S-ar putea să vă placă și
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Tabla de Multiplicar Template para RellenarDocument9 paginiTabla de Multiplicar Template para RellenarsantipÎncă nu există evaluări
- Grasshopper Primer Second Edition 090323Document163 paginiGrasshopper Primer Second Edition 090323landleyvvv100% (5)
- Schnorr - Handbook For Disc SpringsDocument151 paginiSchnorr - Handbook For Disc SpringsPieter van der MeerÎncă nu există evaluări
- PE Format Reverse Engineer ViewDocument87 paginiPE Format Reverse Engineer Viewsantip100% (2)
- Curso de CaricaturaDocument104 paginiCurso de CaricaturaOscar Roberto Recinos Cañas100% (4)
- Experimental in Ve 00 IverDocument94 paginiExperimental in Ve 00 IversantipÎncă nu există evaluări
- Eng AnemiaDocument51 paginiEng AnemiaMunira Bukhari100% (1)
- Volvo 850 Instrument Panel WiringDocument22 paginiVolvo 850 Instrument Panel Wiringfbr4Încă nu există evaluări
- Conformalimagewa00fred BWDocument26 paginiConformalimagewa00fred BWsantipÎncă nu există evaluări
- TEXT BOOK of GEOMETRYDocument462 paginiTEXT BOOK of GEOMETRYsantip100% (3)
- UBS Price and Earnings ReportDocument43 paginiUBS Price and Earnings ReportArun PrabhudesaiÎncă nu există evaluări
- 1995 Volvo 850 Wiring DiagramsDocument58 pagini1995 Volvo 850 Wiring DiagramssantipÎncă nu există evaluări
- TEXT BOOK of GEOMETRYDocument462 paginiTEXT BOOK of GEOMETRYsantip100% (3)
- Bolted Joint Studies in GRPDocument256 paginiBolted Joint Studies in GRPsantipÎncă nu există evaluări
- Simon Alarm System v3 Users ManualDocument36 paginiSimon Alarm System v3 Users ManualsantipÎncă nu există evaluări
- 1995 Volvo Automatic Transmission Dia.Document38 pagini1995 Volvo Automatic Transmission Dia.jimrazoÎncă nu există evaluări
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- BME-Module 2Document23 paginiBME-Module 2Ajith KumarÎncă nu există evaluări
- CH093Document6 paginiCH093Nirina ArimananaÎncă nu există evaluări
- Fluid Power Systems Question BankDocument8 paginiFluid Power Systems Question BankVVCET - MechÎncă nu există evaluări
- Fluent and Multi Phase FlowsDocument18 paginiFluent and Multi Phase FlowsMuhammad Shafiq Bin RoslanÎncă nu există evaluări
- GATE 2017 Mechanical EngineeringDocument681 paginiGATE 2017 Mechanical EngineeringthirumalaikumaranÎncă nu există evaluări
- Horizontal Vessel Sizing ProgramDocument8 paginiHorizontal Vessel Sizing ProgramsegunoyesÎncă nu există evaluări
- Science Quarter 1 - Module 6: Heat and Temperature: What's More What Can I Do?Document1 paginăScience Quarter 1 - Module 6: Heat and Temperature: What's More What Can I Do?Aldriniel Jr VeralloÎncă nu există evaluări
- Peka ChemistryDocument2 paginiPeka ChemistryAida Syafiqah75% (12)
- Sootblowing Sequence & TroubleshootingDocument4 paginiSootblowing Sequence & TroubleshootingJunaid BaigÎncă nu există evaluări
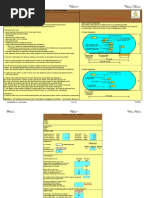
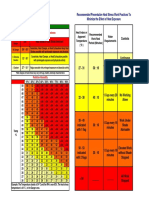
- Process Engineering Calculations in Cement IndustryDocument33 paginiProcess Engineering Calculations in Cement IndustryYhane100% (2)
- SIMONE Software Equations and MethodsDocument58 paginiSIMONE Software Equations and MethodsReza GhanavatiÎncă nu există evaluări
- Seismic WavesDocument10 paginiSeismic WavesYangki DizonÎncă nu există evaluări
- S12 Water Flushing CircuitDocument60 paginiS12 Water Flushing CircuitjoelcarhuanchoÎncă nu există evaluări
- S07050010120134013Module 3 - Compressibility of SoilDocument85 paginiS07050010120134013Module 3 - Compressibility of SoilKristianto AdeÎncă nu există evaluări
- 3 Problems Stress Strain Relations 3Document12 pagini3 Problems Stress Strain Relations 3Oguzhan TurgutÎncă nu există evaluări
- Interactive Schematic: This Document Is Best Viewed at A Screen Resolution of 1024 X 768Document15 paginiInteractive Schematic: This Document Is Best Viewed at A Screen Resolution of 1024 X 768jesuz_mtz26Încă nu există evaluări
- Calculations 2Document3 paginiCalculations 2LeoÎncă nu există evaluări
- Prestressed Concrete DesignDocument864 paginiPrestressed Concrete DesignPhearüm PotÎncă nu există evaluări
- HEAT STRESS GUIDEDocument1 paginăHEAT STRESS GUIDEJun WangÎncă nu există evaluări
- CH 10 Lab WriteupDocument3 paginiCH 10 Lab Writeupmickmuffinx100% (1)
- ARBE4102 Lecture 7 Introduction to Building Services and HVACDocument80 paginiARBE4102 Lecture 7 Introduction to Building Services and HVACMeolah ChenÎncă nu există evaluări
- Fatigue Assessment and Lefm Analysis of Cruciform Joints Fabricated With Different Welding ProcessesDocument13 paginiFatigue Assessment and Lefm Analysis of Cruciform Joints Fabricated With Different Welding Processeslionking1Încă nu există evaluări
- The Case Study Is About The Failure of A Phantom Flap Actuator Rod. Basically, AnDocument9 paginiThe Case Study Is About The Failure of A Phantom Flap Actuator Rod. Basically, AnnabilÎncă nu există evaluări
- 2611 Fall 2006Document300 pagini2611 Fall 2006combatps1Încă nu există evaluări
- Technical Monograph 41 - Understanding Valve NoiseDocument8 paginiTechnical Monograph 41 - Understanding Valve NoiseEric WengÎncă nu există evaluări
- Directions: Solve The Following Problems With The Most Accurate Answers. Problem #1. (WSD Method - Cracking Moment)Document1 paginăDirections: Solve The Following Problems With The Most Accurate Answers. Problem #1. (WSD Method - Cracking Moment)Jat BacsafraÎncă nu există evaluări
- Chapter 9 Oblique Shock And Expansion Waves 斜激波和膨胀波 9.1 引言Document156 paginiChapter 9 Oblique Shock And Expansion Waves 斜激波和膨胀波 9.1 引言evelyn jayaÎncă nu există evaluări
- Shear Behavior of Unbonded Post-TensionedDocument10 paginiShear Behavior of Unbonded Post-TensionedAnonymous eB2AZT3Încă nu există evaluări
- Lindab Podium Grinzi RaciteDocument21 paginiLindab Podium Grinzi RaciteCosmin PanaitÎncă nu există evaluări
- Finite Element Methods For Unsaturated Porous Solids and Their Acallari2009 PDFDocument17 paginiFinite Element Methods For Unsaturated Porous Solids and Their Acallari2009 PDFAndrésHermannR.LeónÎncă nu există evaluări