S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- SLA707xM Series: 2-Phase Unipolar Stepper Motor DriverDocument20 paginiSLA707xM Series: 2-Phase Unipolar Stepper Motor DriverKatherine EsperillaÎncă nu există evaluări
- Bearing SettlementDocument4 paginiBearing SettlementBahaismail100% (1)
- DSP QBDocument8 paginiDSP QBNithya VijayaÎncă nu există evaluări
- Color Coding - 2018Document28 paginiColor Coding - 2018Aris MunandarÎncă nu există evaluări
- Avast 2050 License Faker by ZeNiX 2014-03-14 enDocument1 paginăAvast 2050 License Faker by ZeNiX 2014-03-14 enenteryourname5Încă nu există evaluări
- I Am Trying To Design A Bus Brace For A 3 Phase Busbar SyatemDocument9 paginiI Am Trying To Design A Bus Brace For A 3 Phase Busbar SyatemSanjeewa HemaratneÎncă nu există evaluări
- MS Word Lecture NotesDocument11 paginiMS Word Lecture NotesMoguriÎncă nu există evaluări
- Financial Glossary Reuters PDFDocument241 paginiFinancial Glossary Reuters PDFPablo Bouvier100% (1)
- Account Statement From 27 Dec 2017 To 27 Jun 2018Document4 paginiAccount Statement From 27 Dec 2017 To 27 Jun 2018mrcopy xeroxÎncă nu există evaluări
- Helicopter MaintenanceDocument347 paginiHelicopter MaintenanceJai Deep88% (24)
- 147380-1 Motoman XRC Controller Fieldbus (XFB01) Instruction ManualDocument102 pagini147380-1 Motoman XRC Controller Fieldbus (XFB01) Instruction Manualrubi monÎncă nu există evaluări
- Đo Nhiệt Độ LI-24ALW-SelectDocument4 paginiĐo Nhiệt Độ LI-24ALW-SelectThang NguyenÎncă nu există evaluări
- Module 2 - Part 2Document85 paginiModule 2 - Part 2Tanvi DeoreÎncă nu există evaluări
- Noor Hafifi Bin Jalal: Operating Code 1: Demand ForecastDocument47 paginiNoor Hafifi Bin Jalal: Operating Code 1: Demand ForecastGopalakrishnan SekharanÎncă nu există evaluări
- Complaint Handling Policy of CBECDocument52 paginiComplaint Handling Policy of CBECharrypotter1Încă nu există evaluări
- Towards Improvement of The Rights and Duties of Mutawalli and Nazir in The Management And..Document17 paginiTowards Improvement of The Rights and Duties of Mutawalli and Nazir in The Management And..Mutqinah SshiÎncă nu există evaluări
- 1st Activity in EthicsDocument2 pagini1st Activity in EthicsAleiah Jane Valencia AlverioÎncă nu există evaluări
- Cover LetterDocument2 paginiCover LetterSasi Gangadhar BÎncă nu există evaluări
- Mangla Refurbishment Project Salient FeaturesDocument8 paginiMangla Refurbishment Project Salient FeaturesJAZPAKÎncă nu există evaluări
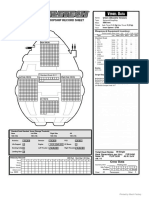
- Union Class Dropship 3025Document1 paginăUnion Class Dropship 3025A KÎncă nu există evaluări
- Philippine Metal Foundries v. CADocument2 paginiPhilippine Metal Foundries v. CAMarcus AureliusÎncă nu există evaluări
- Lolcat - Linux Cat Command Make Rainbows & Unicorns - LinuxsecretsDocument1 paginăLolcat - Linux Cat Command Make Rainbows & Unicorns - LinuxsecretsAli BadÎncă nu există evaluări
- N G Ày 2 0 T H Á NG B A N Ă M 2 0 2 0: Brand ManagementDocument10 paginiN G Ày 2 0 T H Á NG B A N Ă M 2 0 2 0: Brand ManagementThịnh NguyễnÎncă nu există evaluări
- Improving The Passenger Experience: Monitoring Airport Quality of ServiceDocument6 paginiImproving The Passenger Experience: Monitoring Airport Quality of ServiceParisa HadidianÎncă nu există evaluări
- Calculation of Work IndexDocument5 paginiCalculation of Work IndexEnryan Oreski RiyadiÎncă nu există evaluări
- Oxidation Ponds & LagoonsDocument31 paginiOxidation Ponds & LagoonsDevendra Sharma100% (1)
- FPO Policy-1Document96 paginiFPO Policy-1shashanksaranÎncă nu există evaluări
- Techniques Tips For Polishing PDFDocument6 paginiTechniques Tips For Polishing PDFrobin parmarÎncă nu există evaluări
- Micro Link Information Technology Business College: Department of Software EngineeringDocument34 paginiMicro Link Information Technology Business College: Department of Software Engineeringbeki4Încă nu există evaluări
- MODULE-1-EU111 Univeristy and IDocument8 paginiMODULE-1-EU111 Univeristy and IAbzchen YacobÎncă nu există evaluări