S-ar putea să vă placă și
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Centroid Allin1dc Install ManualDocument119 paginiCentroid Allin1dc Install ManualCarlos RodriguezÎncă nu există evaluări
- EMGT102 - Online Activity No. 5inventory Control ModelDocument4 paginiEMGT102 - Online Activity No. 5inventory Control Modelmache dumadÎncă nu există evaluări
- Catalogo AlmaniDocument28 paginiCatalogo AlmaniCristian BravoÎncă nu există evaluări
- HVDC Jan SvenssonDocument13 paginiHVDC Jan SvenssonWilber William Moscoso ZamudioÎncă nu există evaluări
- Conversion of A Conventional Bench Lathe To CNCDocument5 paginiConversion of A Conventional Bench Lathe To CNCEverAngelÎncă nu există evaluări
- ATR72Document3 paginiATR72NebÎncă nu există evaluări
- Phontech BTS4000 Documentation HandbookDocument56 paginiPhontech BTS4000 Documentation HandbookAlan TanÎncă nu există evaluări
- 65646-Item-Brochure Dynapac DRS120DDocument5 pagini65646-Item-Brochure Dynapac DRS120DUri RocabadoÎncă nu există evaluări
- Method Statement-Water FeaturesDocument5 paginiMethod Statement-Water Featuresbhupsjangir100% (2)
- Chapter 8 (3-Phase AC Circuits)Document47 paginiChapter 8 (3-Phase AC Circuits)Conde RomelÎncă nu există evaluări
- 16H Motor Grader ATS00001-UP (MACHINE) POWERED BY 3196 Engine (SEBP3329 - 89) - Círculo - InstalarDocument12 pagini16H Motor Grader ATS00001-UP (MACHINE) POWERED BY 3196 Engine (SEBP3329 - 89) - Círculo - InstalarDouglas GomesÎncă nu există evaluări
- Alarm System PDFDocument15 paginiAlarm System PDFsimbamikeÎncă nu există evaluări
- Manual Del Operador Jt2720Document183 paginiManual Del Operador Jt2720yonatahanÎncă nu există evaluări
- RF Coax Connectors MolexDocument1 paginăRF Coax Connectors MolexedgarlibanioÎncă nu există evaluări
- 323113-PF Chain Link FencingDocument3 pagini323113-PF Chain Link Fencingabdullah sahibÎncă nu există evaluări
- FOOD PREPARATION AREA (KITCHEN) Although The Food Preparation Area, or Kitchen, Is Listed in The SupportDocument1 paginăFOOD PREPARATION AREA (KITCHEN) Although The Food Preparation Area, or Kitchen, Is Listed in The SupportĐức ToànÎncă nu există evaluări
- Modulus II PlusDocument10 paginiModulus II PlusMiguelÎncă nu există evaluări
- ADS Manual 5310Document9 paginiADS Manual 5310extremesfire1571Încă nu există evaluări
- MSP430C11x1, MSP430F11x1A Mixed Signal Microcontroller: DescriptionDocument44 paginiMSP430C11x1, MSP430F11x1A Mixed Signal Microcontroller: DescriptionRueben Jeff SolisÎncă nu există evaluări
- .Technical Detail of UNINYVIN CABLEDocument1 pagină.Technical Detail of UNINYVIN CABLEJayÎncă nu există evaluări
- Gea30738b MV6 - en - 160517 - V8Document16 paginiGea30738b MV6 - en - 160517 - V8sykimk8921Încă nu există evaluări
- Gas Range: Defsgg 24 SsDocument20 paginiGas Range: Defsgg 24 Ssfaker fake fakersonÎncă nu există evaluări
- Fire Alarm SystemDocument29 paginiFire Alarm Systempurit83Încă nu există evaluări
- HW L 110 E: Water Cooled Packaged UnitDocument7 paginiHW L 110 E: Water Cooled Packaged UnitMilagros AriasÎncă nu există evaluări
- Power Electronics Chapter 1 Introduction: Dr. Othman Hassan Assistant Professor SIUDocument38 paginiPower Electronics Chapter 1 Introduction: Dr. Othman Hassan Assistant Professor SIUAwe HughÎncă nu există evaluări
- Submittal Wilo 01Document28 paginiSubmittal Wilo 01Shaik Bepari JakeerÎncă nu există evaluări
- Branch Leaflet TECS-WDocument12 paginiBranch Leaflet TECS-WAlfin khoeril UmamÎncă nu există evaluări
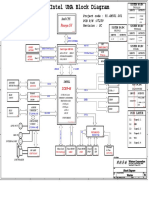
- Esquema-HP COMPAQ PRESARIO CQ60 CQ70 WISTRON WARRIORDocument42 paginiEsquema-HP COMPAQ PRESARIO CQ60 CQ70 WISTRON WARRIORErmirio MarquesÎncă nu există evaluări
- VCB PDFDocument6 paginiVCB PDFSHAJAHANÎncă nu există evaluări
- Engine - ID4 2.2L Diesel - : Item SpecificationDocument104 paginiEngine - ID4 2.2L Diesel - : Item SpecificationRichard Andrianjaka LuckyÎncă nu există evaluări