S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Untitled-Sound-Objects Installations KDocument42 paginiUntitled-Sound-Objects Installations KtheatreoftheblindÎncă nu există evaluări
- A6 Hiroshi Yokosuka FujikuraJapanDocument31 paginiA6 Hiroshi Yokosuka FujikuraJapantheatreoftheblind100% (2)
- The Ocular Harpsichord of Louis-Bertrand Castel: The Science and Aesthetics of An Eighteenth-Century Cause CélèbreDocument63 paginiThe Ocular Harpsichord of Louis-Bertrand Castel: The Science and Aesthetics of An Eighteenth-Century Cause CélèbretheatreoftheblindÎncă nu există evaluări
- REDDocument7 paginiREDtheatreoftheblind100% (1)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Inventory Counting in Inventory ManagementDocument15 paginiInventory Counting in Inventory ManagementDinesh GuptaÎncă nu există evaluări
- Excel Tips Tricks e-BookV1.1 PDFDocument20 paginiExcel Tips Tricks e-BookV1.1 PDFSulabhÎncă nu există evaluări
- Defense MechanismsDocument4 paginiDefense MechanismsTillu TilluÎncă nu există evaluări
- Precast Concrete Structures For BuildingsDocument10 paginiPrecast Concrete Structures For BuildingsspqdragadosirelandÎncă nu există evaluări
- Lecture Notes 10: Fading Channels ModelsDocument19 paginiLecture Notes 10: Fading Channels ModelsayushÎncă nu există evaluări
- C Urriculum Vitae: Sarvesh Narain SrivastavaDocument4 paginiC Urriculum Vitae: Sarvesh Narain SrivastavanarainsarveshÎncă nu există evaluări
- Arts NPSH TutorialDocument3 paginiArts NPSH TutorialDidier SanonÎncă nu există evaluări
- The Big Table of Quantum AIDocument7 paginiThe Big Table of Quantum AIAbu Mohammad Omar Shehab Uddin AyubÎncă nu există evaluări
- What Is Situational Coaching and When To Use ItDocument3 paginiWhat Is Situational Coaching and When To Use ItBrian KamoedÎncă nu există evaluări
- Segway v1 04 Eng Segway Atv Snarler Manual t3b L7eDocument192 paginiSegway v1 04 Eng Segway Atv Snarler Manual t3b L7eMarouane LASRYÎncă nu există evaluări
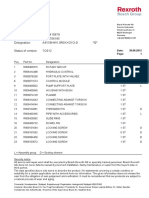
- A4v56hw1 0r0xxo1o-S R909410979 233 19 04 03Document25 paginiA4v56hw1 0r0xxo1o-S R909410979 233 19 04 03Alonso TabordaÎncă nu există evaluări
- Forklift Risk AssessmentDocument5 paginiForklift Risk AssessmentPajserchina100% (4)
- Planmeca Promax 3D Max CBVT Product PresentationDocument36 paginiPlanmeca Promax 3D Max CBVT Product PresentationAD TwentyOne DentalÎncă nu există evaluări
- 2 Mathematics For Social Science-1-1Document58 pagini2 Mathematics For Social Science-1-1ሀበሻ EntertainmentÎncă nu există evaluări
- Frequency Spectrum On XXX OperatorsDocument4 paginiFrequency Spectrum On XXX OperatorsPeng Yuan FengÎncă nu există evaluări
- Group 2 PBA - ScriptDocument6 paginiGroup 2 PBA - ScriptruciÎncă nu există evaluări
- ABC Press Release and AllocationDocument28 paginiABC Press Release and AllocationAndrew Finn KlauberÎncă nu există evaluări
- B1+ Exam MappingDocument3 paginiB1+ Exam Mappingmonika krajewskaÎncă nu există evaluări
- 09-Hispec DespecDocument51 pagini09-Hispec DespecHyungon KimÎncă nu există evaluări
- Daily ReportDocument39 paginiDaily ReportLe TuanÎncă nu există evaluări
- (ANSI - AWS A5.31-92R) AWS A5 Committee On Filler Metal-SpecificationDocument18 pagini(ANSI - AWS A5.31-92R) AWS A5 Committee On Filler Metal-SpecificationSivaram KottaliÎncă nu există evaluări
- Fuel Metering Valve: Operation and Maintenance InstructionsDocument33 paginiFuel Metering Valve: Operation and Maintenance Instructionsalaa fadhelÎncă nu există evaluări
- Respons 910 Analyzer: Operator's ManualDocument246 paginiRespons 910 Analyzer: Operator's ManualUmashankar LoganathanÎncă nu există evaluări
- Ug Vol1Document433 paginiUg Vol1Justin JohnsonÎncă nu există evaluări
- Altium Rigid Flex GuidebookDocument40 paginiAltium Rigid Flex GuidebookKiran Jot Singh100% (1)
- 31 The Emergence of Social GerontologyDocument9 pagini31 The Emergence of Social GerontologygiacomobarnigeoÎncă nu există evaluări
- Service Manual: DDX24BT, DDX340BTDocument94 paginiService Manual: DDX24BT, DDX340BTDumur SaileshÎncă nu există evaluări
- (Type The Documen T Title) : (Year)Document18 pagini(Type The Documen T Title) : (Year)goodluck788Încă nu există evaluări
- Vichinsky Et Al.2019Document11 paginiVichinsky Et Al.2019Kuliah Semester 4Încă nu există evaluări
- 10th Syllbus PDFDocument104 pagini10th Syllbus PDFGagandeep KaurÎncă nu există evaluări