S-ar putea să vă placă și
- Isie 2012Document6 paginiIsie 2012rfm61Încă nu există evaluări
- What Is A Parallel RobotDocument46 paginiWhat Is A Parallel Robotminh_bk0101Încă nu există evaluări
- Autonomous Landing of An Unmanned Helicopter Based On Vision and Inertial SensingDocument11 paginiAutonomous Landing of An Unmanned Helicopter Based On Vision and Inertial SensingKarthik NiyanthaÎncă nu există evaluări
- Design and Optimization of Backstepping Controller For An Underactuated Autonomous Quadrotor Unmanned Aerial VehicleDocument18 paginiDesign and Optimization of Backstepping Controller For An Underactuated Autonomous Quadrotor Unmanned Aerial VehicleSteve DemirelÎncă nu există evaluări
- Curvature Based Velocity Control System For Mobile Robot: Pengfei Wang and Kosuke SekiyamaDocument6 paginiCurvature Based Velocity Control System For Mobile Robot: Pengfei Wang and Kosuke SekiyamaRavi RanjanÎncă nu există evaluări
- Gaschler 2011 BDocument6 paginiGaschler 2011 BCoke LatÎncă nu există evaluări
- Autocalibration of An Ad Hoc Construction of Multi-Projector DisplaysDocument8 paginiAutocalibration of An Ad Hoc Construction of Multi-Projector DisplaysIonuț AvramescuÎncă nu există evaluări
- Weiss 11 RealDocument7 paginiWeiss 11 RealVũ Tiến DũngÎncă nu există evaluări
- Study On Turbulence Compensation Surveying and Mapping Algorithm of ShipsDocument8 paginiStudy On Turbulence Compensation Surveying and Mapping Algorithm of ShipsCatur Lega WÎncă nu există evaluări
- Mobile Robot Modelling and Autonomous GuidanceDocument6 paginiMobile Robot Modelling and Autonomous GuidanceduonglacbkÎncă nu există evaluări
- Alternative To Feature Matching - High Precision Relative LocalizationDocument7 paginiAlternative To Feature Matching - High Precision Relative LocalizationGaurav VermaÎncă nu există evaluări
- Robot 6 DofDocument5 paginiRobot 6 DofMiguel PérezÎncă nu există evaluări
- 2D 1 2 Visual Servoing Stability Analysis With Respect To Camera Calibration ErrorsDocument7 pagini2D 1 2 Visual Servoing Stability Analysis With Respect To Camera Calibration ErrorsMotasim MustafaÎncă nu există evaluări
- An Evaluation of Camera Calibration MethDocument7 paginiAn Evaluation of Camera Calibration Methximena zeballosÎncă nu există evaluări
- Low-Cost Accelerometers For Robotic Manipulator PerceptionDocument7 paginiLow-Cost Accelerometers For Robotic Manipulator PerceptionAbbé BusoniÎncă nu există evaluări
- Robust Pose Estimation of Moving Objects Using Laser Camera Data For Autonomous Rendezvous & DockingDocument6 paginiRobust Pose Estimation of Moving Objects Using Laser Camera Data For Autonomous Rendezvous & DockingKien Nguyen TrungÎncă nu există evaluări
- Robotic Pool: An Experiment Automatic Potting: Johan Roth3, of Computing, 3dept. of ofDocument6 paginiRobotic Pool: An Experiment Automatic Potting: Johan Roth3, of Computing, 3dept. of ofVansala GanesanÎncă nu există evaluări
- A Multi-State Constraint Kalman FilterDocument8 paginiA Multi-State Constraint Kalman Filteradeelakram03Încă nu există evaluări
- 2 1 2D Visual ServoingDocument13 pagini2 1 2D Visual ServoingPedro Alfonso Patlán RosalesÎncă nu există evaluări
- A Calibration Procedure For The Parallel Robot Delta 4: P. Maurine, E. DombreDocument6 paginiA Calibration Procedure For The Parallel Robot Delta 4: P. Maurine, E. DombreHoracio GeorgeÎncă nu există evaluări
- Learning Vehicular Dynamics, With Application To Modeling HelicoptersDocument8 paginiLearning Vehicular Dynamics, With Application To Modeling Helicoptersneha_automaticÎncă nu există evaluări
- 8DOF KinematicsDocument6 pagini8DOF KinematicsmarbonfÎncă nu există evaluări
- Camera Calibration ThesisDocument5 paginiCamera Calibration Thesislaurahallportland100% (2)
- Analysis of Fractional - Order Robot Axis Dynamics J.M. Rosario, D. Dumur, J.A. Tenreiro MachadoDocument6 paginiAnalysis of Fractional - Order Robot Axis Dynamics J.M. Rosario, D. Dumur, J.A. Tenreiro MachadoVignesh RamakrishnanÎncă nu există evaluări
- Analysis and Implementation of A 6 Dof Stewart Platform-Based Robotic WristDocument13 paginiAnalysis and Implementation of A 6 Dof Stewart Platform-Based Robotic WristAshish MeenaÎncă nu există evaluări
- Self-Tuning Controller For Servo Motor With An Adaptive Disturbance ObserverDocument5 paginiSelf-Tuning Controller For Servo Motor With An Adaptive Disturbance ObserverrezadigitÎncă nu există evaluări
- Cable Suspended Parallel Robot Hanged OnDocument6 paginiCable Suspended Parallel Robot Hanged OnIsmail LahlouÎncă nu există evaluări
- A Dual Quaternion Linear-Quadratic Optimal Controller For Trajectory TrackingDocument6 paginiA Dual Quaternion Linear-Quadratic Optimal Controller For Trajectory TrackingGerardo HernándezÎncă nu există evaluări
- Control of Two-Wheels Inverted Pendulum Mobile Robot Using Full Order Sliding Mode ControlDocument6 paginiControl of Two-Wheels Inverted Pendulum Mobile Robot Using Full Order Sliding Mode Controlc0d3rÎncă nu există evaluări
- Integrated Vision/Inertial Navigation System Design Using Nonlinear FilteringDocument5 paginiIntegrated Vision/Inertial Navigation System Design Using Nonlinear FilteringAndres FelipeÎncă nu există evaluări
- Full Text 01Document7 paginiFull Text 01Voskula ShivakrishnaÎncă nu există evaluări
- Proceedings of The 9th WSEAS International Conference On APPLICATIONS of ELECTRICAL ENGINEERINGDocument7 paginiProceedings of The 9th WSEAS International Conference On APPLICATIONS of ELECTRICAL ENGINEERINGIbrahim SadohÎncă nu există evaluări
- DumasCaroCherifGarnierFuret Robotica2011 HALDocument20 paginiDumasCaroCherifGarnierFuret Robotica2011 HALf1f2f3f4f5cruzÎncă nu există evaluări
- Kalman 3. Robot PaltillDocument9 paginiKalman 3. Robot PaltillTrung KiênÎncă nu există evaluări
- Design and Optimization of An XYZ Parallel Micromanipulator With Flexure HingesDocument26 paginiDesign and Optimization of An XYZ Parallel Micromanipulator With Flexure HingesVijay SakhareÎncă nu există evaluări
- Alcantarilla 10 I Cra 1Document6 paginiAlcantarilla 10 I Cra 1henrydclÎncă nu există evaluări
- Color Object DetectionDocument6 paginiColor Object DetectionEngr EbiÎncă nu există evaluări
- Robot-Sensor System Integration by Means Vision Ultrasonic Sensing For Localization and Recognition ObjectsDocument7 paginiRobot-Sensor System Integration by Means Vision Ultrasonic Sensing For Localization and Recognition ObjectsRavi SharmaÎncă nu există evaluări
- Position Control of Pick and Place Robotic ArmDocument5 paginiPosition Control of Pick and Place Robotic Armavinashs2410_41108610% (1)
- Template Tracking and Visual Servoing For Alignment Tasks With Autonomous Underwater VehiclesDocument6 paginiTemplate Tracking and Visual Servoing For Alignment Tasks With Autonomous Underwater VehiclesnarcisprÎncă nu există evaluări
- 4-Dimensional Control of Remotely Piloted: VehicleDocument6 pagini4-Dimensional Control of Remotely Piloted: VehicleFawaz PartoÎncă nu există evaluări
- Performance Bounds For Cooperative Simultaneous Localization and Mapping (C-SLAM)Document8 paginiPerformance Bounds For Cooperative Simultaneous Localization and Mapping (C-SLAM)MahmoudAbdulGalilÎncă nu există evaluări
- Tracking Control of A Spot Bead Welding Mobile Robot Using Camera SensorDocument7 paginiTracking Control of A Spot Bead Welding Mobile Robot Using Camera SensorViet Nguyen TrungÎncă nu există evaluări
- Advanced Techniques of Industrial Robot Programming 79Document21 paginiAdvanced Techniques of Industrial Robot Programming 79Pablo HernandezÎncă nu există evaluări
- Moosavian2008 SlipDocument6 paginiMoosavian2008 SlipElias GarcíaÎncă nu există evaluări
- Real-Time Stereo Visual Servoing Control of An UAV Having Eight-RotorsDocument11 paginiReal-Time Stereo Visual Servoing Control of An UAV Having Eight-RotorsKarthi KeyanÎncă nu există evaluări
- Eru 2010 SLAM PaperDocument3 paginiEru 2010 SLAM PaperHasala DharmawardenaÎncă nu există evaluări
- Simulating Quadrotor UAVs in Outdoor ScenariosDocument7 paginiSimulating Quadrotor UAVs in Outdoor ScenariosRodolfo Castro E SilvaÎncă nu există evaluări
- Lecture 2 Introduction To RoboticsDocument12 paginiLecture 2 Introduction To RoboticsDomjul KumzhiÎncă nu există evaluări
- Optical Flow Paper181finalDocument7 paginiOptical Flow Paper181finaljohndenningsÎncă nu există evaluări
- 56 421Document10 pagini56 421nguyendattdhÎncă nu există evaluări
- PKM 2003aDocument4 paginiPKM 2003akpk1989Încă nu există evaluări
- Trajectory Planning Notes (Robotics)Document21 paginiTrajectory Planning Notes (Robotics)shreedharkolekar100% (2)
- Robotic System ModellingDocument20 paginiRobotic System ModellingsurajÎncă nu există evaluări
- Experimental Comparison of Trajectory Tracking Algorithms For Nonholonomic Mobile RobotsDocument6 paginiExperimental Comparison of Trajectory Tracking Algorithms For Nonholonomic Mobile RobotsdhineshpÎncă nu există evaluări
- Developtment and Operative Performance Analyses of The: Modular Rover Chassis Platform (MRCP)Document8 paginiDeveloptment and Operative Performance Analyses of The: Modular Rover Chassis Platform (MRCP)Karthik RaoÎncă nu există evaluări
- Low Cost Motion CaptureDocument5 paginiLow Cost Motion CaptureioscherzoÎncă nu există evaluări
- Multi-Rate Path Following ControlDocument6 paginiMulti-Rate Path Following ControlBinhMinh NguyenÎncă nu există evaluări
- LSPB Trajectory Planning Design For The ModularDocument4 paginiLSPB Trajectory Planning Design For The ModularbasantsahuÎncă nu există evaluări
- Jyotshana NewaDocument53 paginiJyotshana NewaInternship ReportÎncă nu există evaluări
- Maintenance Instructions For Voltage Detecting SystemDocument1 paginăMaintenance Instructions For Voltage Detecting Systemيوسف خضر النسورÎncă nu există evaluări
- Arduino Nano DHT11 Temperature and Humidity VisualDocument12 paginiArduino Nano DHT11 Temperature and Humidity Visualpower systemÎncă nu există evaluări
- Excel NotesDocument9 paginiExcel NotesAhnÎncă nu există evaluări
- 4150 70-37-3 Requirement AnalysisDocument71 pagini4150 70-37-3 Requirement AnalysisSreenath SreeÎncă nu există evaluări
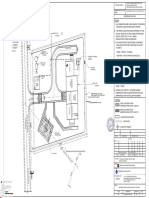
- PD2083-EL-HAZ-A1-004.pdf HAZARDOUS AREA CLASSIFICATION SV STATION-3Document1 paginăPD2083-EL-HAZ-A1-004.pdf HAZARDOUS AREA CLASSIFICATION SV STATION-3Alla Naveen KumarÎncă nu există evaluări
- MSMQ Service Failing To StartDocument2 paginiMSMQ Service Failing To Startann_scribdÎncă nu există evaluări
- LAB 7: Functions: Student Name: Nathaneal Anak Biat Student ID: EP01081100 Section:02ADocument9 paginiLAB 7: Functions: Student Name: Nathaneal Anak Biat Student ID: EP01081100 Section:02AWilfredÎncă nu există evaluări
- Cleartrip Flight Domestic E-TicketDocument3 paginiCleartrip Flight Domestic E-TicketSaurabh SinghÎncă nu există evaluări
- Supply Chain ManagementDocument16 paginiSupply Chain ManagementHaider AyyÎncă nu există evaluări
- Jun Jul 2021Document32 paginiJun Jul 2021Lai Kok UeiÎncă nu există evaluări
- Accounting and Finance: NTQF Level Ii-IvDocument143 paginiAccounting and Finance: NTQF Level Ii-Ivteshome neguse100% (3)
- Catamsia 9.0 Cara InstallDocument2 paginiCatamsia 9.0 Cara InstalljohnsonÎncă nu există evaluări
- Math 9 Q1 Summative Test 1Document4 paginiMath 9 Q1 Summative Test 1John Paul GaoatÎncă nu există evaluări
- Embase - Other - EmbaseScopusOverview Base de DatosDocument5 paginiEmbase - Other - EmbaseScopusOverview Base de DatosAditya GhoshÎncă nu există evaluări
- Guide Wire Installation: MaintenanceDocument26 paginiGuide Wire Installation: MaintenanceMichael HunterÎncă nu există evaluări
- Selling NDocument33 paginiSelling NADITYA VARPEÎncă nu există evaluări
- 2020 - Roadroid University Registration FormDocument2 pagini2020 - Roadroid University Registration FormAiidil SuwandiÎncă nu există evaluări
- SWFP66D Series Fine-Grinding Hammer Mill: Operation ManualDocument65 paginiSWFP66D Series Fine-Grinding Hammer Mill: Operation ManualDanielDeFrancescoÎncă nu există evaluări
- 7.2kV Current Transformer - WH3Document2 pagini7.2kV Current Transformer - WH3Sandhi YudiyantoÎncă nu există evaluări
- Submittal Patterson Bombs PDFDocument77 paginiSubmittal Patterson Bombs PDFFred GarciaÎncă nu există evaluări
- Synapsis Radar NX Operator Manual E05.01Document346 paginiSynapsis Radar NX Operator Manual E05.01russepilÎncă nu există evaluări
- Maico Brochure Eroscan en 02-23Document8 paginiMaico Brochure Eroscan en 02-23Carlos WagnerÎncă nu există evaluări
- En Iso 19036Document16 paginiEn Iso 19036Sharad JoshiÎncă nu există evaluări
- 9853 1213 01i Fluids and Lubricating GreasesDocument18 pagini9853 1213 01i Fluids and Lubricating GreasespressisoÎncă nu există evaluări
- Information Policy - AssignmentDocument2 paginiInformation Policy - Assignmentzira jerryÎncă nu există evaluări
- All Worksheets MYSQLDocument33 paginiAll Worksheets MYSQLSample1Încă nu există evaluări
- Facial RecognitionDocument5 paginiFacial RecognitionPeterÎncă nu există evaluări
- NAA Standard For The Storage of Archival RecordsDocument17 paginiNAA Standard For The Storage of Archival RecordsickoÎncă nu există evaluări
- STAT 344 SyllabusDocument7 paginiSTAT 344 SyllabusnoÎncă nu există evaluări
- Algorithms to Live By: The Computer Science of Human DecisionsDe la EverandAlgorithms to Live By: The Computer Science of Human DecisionsEvaluare: 4.5 din 5 stele4.5/5 (722)
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveDe la EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveÎncă nu există evaluări
- Defensive Cyber Mastery: Expert Strategies for Unbeatable Personal and Business SecurityDe la EverandDefensive Cyber Mastery: Expert Strategies for Unbeatable Personal and Business SecurityEvaluare: 5 din 5 stele5/5 (1)
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldDe la EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldEvaluare: 4.5 din 5 stele4.5/5 (55)
- The Infinite Machine: How an Army of Crypto-Hackers Is Building the Next Internet with EthereumDe la EverandThe Infinite Machine: How an Army of Crypto-Hackers Is Building the Next Internet with EthereumEvaluare: 3 din 5 stele3/5 (12)
- Cyber War: The Next Threat to National Security and What to Do About ItDe la EverandCyber War: The Next Threat to National Security and What to Do About ItEvaluare: 3.5 din 5 stele3.5/5 (66)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindDe la EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindÎncă nu există evaluări
- Digital Gold: Bitcoin and the Inside Story of the Misfits and Millionaires Trying to Reinvent MoneyDe la EverandDigital Gold: Bitcoin and the Inside Story of the Misfits and Millionaires Trying to Reinvent MoneyEvaluare: 4 din 5 stele4/5 (51)
- Chaos Monkeys: Obscene Fortune and Random Failure in Silicon ValleyDe la EverandChaos Monkeys: Obscene Fortune and Random Failure in Silicon ValleyEvaluare: 3.5 din 5 stele3.5/5 (111)
- Generative AI: The Insights You Need from Harvard Business ReviewDe la EverandGenerative AI: The Insights You Need from Harvard Business ReviewEvaluare: 4.5 din 5 stele4.5/5 (2)
- ChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessDe la EverandChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessÎncă nu există evaluări
- AI Superpowers: China, Silicon Valley, and the New World OrderDe la EverandAI Superpowers: China, Silicon Valley, and the New World OrderEvaluare: 4.5 din 5 stele4.5/5 (398)
- System Error: Where Big Tech Went Wrong and How We Can RebootDe la EverandSystem Error: Where Big Tech Went Wrong and How We Can RebootÎncă nu există evaluări
- Chip War: The Quest to Dominate the World's Most Critical TechnologyDe la EverandChip War: The Quest to Dominate the World's Most Critical TechnologyEvaluare: 4.5 din 5 stele4.5/5 (227)
- The Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyDe la EverandThe Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyÎncă nu există evaluări
- The Things We Make: The Unknown History of Invention from Cathedrals to Soda CansDe la EverandThe Things We Make: The Unknown History of Invention from Cathedrals to Soda CansÎncă nu există evaluări
- The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldDe la EverandThe Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldEvaluare: 4.5 din 5 stele4.5/5 (107)
- Mini Farming: Self-Sufficiency on 1/4 AcreDe la EverandMini Farming: Self-Sufficiency on 1/4 AcreEvaluare: 4 din 5 stele4/5 (76)
- The Simulated Multiverse: An MIT Computer Scientist Explores Parallel Universes, The Simulation Hypothesis, Quantum Computing and the Mandela EffectDe la EverandThe Simulated Multiverse: An MIT Computer Scientist Explores Parallel Universes, The Simulation Hypothesis, Quantum Computing and the Mandela EffectEvaluare: 4.5 din 5 stele4.5/5 (20)
- CompTIA Security+ Get Certified Get Ahead: SY0-701 Study GuideDe la EverandCompTIA Security+ Get Certified Get Ahead: SY0-701 Study GuideEvaluare: 5 din 5 stele5/5 (2)
- Reality+: Virtual Worlds and the Problems of PhilosophyDe la EverandReality+: Virtual Worlds and the Problems of PhilosophyEvaluare: 4 din 5 stele4/5 (24)