S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Sallen Key & Butter WorthDocument5 paginiSallen Key & Butter WorthJosué ZamoraÎncă nu există evaluări
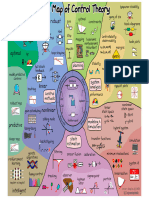
- Fundamentals of Control r1 6 PDFDocument79 paginiFundamentals of Control r1 6 PDFsarathÎncă nu există evaluări
- Efficient Drum Level Control For SteamDocument6 paginiEfficient Drum Level Control For SteamsumeghÎncă nu există evaluări
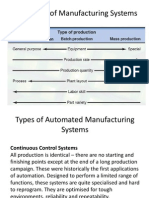
- Automated Manufacturing SystemsDocument25 paginiAutomated Manufacturing SystemsSoto KunÎncă nu există evaluări
- Workbook Pneumatics Basic LevelDocument168 paginiWorkbook Pneumatics Basic Levelvrjr57% (7)
- Control System Examples - CH 1 - 7 - Sept 2017Document411 paginiControl System Examples - CH 1 - 7 - Sept 2017Karthick PN0% (1)
- DSP Manual - ECE IDPDocument62 paginiDSP Manual - ECE IDPNARENDRAÎncă nu există evaluări
- KE01-A1-500-MT-I-HL-0001-000-P01 Instrument Loop Diagram FFU500,520,530,620Document293 paginiKE01-A1-500-MT-I-HL-0001-000-P01 Instrument Loop Diagram FFU500,520,530,620Marinovic Zoran100% (1)
- Buck Converter Modeling, Control, and Compensator DesignDocument56 paginiBuck Converter Modeling, Control, and Compensator DesignNiraj SinghÎncă nu există evaluări
- Atoms BDocument293 paginiAtoms Brashm006ranjanÎncă nu există evaluări
- Speed Control of DC MachineDocument5 paginiSpeed Control of DC MachineNoorAhmedÎncă nu există evaluări
- Modeling A Third Order Noninteracting Liquid Level Tank System Empirically and TheoreticallyDocument6 paginiModeling A Third Order Noninteracting Liquid Level Tank System Empirically and TheoreticallyRafael Rubio NuñezÎncă nu există evaluări
- Theory of Robot ControlDocument398 paginiTheory of Robot ControlAnonymous PWLcxxQÎncă nu există evaluări
- PID ControllersDocument58 paginiPID Controllerss12originalÎncă nu există evaluări
- IO Beckhoff BK52x0 Manual PDFDocument32 paginiIO Beckhoff BK52x0 Manual PDFPavel LobanovÎncă nu există evaluări
- Tarjeta VelocidadDocument9 paginiTarjeta Velocidaddiego100% (1)
- Advances in Vibration Engineering and Structural Dynamics PDFDocument378 paginiAdvances in Vibration Engineering and Structural Dynamics PDFAbigor45100% (1)
- Matlab NootbookDocument18 paginiMatlab Nootbookengrmishtiaq100% (1)
- CNC MachinesDocument9 paginiCNC MachinesMohamed El-WakilÎncă nu există evaluări
- ME451: Control SystemsDocument60 paginiME451: Control Systemsarunkumar SÎncă nu există evaluări
- Outline Een 407Document5 paginiOutline Een 407Sadia Sultana LikhanÎncă nu există evaluări
- UBC ELEC 301 MP Report 4Document7 paginiUBC ELEC 301 MP Report 4ednangiaÎncă nu există evaluări
- UNIT-4 FinalDocument70 paginiUNIT-4 FinalanandbabugopathotiÎncă nu există evaluări
- ISA CSE Study Guide - 4th EditionDocument116 paginiISA CSE Study Guide - 4th EditionDominic Francia75% (4)
- Process Design and Control: Course Code Monday & FridayDocument37 paginiProcess Design and Control: Course Code Monday & FridayElia SaadÎncă nu există evaluări
- Line Following With PID AlgorithmDocument12 paginiLine Following With PID AlgorithmJason RichardsonÎncă nu există evaluări
- Linear Control Systems CourseDocument2 paginiLinear Control Systems CourseBehzad SamadiÎncă nu există evaluări
- Solution A3 NPTEL Control Engg Jan April 2020Document12 paginiSolution A3 NPTEL Control Engg Jan April 2020Akhil Nameirakpam100% (1)
- Modern Irrigation Systems Towards FuzzyDocument9 paginiModern Irrigation Systems Towards Fuzzyshaikshaa007100% (8)