S-ar putea să vă placă și
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Electronic Device and CircuitDocument124 paginiElectronic Device and CircuitRupesh NidhiÎncă nu există evaluări
- Power Electronics and PLC: SCHEME/YEAR:C-16/3 YEAR/5 SEM Subject Code: Ee-504Document76 paginiPower Electronics and PLC: SCHEME/YEAR:C-16/3 YEAR/5 SEM Subject Code: Ee-504rathina4careerÎncă nu există evaluări
- PLC Output Units Relay, Transistor & Triac - PLC ManualDocument3 paginiPLC Output Units Relay, Transistor & Triac - PLC ManualArif Miftahur RohmanÎncă nu există evaluări
- Experiment 4Document5 paginiExperiment 4verboseÎncă nu există evaluări
- Motor Speed Monitoring Control System & GSM ModemDocument21 paginiMotor Speed Monitoring Control System & GSM ModemAditya TomarÎncă nu există evaluări
- Power Electronics Lab ManualDocument112 paginiPower Electronics Lab ManualdiegosendoyaÎncă nu există evaluări
- T2117 Zero-Voltage Switch With Adjustable Ramp PDFDocument16 paginiT2117 Zero-Voltage Switch With Adjustable Ramp PDFnenadÎncă nu există evaluări
- Ds x61 en SSR Technical InformationDocument17 paginiDs x61 en SSR Technical InformationFirman SyahÎncă nu există evaluări
- P.E Ug Lab ManualDocument52 paginiP.E Ug Lab ManualSonali SinghÎncă nu există evaluări
- Basic Electronic Circuits Explained - Beginner's Guide To Electronics - Homemade Circuit ProjectsDocument85 paginiBasic Electronic Circuits Explained - Beginner's Guide To Electronics - Homemade Circuit ProjectsJuan fernando RoldanÎncă nu există evaluări
- Bta16 600B PDFDocument1 paginăBta16 600B PDFMasum uddin mondolÎncă nu există evaluări
- Samsung ML-2850 Series ML-2850D / ML-2851ND Service ManualDocument151 paginiSamsung ML-2850 Series ML-2850D / ML-2851ND Service ManualVicent Selfa Oliver100% (10)
- Toshiba OptocouplersDocument80 paginiToshiba OptocouplersNOEL VELASQUEZÎncă nu există evaluări
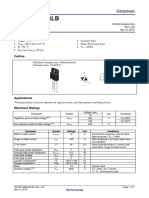
- Datasheet - HK bcr12fm-14lbbb0 7074219Document8 paginiDatasheet - HK bcr12fm-14lbbb0 7074219phetronyo ferreira de oliveiraÎncă nu există evaluări
- Triac Based Light ControllerDocument3 paginiTriac Based Light Controllervijay bÎncă nu există evaluări
- Electric Circuits and Electron Device Lab ManualDocument24 paginiElectric Circuits and Electron Device Lab ManualSuganthan Dboss100% (1)
- MZ QstartDocument42 paginiMZ Qstartkhanh.vecÎncă nu există evaluări
- Rizal Technological University College of Engineering and Industrial Technology Boni Avenue, City of MandaluyongDocument4 paginiRizal Technological University College of Engineering and Industrial Technology Boni Avenue, City of MandaluyongTech ProfessorÎncă nu există evaluări
- Why Use Isolated Signal ConditionersDocument9 paginiWhy Use Isolated Signal ConditionersshajilÎncă nu există evaluări
- Power Electronics QuizDocument23 paginiPower Electronics QuizHardeep Singh Kang75% (4)
- ELectrician 4 Thsem NSQFDocument38 paginiELectrician 4 Thsem NSQFAbhimanyu Kilania100% (3)
- Optoelectronics: Application Note Solid State Relay and Application CircuitsDocument13 paginiOptoelectronics: Application Note Solid State Relay and Application Circuitsght113Încă nu există evaluări
- European Type Designation Code SystemDocument16 paginiEuropean Type Designation Code Systemsarantapodarusa4009Încă nu există evaluări
- Department of Electrical & Electronics Engg.: BEV Sem (Ex) Experiment No - 1 Aim: Apparatus RequiredDocument44 paginiDepartment of Electrical & Electronics Engg.: BEV Sem (Ex) Experiment No - 1 Aim: Apparatus Requiredvkdkris75% (4)
- Z0410 ManualDocument6 paginiZ0410 ManualRKMÎncă nu există evaluări
- Voltage Dimmer PresentationDocument1 paginăVoltage Dimmer PresentationMushood AmjadÎncă nu există evaluări
- P1000 Amplifier: Service ManualDocument32 paginiP1000 Amplifier: Service ManualDexter MorganÎncă nu există evaluări
- Thyristor: From Wikipedia, The Free EncyclopediaDocument7 paginiThyristor: From Wikipedia, The Free EncyclopediaFadila LazimÎncă nu există evaluări
- An Quadrants I and IIIDocument6 paginiAn Quadrants I and IIIADVgamerÎncă nu există evaluări
- Tentative: Triac Drivers Programmable Controllers AC-Output Modules Solid-State RelaysDocument6 paginiTentative: Triac Drivers Programmable Controllers AC-Output Modules Solid-State RelaysGabriel GriecoÎncă nu există evaluări