S-ar putea să vă placă și
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- Automotive Braking SystemDocument20 paginiAutomotive Braking SystemTapan Sen BiswalÎncă nu există evaluări
- LE-Series Electric Scissor Lifts Spec SheetDocument6 paginiLE-Series Electric Scissor Lifts Spec SheetForklift Systems IncorporatedÎncă nu există evaluări
- Australia - 1989 Saab 900 BrochureDocument60 paginiAustralia - 1989 Saab 900 Brochuremnbvqwert100% (1)
- Hino 700 - Truck PartsDocument6 paginiHino 700 - Truck PartsHugo Valle SierraÎncă nu există evaluări
- 124 SwaybarsDocument2 pagini124 SwaybarsGraham ManningÎncă nu există evaluări
- Astra Hd8 8x4Document4 paginiAstra Hd8 8x4Stanescu Razvan0% (1)
- LMV Eng1Document47 paginiLMV Eng1ntldps50% (2)
- Citroen C5 - InglêsDocument196 paginiCitroen C5 - Inglêsrubens0001Încă nu există evaluări
- Toyota Integrated Safety Management ConceptDocument1 paginăToyota Integrated Safety Management ConceptChok Vee KeongÎncă nu există evaluări
- Air Bag Restraint System - Except Coupe: 1996 Dodge StratusDocument22 paginiAir Bag Restraint System - Except Coupe: 1996 Dodge StratusGeorge TsakatarasÎncă nu există evaluări
- 4t65e Epc Sol FallaDocument3 pagini4t65e Epc Sol FallaTransmisiones Automáticas Chepe100% (1)
- Nissan Almera 1.5L CVTC Price (Peninsular Malaysia)Document1 paginăNissan Almera 1.5L CVTC Price (Peninsular Malaysia)Ali Saifullizan IsmailÎncă nu există evaluări
- Lombardini 3ld510 Piston KitDocument7 paginiLombardini 3ld510 Piston KitCornel CristianÎncă nu există evaluări
- Evermotion Hdmodels Cars Vol.03Document20 paginiEvermotion Hdmodels Cars Vol.03Thu Vien Kien TrucÎncă nu există evaluări
- Ultimaster Body Operator's GuideDocument98 paginiUltimaster Body Operator's GuidePedro Adán Reynoso Calvillo100% (1)
- FSAE Design Report 2ndversionDocument24 paginiFSAE Design Report 2ndversionananÎncă nu există evaluări
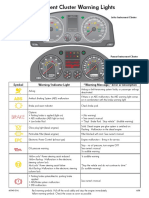
- Instrument Cluster Warning LightsDocument2 paginiInstrument Cluster Warning Lightsしひち し大100% (1)
- Manitou MT 732 EASY (EN)Document2 paginiManitou MT 732 EASY (EN)Manitou100% (2)
- Crash Crash Worthiness Auc03 BMWDocument18 paginiCrash Crash Worthiness Auc03 BMWNareen K ReddyÎncă nu există evaluări
- Spesifikasi Alat BeratDocument19 paginiSpesifikasi Alat BeratKasmiatiZa100% (1)
- A Comparative Study Between Maruti and TataDocument71 paginiA Comparative Study Between Maruti and TataNitin GroverÎncă nu există evaluări
- Mini Roadster BrochureDocument8 paginiMini Roadster BrochureSolo MinisÎncă nu există evaluări
- Nissan Sylphy ANCAPDocument3 paginiNissan Sylphy ANCAPcarbasemyÎncă nu există evaluări
- Daimler Trucks at A Glance Edition 2015 en PDFDocument80 paginiDaimler Trucks at A Glance Edition 2015 en PDFMassimiliano ColettoÎncă nu există evaluări
- NPR 300 CNG Amt A Gas Australiano PDFDocument4 paginiNPR 300 CNG Amt A Gas Australiano PDFdionymackÎncă nu există evaluări
- Cat 2004Document258 paginiCat 2004agus rudiantoÎncă nu există evaluări
- Fraunhofer - Testing of Trailer CouplingDocument0 paginiFraunhofer - Testing of Trailer CouplingBejai Alexander MathewÎncă nu există evaluări
- Hilux Brochure PDFDocument2 paginiHilux Brochure PDFVincent DavinchiÎncă nu există evaluări
- PPM ReportDocument11 paginiPPM ReportayushÎncă nu există evaluări
- NissanDocument31 paginiNissanPetar PavićÎncă nu există evaluări