S-ar putea să vă placă și
- How to Rebuild & Modify Rochester Quadrajet CarburetorsDe la EverandHow to Rebuild & Modify Rochester Quadrajet CarburetorsEvaluare: 5 din 5 stele5/5 (2)
- S 420i SerieDocument4 paginiS 420i SerieIbarra Aaron100% (2)
- LR Mate 100ibDocument2 paginiLR Mate 100iblnahoyosÎncă nu există evaluări
- Fanuc M-900ia SeriesDocument4 paginiFanuc M-900ia SeriesAxel GomezÎncă nu există evaluări
- M410 RJ3Document4 paginiM410 RJ3Ali Hernandez100% (1)
- C.Periodic Maintenance TableDocument2 paginiC.Periodic Maintenance Tableleonel mendieta100% (1)
- ARC Mate 120ic Series - 8Document2 paginiARC Mate 120ic Series - 8Joimir PerezÎncă nu există evaluări
- FANUC LR Mate 200ic DatasheetDocument1 paginăFANUC LR Mate 200ic DatasheetGodwin J. SobinÎncă nu există evaluări
- R 2000ic PDFDocument6 paginiR 2000ic PDFPRASADÎncă nu există evaluări
- Robot Manual HwashiDocument183 paginiRobot Manual HwashiDiogo CoelhoÎncă nu există evaluări
- Report On Basic Setups of Fanuc Robot: Difacto Robotics and AutomationDocument5 paginiReport On Basic Setups of Fanuc Robot: Difacto Robotics and AutomationAnil PandeyÎncă nu există evaluări
- Colchester LathesDocument7 paginiColchester LathesAndrew ParrottÎncă nu există evaluări
- AXstandardRev7+SafetyRev4 CombinedDocument125 paginiAXstandardRev7+SafetyRev4 CombinedJose Ernesto AcevedoÎncă nu există evaluări
- ABB Torch CleanerDocument44 paginiABB Torch CleanerAsim PedicÎncă nu există evaluări
- MR J3 TC E.pdf Meldas Servo MotorDocument227 paginiMR J3 TC E.pdf Meldas Servo Motorchidambaram kasiÎncă nu există evaluări
- Powerflex® 40P: Technical DataDocument36 paginiPowerflex® 40P: Technical DataPauli TaÎncă nu există evaluări
- M-900iA Serie 2 PDFDocument4 paginiM-900iA Serie 2 PDFFrancisco PedrozaÎncă nu există evaluări
- Mitsubishi Robot Catalog.L (NA) 09051ENG ADocument16 paginiMitsubishi Robot Catalog.L (NA) 09051ENG Ack_peyÎncă nu există evaluări
- M SeriesDocument47 paginiM SeriesMeet PAtelÎncă nu există evaluări
- RoboCare Manual enDocument17 paginiRoboCare Manual enVoxine OuscularenÎncă nu există evaluări
- As 117800 Iv-H2000ma Iv-H500ca Iv-H500ma Um 519GB WW GB 2031 8Document436 paginiAs 117800 Iv-H2000ma Iv-H500ca Iv-H500ma Um 519GB WW GB 2031 8Luis aÎncă nu există evaluări
- AR4 Robot Manul V1.5 PDFDocument292 paginiAR4 Robot Manul V1.5 PDFEusebio RivasÎncă nu există evaluări
- MELFA Works - Instruction Manual BFP-A8525-D (11.08)Document95 paginiMELFA Works - Instruction Manual BFP-A8525-D (11.08)Patran Valentin100% (1)
- NCU SinumerikDocument98 paginiNCU SinumerikSergeyÎncă nu există evaluări
- Urun KataloguDocument17 paginiUrun KataloguHaroun Al RachidÎncă nu există evaluări
- Quick Learn ManualDocument20 paginiQuick Learn ManualwalterazrÎncă nu există evaluări
- R 2000ic Operators PDFDocument222 paginiR 2000ic Operators PDFAdam ZiobrowskiÎncă nu există evaluări
- FANUC LR Mate 200ic DatasheetDocument1 paginăFANUC LR Mate 200ic DatasheetGodwin J. SobinÎncă nu există evaluări
- HW0483057.0 Trouble SchootingDocument142 paginiHW0483057.0 Trouble Schootingluho1979Încă nu există evaluări
- Robotmount: Specified Internationally For The New Arc Welding Robot ARC Mate 100icDocument8 paginiRobotmount: Specified Internationally For The New Arc Welding Robot ARC Mate 100icAsrul Arashi IrdianaÎncă nu există evaluări
- Robot Setup - ABBDocument24 paginiRobot Setup - ABBTrần Văn TrườngÎncă nu există evaluări
- Rotary Table Dynamic Fixture Offset Instruction 2Document5 paginiRotary Table Dynamic Fixture Offset Instruction 2diaboloboyÎncă nu există evaluări
- ABB IRB 6400 Calibration ManualDocument12 paginiABB IRB 6400 Calibration ManualAntonio SanchezÎncă nu există evaluări
- KR 10 R1100-2Document1 paginăKR 10 R1100-2Merced HernandezÎncă nu există evaluări
- Test Conditions For Machining Centres - Part 11: Noise TestsDocument13 paginiTest Conditions For Machining Centres - Part 11: Noise TestsbrunoagandraÎncă nu există evaluări
- Hyundai-robotics-Industrial Robot Series Eng 0802Document2 paginiHyundai-robotics-Industrial Robot Series Eng 0802jitender kumar0% (1)
- Leadwell NV-Serie 2015 PDFDocument8 paginiLeadwell NV-Serie 2015 PDFLevi BriceñoÎncă nu există evaluări
- Fanuc P50iBDocument2 paginiFanuc P50iBarmando rivera50% (2)
- Robot Series: Hyundai RoboticsDocument8 paginiRobot Series: Hyundai Roboticsjavier50% (2)
- Welding ShopDocument10 paginiWelding ShopAsifJavedÎncă nu există evaluări
- RV N e PDFDocument60 paginiRV N e PDFdavev2005Încă nu există evaluări
- Fanuc Arc Mate 100ib M-6ib Maintenance Manual B-81545en-01Document2 paginiFanuc Arc Mate 100ib M-6ib Maintenance Manual B-81545en-01TNasteca100% (1)
- LG CM4320Document63 paginiLG CM4320soms65Încă nu există evaluări
- S3 M93 Manual PDFDocument203 paginiS3 M93 Manual PDFgs100% (1)
- Fanuc 30ibDocument34 paginiFanuc 30ibthigale empireÎncă nu există evaluări
- FANUC ARC Mate 100ib - M-6iB - Maintenance Manual - B-81545EN-01Document153 paginiFANUC ARC Mate 100ib - M-6iB - Maintenance Manual - B-81545EN-01Robert MegličÎncă nu există evaluări
- Dokumen - Tips - Fanuc Robotics System R j3 Controller S 430i Series Mechanical Unit Maintenance Manual Marm3s43009801e Rev B PDFDocument4 paginiDokumen - Tips - Fanuc Robotics System R j3 Controller S 430i Series Mechanical Unit Maintenance Manual Marm3s43009801e Rev B PDFMabrouk GuezatiÎncă nu există evaluări
- Fanuc DevicNet Printed From EDOCDocument118 paginiFanuc DevicNet Printed From EDOCIbarra AaronÎncă nu există evaluări
- 2414 2416 Installation ProcedureDocument4 pagini2414 2416 Installation ProcedureJames BondÎncă nu există evaluări
- Robacta Drive TwinDocument12 paginiRobacta Drive TwinAdina Claudia BesliuÎncă nu există evaluări
- V55 Maintenance 4Document5 paginiV55 Maintenance 4วรพงษ์ กอชัชวาลÎncă nu există evaluări
- Socket Screws MetricDocument32 paginiSocket Screws MetricBib GmzÎncă nu există evaluări
- TDS Sadechaf UVACRYL 2151 - v9Document5 paginiTDS Sadechaf UVACRYL 2151 - v9Alex MacabuÎncă nu există evaluări
- capto主轴标准Document87 paginicapto主轴标准中国心Încă nu există evaluări
- Comau High Payload ENG PDFDocument33 paginiComau High Payload ENG PDFDaniel DumitruÎncă nu există evaluări
- ROBODocument2 paginiROBODouglasRodriguesÎncă nu există evaluări
- Datos Técnicos Robot Industrial IRB 6600 03Document2 paginiDatos Técnicos Robot Industrial IRB 6600 03gussyÎncă nu există evaluări
- ArcMate 100ib.Document2 paginiArcMate 100ib.Kamy FoxÎncă nu există evaluări
- Fanuc R-2000iA Series PDFDocument4 paginiFanuc R-2000iA Series PDFAntonio RodriguezÎncă nu există evaluări
- Fanuc ARC Mate 100iDocument2 paginiFanuc ARC Mate 100icorneluts50% (2)
- Manual MERCRUISER QSD 2.0L DIESEL ENGINE Service Repair Manual SN 88200000 and AboveDocument100 paginiManual MERCRUISER QSD 2.0L DIESEL ENGINE Service Repair Manual SN 88200000 and AboveWallace Ferlim100% (6)
- Regolatore Aspirazione Rh38EDocument2 paginiRegolatore Aspirazione Rh38EДжон ДиллинджерÎncă nu există evaluări
- N R P F W G: Direction of Impending MotionDocument28 paginiN R P F W G: Direction of Impending MotionAbdullah Ahsan AhmedÎncă nu există evaluări
- AG 200-800 Series PilotsDocument13 paginiAG 200-800 Series Pilotstxlucky80Încă nu există evaluări
- Tutorial 6Document1 paginăTutorial 6kishan shuklaÎncă nu există evaluări
- Replacement Parts BUSHDocument33 paginiReplacement Parts BUSHIsaac Rodríguez BetancourtÎncă nu există evaluări
- Pneumatic HammerDocument7 paginiPneumatic HammerShlok PatelÎncă nu există evaluări
- Unit 3Document29 paginiUnit 3ashok Pradhan100% (1)
- Piston Rings GuideDocument5 paginiPiston Rings GuideAshok BishtÎncă nu există evaluări
- Optimized Skid Design For Compressor PackagesDocument9 paginiOptimized Skid Design For Compressor Packagesmario_gÎncă nu există evaluări
- Cap 71 PW6000Document158 paginiCap 71 PW6000Luiz FerrazÎncă nu există evaluări
- Anchor BoltsDocument1 paginăAnchor BoltsBert EngÎncă nu există evaluări
- Control & On-Off Valve - Forbes MarshallDocument12 paginiControl & On-Off Valve - Forbes MarshallPraful Patil100% (1)
- 02 PDFDocument39 pagini02 PDFShishir Kumar NayakÎncă nu există evaluări
- BF08H00902 Components EngineDocument125 paginiBF08H00902 Components EngineHéctor Medina100% (1)
- King Air 350 Limitations, Specs, and Study Guide N Compressor N PropellerDocument4 paginiKing Air 350 Limitations, Specs, and Study Guide N Compressor N PropellerMikeÎncă nu există evaluări
- JNTUK-DAP-Course Structure and Syllabus-B.tech (Mechanical Engineering) - II YEAR.R10 StudentsDocument25 paginiJNTUK-DAP-Course Structure and Syllabus-B.tech (Mechanical Engineering) - II YEAR.R10 StudentsAnusha MylavarapuÎncă nu există evaluări
- Hipps: High Integrity Pressure Protection SystemsDocument9 paginiHipps: High Integrity Pressure Protection SystemsAndrew XuguomingÎncă nu există evaluări
- Mfe24pi1505 Design of Production Toolingdrill BushingsDocument14 paginiMfe24pi1505 Design of Production Toolingdrill BushingsSubrat pandaÎncă nu există evaluări
- Goodyear OTR Databook2009Document169 paginiGoodyear OTR Databook2009otr-tireman100% (1)
- Range Rover11 MainDocument19 paginiRange Rover11 Main15101980Încă nu există evaluări
- IVECO StralisDocument40 paginiIVECO StralismicakojicÎncă nu există evaluări
- C Chains APIDocument1 paginăC Chains APILuisSilvaÎncă nu există evaluări
- Gujarat Technological UniversityDocument2 paginiGujarat Technological UniversityMaulik PatelÎncă nu există evaluări
- PN1949 Perkins Irrigation Engine Ratings GuideDocument16 paginiPN1949 Perkins Irrigation Engine Ratings GuideMd ShÎncă nu există evaluări
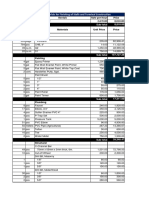
- 3 Hrs Motor Grader 2,670.00 8,010.00: Detailed Bill of Materials For Finishing of Stalls and Terminal ConstructionDocument2 pagini3 Hrs Motor Grader 2,670.00 8,010.00: Detailed Bill of Materials For Finishing of Stalls and Terminal ConstructionKris Aileen CortezÎncă nu există evaluări
- Catalogos BombasDocument12 paginiCatalogos BombasJose NavarreteÎncă nu există evaluări
- Performance Based Seismic Design of Reinforced Concrete Tall BuildingsDocument175 paginiPerformance Based Seismic Design of Reinforced Concrete Tall BuildingsPatrick CanceranÎncă nu există evaluări
- Fatigue Curve For SCM440Document6 paginiFatigue Curve For SCM440Nagaraj RaoÎncă nu există evaluări