S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5784)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
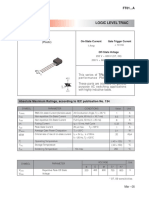
- LOGIC LEVEL TRIAC TECHNICAL SPECIFICATIONSDocument4 paginiLOGIC LEVEL TRIAC TECHNICAL SPECIFICATIONSAnatoly WolkoffÎncă nu există evaluări
- Halogen 12vDocument17 paginiHalogen 12veryÎncă nu există evaluări
- EEE-338 Power Electronics Lab Manual FAll2021Document66 paginiEEE-338 Power Electronics Lab Manual FAll2021Muhammad DawoodÎncă nu există evaluări
- Fuji Power MOSFET Power Calculation Method: Design ToolDocument7 paginiFuji Power MOSFET Power Calculation Method: Design ToolAshish KushwahaÎncă nu există evaluări
- On Modelling Iron Core NonlinearitiesDocument9 paginiOn Modelling Iron Core Nonlinearitiesjdjjarami100% (1)
- Determination of Ash in BiomassDocument8 paginiDetermination of Ash in Biomassmarta_trninicÎncă nu există evaluări
- Inteligen 200: Global GuideDocument824 paginiInteligen 200: Global GuideHuỳnh Thanh LiêmÎncă nu există evaluări
- A Controversial Issue - Power Components in Nonsinusoidal Single-Phase SystemsDocument5 paginiA Controversial Issue - Power Components in Nonsinusoidal Single-Phase SystemsJohnSnowlyÎncă nu există evaluări
- A Dynamic Pspice Model For High-Frequency Fluorescent... (Tao F., Etc.)Document6 paginiA Dynamic Pspice Model For High-Frequency Fluorescent... (Tao F., Etc.)a7eeveeÎncă nu există evaluări
- Power Inverter 12VDC To 230VAC 3000WDocument19 paginiPower Inverter 12VDC To 230VAC 3000WGhazali Zuberi100% (4)
- Iso 20816 8 2018 en PDFDocument11 paginiIso 20816 8 2018 en PDFEdwin Bermejo75% (4)
- MODULE in Consumer ElectronicsDocument129 paginiMODULE in Consumer ElectronicsNyepni NelmiÎncă nu există evaluări
- E-learning material on basic electrical engineeringDocument76 paginiE-learning material on basic electrical engineeringkunal beheraÎncă nu există evaluări
- Physics 2 Lab ManualDocument118 paginiPhysics 2 Lab ManualAl Anood Al AmeriÎncă nu există evaluări
- Zohdy 1989Document9 paginiZohdy 1989Raul Marihuan GonzálezÎncă nu există evaluări
- 1 - What's The Difference Between RMS and Peak Watts - Electronic DesignDocument9 pagini1 - What's The Difference Between RMS and Peak Watts - Electronic DesignKai Sheng SimÎncă nu există evaluări
- 8kW Power-Meter H M 8 1 1 5 - 2: ManualDocument18 pagini8kW Power-Meter H M 8 1 1 5 - 2: ManualErick NarváezÎncă nu există evaluări
- Problem Set BAsic EE MidtermDocument1 paginăProblem Set BAsic EE Midtermbleh33% (3)
- Measurement and Instrumentation Lecture NotesDocument73 paginiMeasurement and Instrumentation Lecture NotesRakesh Thapliyal83% (6)
- Fts Batara Mooring DesignDocument42 paginiFts Batara Mooring DesignBaluqia AkhbarÎncă nu există evaluări
- Selective Coordination: Industry Application IA01200002EDocument52 paginiSelective Coordination: Industry Application IA01200002EPhathutshedzo Bincho MukwevhoÎncă nu există evaluări
- 9702 Electromagnetism AllDocument31 pagini9702 Electromagnetism AllAsha D'saÎncă nu există evaluări
- (1991) - M. Kizilcay T. Pniok - Digital Simulation of Fault Arcs in Power SystemsDocument6 pagini(1991) - M. Kizilcay T. Pniok - Digital Simulation of Fault Arcs in Power Systemsluan balbinoÎncă nu există evaluări
- Data Sheet: Thin Film Chip ResistorsDocument9 paginiData Sheet: Thin Film Chip ResistorslalithkumartÎncă nu există evaluări
- Simeas P Complete Manual Feb2004Document142 paginiSimeas P Complete Manual Feb2004gabriel_petre2001Încă nu există evaluări
- Electrical and Instrumentation (E&I) Engineering For Oil and Gas FacilitiesDocument22 paginiElectrical and Instrumentation (E&I) Engineering For Oil and Gas Facilitiestaibi aliÎncă nu există evaluări
- 2017-02 - SE - Tech Note - PQ ION Meters & EN50160Document12 pagini2017-02 - SE - Tech Note - PQ ION Meters & EN50160Yap Kuan HowÎncă nu există evaluări
- BioNavis AN108 Performance SPRDocument2 paginiBioNavis AN108 Performance SPRcaturro77Încă nu există evaluări
- Electrical Science, ES 107, 1st Sem - Mid Sem Exam PaperDocument6 paginiElectrical Science, ES 107, 1st Sem - Mid Sem Exam PaperKartik AgrawalÎncă nu există evaluări
- MRP List: Think Innovation. Think RishabhDocument69 paginiMRP List: Think Innovation. Think RishabhSukhirthan SenthilkumarÎncă nu există evaluări