S-ar putea să vă placă și
- A Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"De la EverandA Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Evaluare: 2.5 din 5 stele2.5/5 (2)
- Controls Problems For Qualifying Exam - Spring 2014: Problem 1Document11 paginiControls Problems For Qualifying Exam - Spring 2014: Problem 1MnshÎncă nu există evaluări
- State Space Representation Part-1Document47 paginiState Space Representation Part-1SingappuliÎncă nu există evaluări
- Elementary Differential Equations with Linear AlgebraDe la EverandElementary Differential Equations with Linear AlgebraÎncă nu există evaluări
- ODE Numerical Analysis RegionsDocument17 paginiODE Numerical Analysis RegionspsylancerÎncă nu există evaluări
- Real Analysis and Probability: Solutions to ProblemsDe la EverandReal Analysis and Probability: Solutions to ProblemsÎncă nu există evaluări
- Lund 0003Document6 paginiLund 0003Ali DurazÎncă nu există evaluări
- Poles Selection TheoryDocument6 paginiPoles Selection TheoryRao ZubairÎncă nu există evaluări
- Kalman DecompositionDocument13 paginiKalman DecompositionOla SkeikÎncă nu există evaluări
- Classnotes For Classical Control Theory: I. E. K Ose Dept. of Mechanical Engineering Bo Gazici UniversityDocument51 paginiClassnotes For Classical Control Theory: I. E. K Ose Dept. of Mechanical Engineering Bo Gazici UniversityGürkan YamanÎncă nu există evaluări
- ELEC4632 Lab 03 2022Document8 paginiELEC4632 Lab 03 2022wwwwwhfzzÎncă nu există evaluări
- Ee 5307 HomeworksDocument15 paginiEe 5307 HomeworksManoj KumarÎncă nu există evaluări
- MODELING LINEAR SYSTEMSDocument39 paginiMODELING LINEAR SYSTEMSFreyley LeyvaÎncă nu există evaluări
- What Form of Control Function Can Drive A Discontinuous-Mode Boost Converter To Chaos Via Period-Doubling?Document6 paginiWhat Form of Control Function Can Drive A Discontinuous-Mode Boost Converter To Chaos Via Period-Doubling?sprabhuieeeÎncă nu există evaluări
- Matlab, Simulink - Control Systems Simulation Using Matlab and SimulinkDocument10 paginiMatlab, Simulink - Control Systems Simulation Using Matlab and SimulinkTarkes DoraÎncă nu există evaluări
- Second Order Systems Control Model - The SallenKey ConfigurationDocument27 paginiSecond Order Systems Control Model - The SallenKey ConfigurationItalo HernandezÎncă nu există evaluări
- Chap 4Document9 paginiChap 4kadivar001Încă nu există evaluări
- Full-State Feedback & Observer DesignDocument29 paginiFull-State Feedback & Observer DesignBi Chen100% (1)
- Thermal (TE-411,412,413,414,511)Document25 paginiThermal (TE-411,412,413,414,511)nved01Încă nu există evaluări
- Divyanshu Prakash: Mewar University, ChittorgarhDocument27 paginiDivyanshu Prakash: Mewar University, ChittorgarhsitakantasamantarayÎncă nu există evaluări
- CHEE319 Quiz1 2015 SoluDocument6 paginiCHEE319 Quiz1 2015 SolusunliasÎncă nu există evaluări
- CH 4Document26 paginiCH 4Keneni AlemayehuÎncă nu există evaluări
- Chapter 1Document8 paginiChapter 1hitesh89Încă nu există evaluări
- Lab3 v2Document10 paginiLab3 v2Pranshumaan SinghÎncă nu există evaluări
- Passivity Based Modelling and Simulation of A Nonlinear Process Control SystemDocument6 paginiPassivity Based Modelling and Simulation of A Nonlinear Process Control SystemJose A MuñozÎncă nu există evaluări
- MAE653 Sp10 Lesson06Document9 paginiMAE653 Sp10 Lesson06Edwin MachacaÎncă nu există evaluări
- Control System Assignment - 2024Document2 paginiControl System Assignment - 2024Sanjana NetamÎncă nu există evaluări
- Linear State FeedbackDocument3 paginiLinear State FeedbackRehman SaleemÎncă nu există evaluări
- Chap 8Document17 paginiChap 8Aryce_Încă nu există evaluări
- On Integral Control in Backstepping: Analysis of Different TechniquesDocument6 paginiOn Integral Control in Backstepping: Analysis of Different TechniqueslimakmÎncă nu există evaluări
- Process Systems Steady-State Modeling and DesignDocument12 paginiProcess Systems Steady-State Modeling and DesignbeichÎncă nu există evaluări
- Problem 11.1: (A) : F (Z) Z X (Z) F (Z) F Z + ZDocument9 paginiProblem 11.1: (A) : F (Z) Z X (Z) F (Z) F Z + Zde8737Încă nu există evaluări
- Systems Control Laboratory: ECE557F LAB2: Controller Design Using Pole Placement and Full Order ObserversDocument6 paginiSystems Control Laboratory: ECE557F LAB2: Controller Design Using Pole Placement and Full Order ObserversColinSimÎncă nu există evaluări
- Control and Estimation of CSTR Process Using Temperature SensorsDocument6 paginiControl and Estimation of CSTR Process Using Temperature SensorsJalenstoneÎncă nu există evaluări
- Linear Control System Lab Task No. 3: Submitted ByDocument5 paginiLinear Control System Lab Task No. 3: Submitted ByUmer EhsanÎncă nu există evaluări
- Optimal Control and Decision Making: EexamDocument18 paginiOptimal Control and Decision Making: EexamAshwin MahoneyÎncă nu există evaluări
- Fourier Series, Discrete Fourier Transforms and Fast Fourier TransformsDocument6 paginiFourier Series, Discrete Fourier Transforms and Fast Fourier Transformsbnm007Încă nu există evaluări
- N-R BasicsDocument46 paginiN-R BasicsHossain 'Soroosh' MohammadiÎncă nu există evaluări
- 07a80202 AdvancedcontrolsystemsDocument7 pagini07a80202 AdvancedcontrolsystemsSharanya ThirichinapalliÎncă nu există evaluări
- Sample Solution To Exam in MAS501 Control Systems 2 Autumn 2015Document8 paginiSample Solution To Exam in MAS501 Control Systems 2 Autumn 2015Priyesh PandeyÎncă nu există evaluări
- Statefb AbiramDocument29 paginiStatefb Abiramumairnaeem_90Încă nu există evaluări
- Edo - BoaDocument17 paginiEdo - BoaEdson Jansen MirandaÎncă nu există evaluări
- Department of Electrical Engineering EE361L: Control Systems LabDocument16 paginiDepartment of Electrical Engineering EE361L: Control Systems Labshryr.scorpioÎncă nu există evaluări
- Solution 8Document22 paginiSolution 8Sigan ChenÎncă nu există evaluări
- Computer Exercises - Google DokumentDocument25 paginiComputer Exercises - Google Dokumentolivia.jakobssoÎncă nu există evaluări
- Control SystemsDocument18 paginiControl SystemsSengottu VelusamyÎncă nu există evaluări
- LOCAL BIFURCATIONSDocument4 paginiLOCAL BIFURCATIONSmenguemengueÎncă nu există evaluări
- ps3 (1) From MAE 4780Document5 paginips3 (1) From MAE 4780fooz10Încă nu există evaluări
- HW 5Document2 paginiHW 5Mahir MahmoodÎncă nu există evaluări
- 241 Final Exam Solution Fa01Document10 pagini241 Final Exam Solution Fa01bd87gl100% (2)
- CS MCQSDocument73 paginiCS MCQSFarhan SafdarÎncă nu există evaluări
- Automatic Control ExerciseDocument140 paginiAutomatic Control Exercisetaile1995Încă nu există evaluări
- Identification: 2.1 Identification of Transfer Functions 2.1.1 Review of Transfer FunctionDocument29 paginiIdentification: 2.1 Identification of Transfer Functions 2.1.1 Review of Transfer FunctionSucheful LyÎncă nu există evaluări
- Some Past Exam Problems in Control Systems - Part 2Document5 paginiSome Past Exam Problems in Control Systems - Part 2vigneshÎncă nu există evaluări
- ChE381 Process Dynamics & Control ExamDocument4 paginiChE381 Process Dynamics & Control ExamSushmitaÎncă nu există evaluări
- Solving Optimal Control Problems With MATLABDocument21 paginiSolving Optimal Control Problems With MATLABxarthrÎncă nu există evaluări
- E209A: Analysis and Control of Nonlinear Systems Problem Set 3 SolutionsDocument13 paginiE209A: Analysis and Control of Nonlinear Systems Problem Set 3 SolutionstetrixÎncă nu există evaluări
- Control Systems 2Document18 paginiControl Systems 2Sengottu VelusamyÎncă nu există evaluări
- A Sufficient Condition For Entrainment of A Van-der-Pol Oscillator Resistively Coupled To A Fixed Voltage InputDocument8 paginiA Sufficient Condition For Entrainment of A Van-der-Pol Oscillator Resistively Coupled To A Fixed Voltage InputmalaysiatotoÎncă nu există evaluări
- Diffusion of InnovationDocument40 paginiDiffusion of Innovationlali62Încă nu există evaluări
- Sound level meter covers noise applicationsDocument2 paginiSound level meter covers noise applicationsAbigail DextreÎncă nu există evaluări
- Ln26r71bd Ln-s2652d Ln26r71b Ln32r71bd LN s3252d DiagramaDocument261 paginiLn26r71bd Ln-s2652d Ln26r71b Ln32r71bd LN s3252d DiagramaVictor Julio AlvarezÎncă nu există evaluări
- Manual ReaperDocument466 paginiManual ReaperJuan Camilo Arroyave ArangoÎncă nu există evaluări
- Samsung DRAM Module Handling Guide - 1128 - 10090119049407 PDFDocument9 paginiSamsung DRAM Module Handling Guide - 1128 - 10090119049407 PDFreza_azadÎncă nu există evaluări
- Corporate Bridge Internship ProposalDocument5 paginiCorporate Bridge Internship ProposalHBhatlaÎncă nu există evaluări
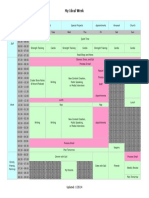
- My Ideal Week PDFDocument1 paginăMy Ideal Week PDFAnonymous QE45TVC9e3Încă nu există evaluări
- Imageclass Lbp611cn 613cdw 2Document2 paginiImageclass Lbp611cn 613cdw 2Maulana Ikhwan SadikinÎncă nu există evaluări
- Reaction Paper The Flight From ConversationDocument4 paginiReaction Paper The Flight From ConversationJoe NasalitaÎncă nu există evaluări
- Tube Upsetting Machines BrochureDocument10 paginiTube Upsetting Machines BrochuredemirilkÎncă nu există evaluări
- Hospital Building Civil ProjectDocument128 paginiHospital Building Civil ProjectArun Ragu100% (6)
- Green Finance For Green GrowthDocument24 paginiGreen Finance For Green GrowthSreejith BhattathiriÎncă nu există evaluări
- Marketing Research of Pre-Start-UpDocument2 paginiMarketing Research of Pre-Start-UpafsalpkgroupÎncă nu există evaluări
- wndw3 Print PDFDocument520 paginiwndw3 Print PDFbryanth9Încă nu există evaluări
- PDF 7758Document2 paginiPDF 7758José Antônio CardosoÎncă nu există evaluări
- Citrix Xen Desktop Interview Questions and Answers - Citrix Xen Desktop FAQsDocument3 paginiCitrix Xen Desktop Interview Questions and Answers - Citrix Xen Desktop FAQsAnonymous rNmxZViYaÎncă nu există evaluări
- SDLC Phases Feasibility Analysis RequirementsDocument4 paginiSDLC Phases Feasibility Analysis RequirementsBrandon Mitchell0% (1)
- EZSkin v3 User GuideDocument16 paginiEZSkin v3 User GuidePg1978Încă nu există evaluări
- Bowing Styles in Irish Fiddle Playing Vol 1 - David LythDocument58 paginiBowing Styles in Irish Fiddle Playing Vol 1 - David LythEmma Harry100% (1)
- DBX DriveRack PA 2 BrochureDocument2 paginiDBX DriveRack PA 2 BrochureSound Technology LtdÎncă nu există evaluări
- Cisco CCIE CCNP RS Study Flashcards Ver 49Document102 paginiCisco CCIE CCNP RS Study Flashcards Ver 49niboozÎncă nu există evaluări
- HTML5 Element Cheatsheet 2019Document1 paginăHTML5 Element Cheatsheet 2019vVvÎncă nu există evaluări
- Aircraft Maintanence Engg Book 9A TypeDocument139 paginiAircraft Maintanence Engg Book 9A TypeimmortalforeverÎncă nu există evaluări
- Camera Raw UpdateDocument3 paginiCamera Raw UpdateHamsharfiÎncă nu există evaluări
- IT Act 2000 overview objectives featuresDocument3 paginiIT Act 2000 overview objectives featuresalpanshiÎncă nu există evaluări
- CCNA - Exploration Network Fundamentals - ENetwork Practice Final ExamDocument26 paginiCCNA - Exploration Network Fundamentals - ENetwork Practice Final Exambrone8Încă nu există evaluări
- HRIS1Document24 paginiHRIS1UMESH VINAYAK ARVINDEKARÎncă nu există evaluări
- Temporary Revision 12 053: Aircraft Maintenance ManualDocument26 paginiTemporary Revision 12 053: Aircraft Maintenance ManualKentÎncă nu există evaluări
- JetFlash Online Recovery User Manual - ENDocument10 paginiJetFlash Online Recovery User Manual - ENSubrata DattaÎncă nu există evaluări
- KANSAS CITY Hyatt Regency Hotel Walkways CollapseDocument8 paginiKANSAS CITY Hyatt Regency Hotel Walkways CollapseRafran RoslyÎncă nu există evaluări
- Defensive Cyber Mastery: Expert Strategies for Unbeatable Personal and Business SecurityDe la EverandDefensive Cyber Mastery: Expert Strategies for Unbeatable Personal and Business SecurityEvaluare: 5 din 5 stele5/5 (1)
- Algorithms to Live By: The Computer Science of Human DecisionsDe la EverandAlgorithms to Live By: The Computer Science of Human DecisionsEvaluare: 4.5 din 5 stele4.5/5 (722)
- 8-Bit Apocalypse: The Untold Story of Atari's Missile CommandDe la Everand8-Bit Apocalypse: The Untold Story of Atari's Missile CommandEvaluare: 3.5 din 5 stele3.5/5 (10)
- Generative AI: The Insights You Need from Harvard Business ReviewDe la EverandGenerative AI: The Insights You Need from Harvard Business ReviewEvaluare: 4.5 din 5 stele4.5/5 (2)
- ChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessDe la EverandChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessÎncă nu există evaluări
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveDe la EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveÎncă nu există evaluări
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldDe la EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldEvaluare: 4.5 din 5 stele4.5/5 (54)
- CompTIA Security+ Get Certified Get Ahead: SY0-701 Study GuideDe la EverandCompTIA Security+ Get Certified Get Ahead: SY0-701 Study GuideEvaluare: 5 din 5 stele5/5 (2)
- Chip War: The Quest to Dominate the World's Most Critical TechnologyDe la EverandChip War: The Quest to Dominate the World's Most Critical TechnologyEvaluare: 4.5 din 5 stele4.5/5 (227)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindDe la EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindÎncă nu există evaluări
- Data-ism: The Revolution Transforming Decision Making, Consumer Behavior, and Almost Everything ElseDe la EverandData-ism: The Revolution Transforming Decision Making, Consumer Behavior, and Almost Everything ElseEvaluare: 3.5 din 5 stele3.5/5 (12)
- The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldDe la EverandThe Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldEvaluare: 4.5 din 5 stele4.5/5 (107)
- So You Want to Start a Podcast: Finding Your Voice, Telling Your Story, and Building a Community that Will ListenDe la EverandSo You Want to Start a Podcast: Finding Your Voice, Telling Your Story, and Building a Community that Will ListenEvaluare: 4.5 din 5 stele4.5/5 (35)
- AI Money Machine: Unlock the Secrets to Making Money Online with AIDe la EverandAI Money Machine: Unlock the Secrets to Making Money Online with AIÎncă nu există evaluări
- Clean Architecture: A Craftsman's Guide to Software Structure and DesignDe la EverandClean Architecture: A Craftsman's Guide to Software Structure and DesignEvaluare: 5 din 5 stele5/5 (8)
- Who's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesDe la EverandWho's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesEvaluare: 4.5 din 5 stele4.5/5 (12)
- CCNA: 3 in 1- Beginner's Guide+ Tips on Taking the Exam+ Simple and Effective Strategies to Learn About CCNA (Cisco Certified Network Associate) Routing And Switching CertificationDe la EverandCCNA: 3 in 1- Beginner's Guide+ Tips on Taking the Exam+ Simple and Effective Strategies to Learn About CCNA (Cisco Certified Network Associate) Routing And Switching CertificationÎncă nu există evaluări
- Artificial Intelligence: The Insights You Need from Harvard Business ReviewDe la EverandArtificial Intelligence: The Insights You Need from Harvard Business ReviewEvaluare: 4.5 din 5 stele4.5/5 (104)
- Mastering Large Language Models: Advanced techniques, applications, cutting-edge methods, and top LLMs (English Edition)De la EverandMastering Large Language Models: Advanced techniques, applications, cutting-edge methods, and top LLMs (English Edition)Încă nu există evaluări
- Fundamentals of Software Architecture: An Engineering ApproachDe la EverandFundamentals of Software Architecture: An Engineering ApproachEvaluare: 4.5 din 5 stele4.5/5 (7)
- 97 Principles for Software Architects: Axioms for software architecture and development written by industry practitionersDe la Everand97 Principles for Software Architects: Axioms for software architecture and development written by industry practitionersEvaluare: 5 din 5 stele5/5 (21)
- Make Money with ChatGPT: Your Guide to Making Passive Income Online with Ease using AI: AI Wealth MasteryDe la EverandMake Money with ChatGPT: Your Guide to Making Passive Income Online with Ease using AI: AI Wealth MasteryÎncă nu există evaluări
- Artificial Intelligence: A Guide for Thinking HumansDe la EverandArtificial Intelligence: A Guide for Thinking HumansEvaluare: 4.5 din 5 stele4.5/5 (30)
- Learn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.De la EverandLearn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.Evaluare: 5 din 5 stele5/5 (34)