLA RinlaDocument87 paginiINLA RinlaRachmawati RofahÎncă nu există evaluări
- MOMOENTDocument10 paginiMOMOENTkeithlain4123Încă nu există evaluări
- PSQT-QB-Unit 1Document3 paginiPSQT-QB-Unit 1fabiomughilanÎncă nu există evaluări
- MODULE in Stat Week 6Document10 paginiMODULE in Stat Week 6Joshua GonzalesÎncă nu există evaluări
- Stat 331 Tutorial SetDocument2 paginiStat 331 Tutorial SetMarcus KusiÎncă nu există evaluări
- EECE 5639 Computer Vision I: Filtering, Probability ReviewDocument54 paginiEECE 5639 Computer Vision I: Filtering, Probability ReviewSourabh Sisodia SrßÎncă nu există evaluări
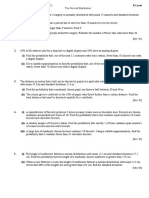
- 5 The Normal DistributionDocument9 pagini5 The Normal DistributionIndah PrasetyawatiÎncă nu există evaluări