S-ar putea să vă placă și
- Installation and Operation Manual: GS16 Gas Metering SystemDocument78 paginiInstallation and Operation Manual: GS16 Gas Metering SystemUsman Ali100% (1)
- DevOps Tutorial For Begin.9093468.PowerpointDocument7 paginiDevOps Tutorial For Begin.9093468.Powerpointrajverma10in2002Încă nu există evaluări
- Obstacle Avoidance Using The KinectDocument5 paginiObstacle Avoidance Using The KinectVan Duc Nguyen100% (2)
- OPS239006 NCE-T Basic NE Configuration ISSUE19Document72 paginiOPS239006 NCE-T Basic NE Configuration ISSUE19randydooks100% (2)
- Fatek FBs PLC Complete ManualDocument348 paginiFatek FBs PLC Complete ManualNikos Chatziravdelis72% (18)
- Object Detection and Localization: Academic Session 2022/2023Document37 paginiObject Detection and Localization: Academic Session 2022/2023muhammed suhailÎncă nu există evaluări
- MODULE3Document18 paginiMODULE3Pramathesh BhaktaÎncă nu există evaluări
- Improved Object MarkerDocument5 paginiImproved Object MarkerChhabi Lal AdhikariÎncă nu există evaluări
- Collision Detection: John Amato Pixelsplash SoftwareDocument5 paginiCollision Detection: John Amato Pixelsplash SoftwareEverton KozloskiÎncă nu există evaluări
- Pain EngineDocument44 paginiPain Enginemagnux intelcomÎncă nu există evaluări
- Local and GlobalDocument20 paginiLocal and GloballcsimaoÎncă nu există evaluări
- Siemens Documentation - MirrorDocument6 paginiSiemens Documentation - MirroranupÎncă nu există evaluări
- Computer GraphicsDocument10 paginiComputer Graphicsusmanrather78Încă nu există evaluări
- REPORT PythonDocument40 paginiREPORT PythonimrozÎncă nu există evaluări
- Xpresso BasicsDocument5 paginiXpresso BasicsCarlos CoralÎncă nu există evaluări
- Z Simple Non-Sequential System PDFDocument16 paginiZ Simple Non-Sequential System PDFbournwill100% (1)
- Object Detection Using Python OpenCVDocument23 paginiObject Detection Using Python OpenCVprashanthkumar007Încă nu există evaluări
- Blender Shaders 24Document11 paginiBlender Shaders 24keeyanÎncă nu există evaluări
- Autonomous Robot OperationDocument16 paginiAutonomous Robot OperationDiego CorreaÎncă nu există evaluări
- Lab Session 9: Object Detection and Counting Using Region Properties With Image Region AnalyzerDocument3 paginiLab Session 9: Object Detection and Counting Using Region Properties With Image Region AnalyzerSurfraz Bin Amir0% (1)
- Final MaterialDocument55 paginiFinal MaterialbekemaÎncă nu există evaluări
- VulcanDocument8 paginiVulcanalpianusÎncă nu există evaluări
- Chapter 6 - Creating Animated AppsDocument19 paginiChapter 6 - Creating Animated AppsVin FajardoÎncă nu există evaluări
- Single Object Tracking System by Using LabviewDocument5 paginiSingle Object Tracking System by Using LabviewEditor IJRITCCÎncă nu există evaluări
- Cs411 Current Midterm Todays Papers Solved by Zain NasarDocument8 paginiCs411 Current Midterm Todays Papers Solved by Zain NasarMontha HaiderÎncă nu există evaluări
- Transforming Auto-Encoders: Abstract. The Artificial Neural Networks That Are Used To RecognizeDocument8 paginiTransforming Auto-Encoders: Abstract. The Artificial Neural Networks That Are Used To RecognizeNadeem ShoukatÎncă nu există evaluări
- V Rep10Document47 paginiV Rep10Claudiu MinaÎncă nu există evaluări
- CG Model QXN SolnDocument15 paginiCG Model QXN SolnBishal ShahiÎncă nu există evaluări
- Osc DLL DOCDocument30 paginiOsc DLL DOCswamynathanedwinÎncă nu există evaluări
- 4.assess The Accuracy of A Perviousness Classification - Learn ArcGISDocument18 pagini4.assess The Accuracy of A Perviousness Classification - Learn ArcGISPUJARANI BISHOYIÎncă nu există evaluări
- First Technique: MAX's "Level of Detail" UtilityDocument2 paginiFirst Technique: MAX's "Level of Detail" Utilityicen00bÎncă nu există evaluări
- Object Detection and Identification A Project Report: November 2019Document45 paginiObject Detection and Identification A Project Report: November 2019Shivank BansalÎncă nu există evaluări
- Integrating Visual and Range Data For Robotic Object DetectionDocument12 paginiIntegrating Visual and Range Data For Robotic Object DetectionMahesh MuragÎncă nu există evaluări
- CG Unit-5Document5 paginiCG Unit-5Vathicoming Vikky100% (1)
- Object Recognition ROS-KINECTDocument9 paginiObject Recognition ROS-KINECTyogeshkarna100% (1)
- Unit-7: Visible-Surface Detection MethodsDocument13 paginiUnit-7: Visible-Surface Detection Methodsmeghal prajapatiÎncă nu există evaluări
- 2D ViewingDocument13 pagini2D ViewingTejas DesaiÎncă nu există evaluări
- Visible-Surface Detection Methods: CS3162 Introduction To Computer GraphicsDocument10 paginiVisible-Surface Detection Methods: CS3162 Introduction To Computer GraphicsathiraÎncă nu există evaluări
- Object Detection and Identification A Project Report: November 2019Document45 paginiObject Detection and Identification A Project Report: November 2019Animesh PrasadÎncă nu există evaluări
- C,,ls381e01sDocument6 paginiC,,ls381e01sNadine Abu RumanÎncă nu există evaluări
- Assignment-2:DIP: Mr. Victor Mageto CP10101610245Document10 paginiAssignment-2:DIP: Mr. Victor Mageto CP10101610245Vijayendravarma DanduÎncă nu există evaluări
- Scenegraphs Past, Present and FutureDocument20 paginiScenegraphs Past, Present and FutureSharath100% (4)
- Icra10 MultiCameraObjectDetectionDocument8 paginiIcra10 MultiCameraObjectDetectionsigmateÎncă nu există evaluări
- Victor's Video Scaler Cook BookDocument30 paginiVictor's Video Scaler Cook BookgursimranjitsinghÎncă nu există evaluări
- CV Assignment 2 RecognitionARDocument5 paginiCV Assignment 2 RecognitionARPaul BrgrÎncă nu există evaluări
- Real Time Doors and Windows Recognition in Opencv UsingDocument8 paginiReal Time Doors and Windows Recognition in Opencv Usingcesar hdzÎncă nu există evaluări
- Chapter 6 Selecting Objects and Setting Object Properties: Cross-ReferenceDocument11 paginiChapter 6 Selecting Objects and Setting Object Properties: Cross-ReferencekeeyanÎncă nu există evaluări
- Virtual Mouse Using A Webcam - Kazim - SekerogluDocument7 paginiVirtual Mouse Using A Webcam - Kazim - SekerogluVăn CôngÎncă nu există evaluări
- Z BufferDocument1 paginăZ Bufferjaneman421Încă nu există evaluări
- CGA Sem 4Document15 paginiCGA Sem 4Sam SepiolÎncă nu există evaluări
- Biomedical Image Analysis by Program "Vision Assistant" and "Labview"Document4 paginiBiomedical Image Analysis by Program "Vision Assistant" and "Labview"edbraga-1Încă nu există evaluări
- Object Detection Using Haar-Cascade ClassifierDocument12 paginiObject Detection Using Haar-Cascade Classifiermarwen sellamiÎncă nu există evaluări
- Scatter PDFDocument4 paginiScatter PDFlucian_parleaÎncă nu există evaluări
- The Ultimate Guide To Object DetectionDocument16 paginiThe Ultimate Guide To Object Detectionadalberto soplatetasÎncă nu există evaluări
- Nips EyebmDocument9 paginiNips EyebmmikeÎncă nu există evaluări
- Robot VisionDocument6 paginiRobot VisionHaydee Tu Ya SabesÎncă nu există evaluări
- cs171 hw1 Solutions PDFDocument5 paginics171 hw1 Solutions PDFsingu ruthwikÎncă nu există evaluări
- Kinect ManualDocument16 paginiKinect ManualosmincitofÎncă nu există evaluări
- Multi-Camera Object Detection For Robotics: Adam Coates Andrew Y. NGDocument8 paginiMulti-Camera Object Detection For Robotics: Adam Coates Andrew Y. NGAbbé BusoniÎncă nu există evaluări
- Computer Vision System Toolbox - MATLABDocument10 paginiComputer Vision System Toolbox - MATLABIram AslamÎncă nu există evaluări
- Multimode Foreground Detection Using Surf Algorithm: Abstract-Video Surveillance Is Active Research Topic inDocument4 paginiMultimode Foreground Detection Using Surf Algorithm: Abstract-Video Surveillance Is Active Research Topic inTechnos_IncÎncă nu există evaluări
- Mark D. Berio BSCpE - 2A ES 1Document8 paginiMark D. Berio BSCpE - 2A ES 1Mark BerioÎncă nu există evaluări
- Hear50265 ch03Document88 paginiHear50265 ch03Suada Bőw WéěžýÎncă nu există evaluări
- Philippine Countryville College: Computer Studies Department Course SyllabusDocument7 paginiPhilippine Countryville College: Computer Studies Department Course SyllabusMat Perater MacoteÎncă nu există evaluări
- GSM Intercom GSM Intercom: Keypad 4 ButtonDocument11 paginiGSM Intercom GSM Intercom: Keypad 4 ButtonHugo KrielÎncă nu există evaluări
- User Manual: Powermust 400/600/800 UsbDocument10 paginiUser Manual: Powermust 400/600/800 UsbEdvinasÎncă nu există evaluări
- Warning: 10-61-4 S650 Service ManualDocument7 paginiWarning: 10-61-4 S650 Service Manualsixin93551Încă nu există evaluări
- VC-A61P HD Camera: User Manual - EnglishDocument47 paginiVC-A61P HD Camera: User Manual - EnglishbaltadoroseÎncă nu există evaluări
- Configuring Telnet Using An Username & Password: Khawar Butt Ccie # 12353 (R/S, Security, SP, DC, Voice, Storage & Ccde)Document7 paginiConfiguring Telnet Using An Username & Password: Khawar Butt Ccie # 12353 (R/S, Security, SP, DC, Voice, Storage & Ccde)Avishkar GoteÎncă nu există evaluări
- KIDUS INTERN SHIP PRESENTATION OldDocument60 paginiKIDUS INTERN SHIP PRESENTATION OldKidus FelekeÎncă nu există evaluări
- Chapter 6 PDFDocument17 paginiChapter 6 PDFRemijus SitepuÎncă nu există evaluări
- Dark Side of Latin America - Informe Sobre Crimen X CriptomonedasDocument11 paginiDark Side of Latin America - Informe Sobre Crimen X CriptomonedasRoberta MunizÎncă nu există evaluări
- CBC - Converter - HDMF 1.7 - CONTRI MP2Document3 paginiCBC - Converter - HDMF 1.7 - CONTRI MP2CICOSAT COLLEGES INC.Încă nu există evaluări
- Defining The Benefits of It Investments in Business PracticeDocument8 paginiDefining The Benefits of It Investments in Business PracticetheatresonicÎncă nu există evaluări
- SOP - Asset Buy Back-26072022Document3 paginiSOP - Asset Buy Back-26072022AroojÎncă nu există evaluări
- BRKCRS 2112Document96 paginiBRKCRS 2112JunÎncă nu există evaluări
- MWR SH00NDocument2 paginiMWR SH00Naandresleo86Încă nu există evaluări
- Webinar Series 2 Lecture 1Document1 paginăWebinar Series 2 Lecture 1Bitan ChakrabortyÎncă nu există evaluări
- Role of Management Information System in Business OrganizationDocument4 paginiRole of Management Information System in Business OrganizationKrishna RajputÎncă nu există evaluări
- UEE31220 - Certificate III in Instrumentation and Control Ausinet InternationalDocument2 paginiUEE31220 - Certificate III in Instrumentation and Control Ausinet InternationalWalter CarranzaÎncă nu există evaluări
- Smart Meter Mapping 3Document2 paginiSmart Meter Mapping 3Rohit SAPÎncă nu există evaluări
- SdadadsDocument4 paginiSdadadsadapa1234Încă nu există evaluări
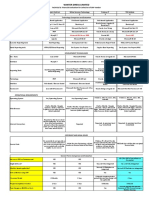
- Erp - Comparative StatementDocument5 paginiErp - Comparative StatementRafsanjani SamirÎncă nu există evaluări
- Lesson Plan (Simple Version) - Term 2Document1 paginăLesson Plan (Simple Version) - Term 2YohanÎncă nu există evaluări
- Verilog HDL A Guide To Digital Design and Synthesis Samir Palnitkar Sunsoft Press 1996Document3 paginiVerilog HDL A Guide To Digital Design and Synthesis Samir Palnitkar Sunsoft Press 1996Pramod Reddy RÎncă nu există evaluări
- Rational Application Developer For WebSphere Software V8 Programming GuideDocument1.946 paginiRational Application Developer For WebSphere Software V8 Programming GuiderusysÎncă nu există evaluări
- NMTC Sub Junior 2022 SolutionsDocument21 paginiNMTC Sub Junior 2022 SolutionsBhakti AgarwalÎncă nu există evaluări
- IT Era Write UpDocument9 paginiIT Era Write UpLei Angeline TabigneÎncă nu există evaluări
- C AssignDocument8 paginiC Assignhimanshu1788Încă nu există evaluări