S-ar putea să vă placă și
- Smoke Alarm Maintenance ChecklistDocument2 paginiSmoke Alarm Maintenance Checklistananthu.u100% (2)
- King-Rook Vs King With Neural NetworksDocument10 paginiKing-Rook Vs King With Neural NetworksfuzzieÎncă nu există evaluări
- PSC Girder MethodologyDocument12 paginiPSC Girder MethodologySaurabh KumarÎncă nu există evaluări
- Neural NetworksDocument12 paginiNeural NetworksdsjcfnpsdufbvpÎncă nu există evaluări
- Major Classes of Neural NetworksDocument21 paginiMajor Classes of Neural Networksbhaskar rao mÎncă nu există evaluări
- Character Recognition Using Neural Networks: Rókus Arnold, Póth MiklósDocument4 paginiCharacter Recognition Using Neural Networks: Rókus Arnold, Póth MiklósSharath JagannathanÎncă nu există evaluări
- Pattern Classification of Back-Propagation Algorithm Using Exclusive Connecting NetworkDocument5 paginiPattern Classification of Back-Propagation Algorithm Using Exclusive Connecting NetworkEkin RafiaiÎncă nu există evaluări
- Module 3.2 Time Series Forecasting LSTM ModelDocument23 paginiModule 3.2 Time Series Forecasting LSTM ModelDuane Eugenio AniÎncă nu există evaluări
- A Study of Neural Network Algorithms: Namrata AnejaDocument3 paginiA Study of Neural Network Algorithms: Namrata Anejawww.irjes.comÎncă nu există evaluări
- UNIT IV - Neural NetworksDocument7 paginiUNIT IV - Neural Networkslokesh KoppanathiÎncă nu există evaluări
- Fundamentals of Artificial Neural NetworksDocument27 paginiFundamentals of Artificial Neural Networksbhaskar rao mÎncă nu există evaluări
- BACK PROPAGATION Cluster 4Document45 paginiBACK PROPAGATION Cluster 4MonikaÎncă nu există evaluări
- Performance Evaluation of Artificial Neural Networks For Spatial Data AnalysisDocument15 paginiPerformance Evaluation of Artificial Neural Networks For Spatial Data AnalysistalktokammeshÎncă nu există evaluări
- Unit 2 v1.Document41 paginiUnit 2 v1.Kommi Venkat sakethÎncă nu există evaluări
- Unit Iv DMDocument58 paginiUnit Iv DMSuganthi D PSGRKCWÎncă nu există evaluări
- Back-Propagation Algorithm of CHBPN CodeDocument10 paginiBack-Propagation Algorithm of CHBPN Codesch203Încă nu există evaluări
- Artificial Neural Networks: 3.1) IntroductionDocument24 paginiArtificial Neural Networks: 3.1) IntroductionNmg KumarÎncă nu există evaluări
- Creep Modelling of Polyolefins Using Artificial Neural NetworksDocument15 paginiCreep Modelling of Polyolefins Using Artificial Neural Networksklomps_jrÎncă nu există evaluări
- EE 5322 Neural Networks NotesDocument14 paginiEE 5322 Neural Networks NotesShyam536Încă nu există evaluări
- Neural Network Simulations in MatlabDocument5 paginiNeural Network Simulations in MatlablrdseekerÎncă nu există evaluări
- Principles of Training Multi-Layer Neural Network Using BackpropagationDocument15 paginiPrinciples of Training Multi-Layer Neural Network Using Backpropagationkamalamdharman100% (1)
- Session 1Document8 paginiSession 1Ramu ThommandruÎncă nu există evaluări
- Ann Lab Manual 2Document7 paginiAnn Lab Manual 2Manak JainÎncă nu există evaluări
- Evolving Structure and Function of Neurocontrollers: Stochastic Synthesis) Outlined in Section 2 Is Inspired by A BiDocument6 paginiEvolving Structure and Function of Neurocontrollers: Stochastic Synthesis) Outlined in Section 2 Is Inspired by A BiQaiser AbbasÎncă nu există evaluări
- Optimal Brain Damage: 598 Le Cun, Denker and SollaDocument8 paginiOptimal Brain Damage: 598 Le Cun, Denker and Sollahugo pÎncă nu există evaluări
- Training Neural Networks With GA Hybrid AlgorithmsDocument12 paginiTraining Neural Networks With GA Hybrid Algorithmsjkl316Încă nu există evaluări
- Distribution of The Tree Parity Machine Synchronization TimeDocument8 paginiDistribution of The Tree Parity Machine Synchronization Timejeremy_scerriÎncă nu există evaluări
- A Simplified Generative Model Based On Gradient Descent and Mean Square ErrorDocument8 paginiA Simplified Generative Model Based On Gradient Descent and Mean Square ErrorOmar Lopez-RinconÎncă nu există evaluări
- Unit 4Document9 paginiUnit 4akkiketchumÎncă nu există evaluări
- Assignment - Role of Computational Techniques On Proposed ResearchDocument9 paginiAssignment - Role of Computational Techniques On Proposed ResearchSnehamoy DharÎncă nu există evaluări
- A Multilayer Feed-Forward Neural NetworkDocument9 paginiA Multilayer Feed-Forward Neural NetworkdebmatraÎncă nu există evaluări
- Dietmar Heinke and Fred H. Hamker - Comparing Neural Networks: A Benchmark On Growing Neural Gas, Growing Cell Structures, and Fuzzy ARTMAPDocument13 paginiDietmar Heinke and Fred H. Hamker - Comparing Neural Networks: A Benchmark On Growing Neural Gas, Growing Cell Structures, and Fuzzy ARTMAPTuhmaÎncă nu există evaluări
- Multi-Layer Feed-Forward NetworksDocument6 paginiMulti-Layer Feed-Forward NetworksVishnu DasÎncă nu există evaluări
- Genetic Algorithms Versus Traditional MethodsDocument7 paginiGenetic Algorithms Versus Traditional MethodsPeeyush SinhaÎncă nu există evaluări
- Artifical Neural NetworkDocument7 paginiArtifical Neural NetworkAby MathewÎncă nu există evaluări
- Hybrid Training Algorithm For RBF Network: M. Y. MashorDocument17 paginiHybrid Training Algorithm For RBF Network: M. Y. MashormauricetappaÎncă nu există evaluări
- Feedforward Neural NetworkDocument5 paginiFeedforward Neural NetworkSreejith MenonÎncă nu există evaluări
- CT1 NNDL Question BankDocument8 paginiCT1 NNDL Question BankTECH TALKSÎncă nu există evaluări
- Radial Basis Function Networks: Yousef AkhlaghiDocument28 paginiRadial Basis Function Networks: Yousef Akhlaghimoh_750571194Încă nu există evaluări
- Neural Network Learning Without BackpropagationDocument39 paginiNeural Network Learning Without BackpropagationShujon NahaÎncă nu există evaluări
- Unit 4Document38 paginiUnit 4Abhinav KaushikÎncă nu există evaluări
- Neural Network Based Estimation of Power Electronic WavesDocument6 paginiNeural Network Based Estimation of Power Electronic WavesJandfor Tansfg ErrottÎncă nu există evaluări
- A Versatile Genetic Algorithm For Network PlanningDocument7 paginiA Versatile Genetic Algorithm For Network PlanningquocnknetÎncă nu există evaluări
- Neural Network Weight Selection Using Genetic AlgorithmsDocument17 paginiNeural Network Weight Selection Using Genetic AlgorithmsChevalier De BalibariÎncă nu există evaluări
- Machine Learning: Bilal KhanDocument53 paginiMachine Learning: Bilal KhanOsama InayatÎncă nu există evaluări
- From: First IEE International Conference On Artificial Neural Networks. IEE Conference Publication 313Document18 paginiFrom: First IEE International Conference On Artificial Neural Networks. IEE Conference Publication 313Ahmed KhazalÎncă nu există evaluări
- Ann MJJ-1Document64 paginiAnn MJJ-1RohitÎncă nu există evaluări
- Vehicular Pollution Modeling Using Artificial Neural Network TechniqueDocument7 paginiVehicular Pollution Modeling Using Artificial Neural Network TechniqueARVINDÎncă nu există evaluări
- Approximate Linear Programming For Network Control: Column Generation and SubproblemsDocument20 paginiApproximate Linear Programming For Network Control: Column Generation and SubproblemsPervez AhmadÎncă nu există evaluări
- 2020a1t182 Assgn1Document9 pagini2020a1t182 Assgn1Aahib NazirÎncă nu există evaluări
- Signal Correlation Prediction Using Convolutional Neural NetworksDocument12 paginiSignal Correlation Prediction Using Convolutional Neural NetworksWesley BecariÎncă nu există evaluări
- Artificial Intelligence & Neural Networks Unit-5 Basics of NNDocument16 paginiArtificial Intelligence & Neural Networks Unit-5 Basics of NNMukesh50% (2)
- Fuzzy ART Neural Network Algorithm For Classifying The Power System FaultsDocument9 paginiFuzzy ART Neural Network Algorithm For Classifying The Power System FaultsSwathy SasidharanÎncă nu există evaluări
- Automated Classification of Power Quality Disturbances Using SVM and RBF NetworksDocument7 paginiAutomated Classification of Power Quality Disturbances Using SVM and RBF NetworksbajricaÎncă nu există evaluări
- Assignment - 4Document24 paginiAssignment - 4Durga prasad TÎncă nu există evaluări
- Transfer Functions: Hidden Possibilities For Better Neural NetworksDocument14 paginiTransfer Functions: Hidden Possibilities For Better Neural NetworksDana AbkhÎncă nu există evaluări
- Multiple-Layer Networks Backpropagation AlgorithmsDocument25 paginiMultiple-Layer Networks Backpropagation AlgorithmsmedhapurohitÎncă nu există evaluări
- Prediction of Process Parameters For Optimal Material Removal Rate Using Artificial Neural Network (ANN) TechniqueDocument7 paginiPrediction of Process Parameters For Optimal Material Removal Rate Using Artificial Neural Network (ANN) TechniqueKrishna MurthyÎncă nu există evaluări
- Artificial Neural Network Seminar ReportDocument15 paginiArtificial Neural Network Seminar ReportNeha Singh50% (2)
- Evaluate Neural Network For Vehicle Routing ProblemDocument3 paginiEvaluate Neural Network For Vehicle Routing ProblemIDESÎncă nu există evaluări
- Radial Basis Networks: Fundamentals and Applications for The Activation Functions of Artificial Neural NetworksDe la EverandRadial Basis Networks: Fundamentals and Applications for The Activation Functions of Artificial Neural NetworksÎncă nu există evaluări
- Backpropagation: Fundamentals and Applications for Preparing Data for Training in Deep LearningDe la EverandBackpropagation: Fundamentals and Applications for Preparing Data for Training in Deep LearningÎncă nu există evaluări
- Automatic Stage Creation Program Tool by Cybaster: 1) What Is This Thing ?Document3 paginiAutomatic Stage Creation Program Tool by Cybaster: 1) What Is This Thing ?zaqweasÎncă nu există evaluări
- Turbo A Fighting Game RPGDocument23 paginiTurbo A Fighting Game RPGzaqweasÎncă nu există evaluări
- PORTAL - RulebookDocument84 paginiPORTAL - RulebookzaqweasÎncă nu există evaluări
- PlanMaker Free Manual (En)Document699 paginiPlanMaker Free Manual (En)zaqweasÎncă nu există evaluări
- Attribute Changer 10 User GuideDocument25 paginiAttribute Changer 10 User GuidezaqweasÎncă nu există evaluări
- The Rorschach Interaction Scale As A Potential Predictor of CancerDocument15 paginiThe Rorschach Interaction Scale As A Potential Predictor of CancerzaqweasÎncă nu există evaluări
- PPAPDocument2 paginiPPAPVlad NitaÎncă nu există evaluări
- Meinberg ManualDocument214 paginiMeinberg ManualLeonard NicolaeÎncă nu există evaluări
- Lesson1. TriangulationDocument21 paginiLesson1. TriangulationTristania Leighan DeypuyartÎncă nu există evaluări
- Electromagnetic CompatibilityDocument12 paginiElectromagnetic Compatibilityoadipphone7031Încă nu există evaluări
- Pre - Use Inspection Qualification: Date: Equipment Welding Machine Serial Number Model: LocationDocument3 paginiPre - Use Inspection Qualification: Date: Equipment Welding Machine Serial Number Model: LocationEugenio Jr. MatesÎncă nu există evaluări
- No35-Inclined Roof SystemDocument24 paginiNo35-Inclined Roof SystemKitanovic NenadÎncă nu există evaluări
- Assignment 1Document4 paginiAssignment 1MikeyÎncă nu există evaluări
- SensoNODE Catalog 3864 Feb 2015Document28 paginiSensoNODE Catalog 3864 Feb 2015btsgr parkerÎncă nu există evaluări
- Mapplet InformaticaDocument3 paginiMapplet InformaticaRamesh Babu BabuÎncă nu există evaluări
- KYK CatalogueDocument94 paginiKYK Cataloguepriya kumariÎncă nu există evaluări
- Chapter 2 Review of Related LiteratureDocument16 paginiChapter 2 Review of Related LiteratureRodel D Dosano50% (6)
- 02 - Student Lesson 2 Pile Driving SystemDocument91 pagini02 - Student Lesson 2 Pile Driving SystemdannyzuanÎncă nu există evaluări
- MMTI Literature ReviewDocument39 paginiMMTI Literature ReviewGargee GhoshÎncă nu există evaluări
- Supercontryx®: Innovative Glass For X - Ray ProtectionDocument2 paginiSupercontryx®: Innovative Glass For X - Ray ProtectionUsman AhmedÎncă nu există evaluări
- AÇO - DIN17100 St52-3Document1 paginăAÇO - DIN17100 St52-3Paulo Henrique NascimentoÎncă nu există evaluări
- BC 20s HandbuchDocument173 paginiBC 20s HandbuchmanoharÎncă nu există evaluări
- Master Antenna Television System and Satellite SystemDocument6 paginiMaster Antenna Television System and Satellite SystemMHEP_DANIELÎncă nu există evaluări
- Grabi Al Jubail ProfileDocument130 paginiGrabi Al Jubail ProfileSlid ISO100% (1)
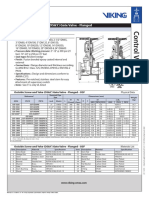
- Outside Screw and Yoke (OS&Y) Gate Valve - Flanged: Technical FeaturesDocument2 paginiOutside Screw and Yoke (OS&Y) Gate Valve - Flanged: Technical FeaturesMark Louie GuintoÎncă nu există evaluări
- Gate Ee 1991Document7 paginiGate Ee 1991Bhavani Chandra UniqueÎncă nu există evaluări
- MV Reg CleanDocument32 paginiMV Reg CleanJose Alberto CostaÎncă nu există evaluări
- Sample Electrical LayoutDocument1 paginăSample Electrical LayoutBentesais Bente UnoÎncă nu există evaluări
- Export Dataset To PDF in ASP NetDocument2 paginiExport Dataset To PDF in ASP NetWilliamÎncă nu există evaluări
- ABB LMU 574 - mcd80Document12 paginiABB LMU 574 - mcd80gadware2011bplÎncă nu există evaluări
- AY 2015-16cvbbnjDocument245 paginiAY 2015-16cvbbnjSyed Abdul AzizÎncă nu există evaluări
- Module D Exercise ModD - QB09 - EngDocument4 paginiModule D Exercise ModD - QB09 - Engapi-3812894Încă nu există evaluări
- Watertight Doors On Ships: Types, Maintenance & SOLAS RegulationsDocument16 paginiWatertight Doors On Ships: Types, Maintenance & SOLAS Regulationsgeorgesaguna100% (1)
- Machine Safeguarding at The Point of Operation: A Guide For Finding Solutions To Machine HazardsDocument60 paginiMachine Safeguarding at The Point of Operation: A Guide For Finding Solutions To Machine HazardsYovanyCalPadillaÎncă nu există evaluări