S-ar putea să vă placă și
- Outline of Lecture 9: Structural DynamicsDocument68 paginiOutline of Lecture 9: Structural DynamicslotushÎncă nu există evaluări
- VIBRATION MITIGATION TECHNIQUESDocument40 paginiVIBRATION MITIGATION TECHNIQUEShanumantharaya100% (1)
- Beams and Framed Structures: Structures and Solid Body MechanicsDe la EverandBeams and Framed Structures: Structures and Solid Body MechanicsEvaluare: 3 din 5 stele3/5 (2)
- Trabajo VibracionesDocument17 paginiTrabajo VibracionesCesar BautistaÎncă nu există evaluări
- Structural Dynamics Lecture 2 Single-Degree-of-Freedom SystemsDocument35 paginiStructural Dynamics Lecture 2 Single-Degree-of-Freedom SystemsLava SatÎncă nu există evaluări
- MDOF Systems and Natural FrequenciesDocument17 paginiMDOF Systems and Natural FrequenciesAshlin AarthiÎncă nu există evaluări
- Outline of Lecture 8: Structural DynamicsDocument49 paginiOutline of Lecture 8: Structural DynamicsAnish PaiÎncă nu există evaluări
- Dynamic Analysis of Beams by Using The Finite Element MethodDocument6 paginiDynamic Analysis of Beams by Using The Finite Element MethodAkshay BuraÎncă nu există evaluări
- Week 1 Vibration IntroductionDocument22 paginiWeek 1 Vibration IntroductionSaya SantornoÎncă nu există evaluări
- d1) 2DOF (Rev1)Document44 paginid1) 2DOF (Rev1)chocsoftwareÎncă nu există evaluări
- C10 To C12Document18 paginiC10 To C12Eduard Cosmin UngureanuÎncă nu există evaluări
- Single Degree of Freedom Systems Free Vibration GuideDocument76 paginiSingle Degree of Freedom Systems Free Vibration GuideDame AyaneÎncă nu există evaluări
- Theory of Vibration: Natural Frequencies and Damped SystemsDocument30 paginiTheory of Vibration: Natural Frequencies and Damped SystemsCharles OndiekiÎncă nu există evaluări
- Mechanical Vibrations Week 1Document57 paginiMechanical Vibrations Week 1mrb87Încă nu există evaluări
- Structural Dynamics 2Document9 paginiStructural Dynamics 2Anupam SonarÎncă nu există evaluări
- Discussion of The Improved Methods For Analyzing ADocument16 paginiDiscussion of The Improved Methods For Analyzing ASudheer Reddy TenaliÎncă nu există evaluări
- Direct Displacement MethodDocument5 paginiDirect Displacement MethodTewodros AbateÎncă nu există evaluări
- Vibrations of Multi-Degree of Freedom Systems: Simple Harmonic Motion That Passes Through Their Equilibrium PositionsDocument15 paginiVibrations of Multi-Degree of Freedom Systems: Simple Harmonic Motion That Passes Through Their Equilibrium PositionsMï XavierÎncă nu există evaluări
- Modal Analysis For Random Vibration of Hysteretic FramesDocument19 paginiModal Analysis For Random Vibration of Hysteretic Framesutsav_koshtiÎncă nu există evaluări
- Equations of MotionDocument6 paginiEquations of MotionDharshan KofiÎncă nu există evaluări
- Nonlinear Dynamics of Piecewise Linear OscillatorsDocument16 paginiNonlinear Dynamics of Piecewise Linear OscillatorsivyjeannÎncă nu există evaluări
- Knowledge Base: Education & T RainingDocument1 paginăKnowledge Base: Education & T RainingDeepak ChachraÎncă nu există evaluări
- Lecture 3Document150 paginiLecture 3Kedir ShiferawÎncă nu există evaluări
- ME2302 - FORCES AND EQUILIBRIUM IN MACHINERYDocument13 paginiME2302 - FORCES AND EQUILIBRIUM IN MACHINERYLogesh BabuÎncă nu există evaluări
- Project: Section 1: BackgroundDocument8 paginiProject: Section 1: BackgroundbaskarsinghÎncă nu există evaluări
- Chap 5Document28 paginiChap 5Mï XavierÎncă nu există evaluări
- Mixed multiple DOF systemsDocument13 paginiMixed multiple DOF systemspanos2244662864100% (1)
- Lecture 12Document27 paginiLecture 12yakwetuÎncă nu există evaluări
- UNIT 2 VibrationDocument9 paginiUNIT 2 VibrationAnonymous POUAc3zÎncă nu există evaluări
- MdofDocument67 paginiMdofAnupam SonarÎncă nu există evaluări
- Dynamic Magnification Factor For Impact LoadDocument7 paginiDynamic Magnification Factor For Impact LoadAbukalam MullaÎncă nu există evaluări
- DYNAMICS OF MACHINES NOTESDocument13 paginiDYNAMICS OF MACHINES NOTESJegan ParamasivamÎncă nu există evaluări
- Modelling multi-degree systemsDocument15 paginiModelling multi-degree systemsiJordanScribdÎncă nu există evaluări
- MTS-362 Mathematical Modeling of Mechanical Systems LectureDocument54 paginiMTS-362 Mathematical Modeling of Mechanical Systems Lectureusman_mani_7Încă nu există evaluări
- Author GuidelinesDocument14 paginiAuthor GuidelinesYAMINIPRIYANÎncă nu există evaluări
- Chapter 1-1 IntroductionDocument29 paginiChapter 1-1 Introductionالخليل إبراهيمÎncă nu există evaluări
- Chapter 4 - Dynamic AnalysisDocument16 paginiChapter 4 - Dynamic AnalysisDimple SharmaÎncă nu există evaluări
- Dynamic AnalysisDocument16 paginiDynamic AnalysisStella PinkÎncă nu există evaluări
- Chapter 4 - Dynamic AnalysisDocument16 paginiChapter 4 - Dynamic Analysislamour411100% (1)
- Chapter 4 - Dynamic AnalysisDocument16 paginiChapter 4 - Dynamic AnalysisDimple Sharma100% (1)
- 振動學題庫 2Document11 pagini振動學題庫 2San DugoÎncă nu există evaluări
- SCIA5202Document67 paginiSCIA52022BA19CV059 Rakshita SarangmathÎncă nu există evaluări
- Two Degree of Freedom Systems ExplainedDocument118 paginiTwo Degree of Freedom Systems ExplainedLeon OoÎncă nu există evaluări
- Junior Design Engineer Methods AnalysisDocument46 paginiJunior Design Engineer Methods Analysisyedida viswanadhÎncă nu există evaluări
- Lecture 1Document53 paginiLecture 1Muhammet TaskıranÎncă nu există evaluări
- Chatper 4 FEM Procedure and Spring Element PDFDocument9 paginiChatper 4 FEM Procedure and Spring Element PDFVijay SinghÎncă nu există evaluări
- Limitation Imposed On Structural DesignerDocument2 paginiLimitation Imposed On Structural DesignerdvarsastryÎncă nu există evaluări
- Principles of Dairy Machine DesignDocument153 paginiPrinciples of Dairy Machine Designurmila choudharyÎncă nu există evaluări
- Unit-1 One MarksDocument6 paginiUnit-1 One MarksShri RahulÎncă nu există evaluări
- Chapter 16Document85 paginiChapter 16arjunÎncă nu există evaluări
- MCT 456 Vibration Modeling FundamentalsDocument63 paginiMCT 456 Vibration Modeling FundamentalsReem GheithÎncă nu există evaluări
- Department of Mechanical Engineering Dynamics of MachineryDocument35 paginiDepartment of Mechanical Engineering Dynamics of Machinerypraveen ajithÎncă nu există evaluări
- Vibration analysis of a Duffing oscillatorDocument18 paginiVibration analysis of a Duffing oscillatorDaniyal AsifÎncă nu există evaluări
- Chapter4 MECE5104Document17 paginiChapter4 MECE5104CedricÎncă nu există evaluări
- Mechanical Vibration of Multiple Degrees of Freedom SystemsDocument5 paginiMechanical Vibration of Multiple Degrees of Freedom SystemsChristopher YsitÎncă nu există evaluări
- Dynamics Response Spectrum Analysis - Shear Plane FrameDocument35 paginiDynamics Response Spectrum Analysis - Shear Plane Frameamrsaleh999Încă nu există evaluări
- Chapter 18 Matrix Analysis of Beams and Frames by The Direct Stiffness MethodDocument38 paginiChapter 18 Matrix Analysis of Beams and Frames by The Direct Stiffness Methodavinash35100% (1)
- Spring Mass DamperDocument15 paginiSpring Mass DamperAeitesham Ul Huq SubedarÎncă nu există evaluări
- PRO100 Quick StartDocument19 paginiPRO100 Quick StartGhita PlicÎncă nu există evaluări
- Model Scrisoare de Recomandare Pentru Masterat Din Partea Angajatorului EnglezaDocument1 paginăModel Scrisoare de Recomandare Pentru Masterat Din Partea Angajatorului EnglezaBursuc Sergiu EmanuelÎncă nu există evaluări
- 03 Site Administation InstructionsDocument1 pagină03 Site Administation InstructionsBursuc Sergiu EmanuelÎncă nu există evaluări
- Evidenta de Betoane TurnateDocument1 paginăEvidenta de Betoane TurnateBursuc Sergiu EmanuelÎncă nu există evaluări
- TehnologyDocument29 paginiTehnologyBursuc Sergiu EmanuelÎncă nu există evaluări
- SB Certificate ICDocument1 paginăSB Certificate ICBursuc Sergiu EmanuelÎncă nu există evaluări
- Chet Holmes MM WorkbookDocument28 paginiChet Holmes MM Workbookflints100% (6)
- Pro100 ManualDocument61 paginiPro100 ManualMiha AnghelÎncă nu există evaluări
- Basicv 7Document29 paginiBasicv 7ashok kulkarniÎncă nu există evaluări
- Reliable Friend Reference for Iulian PatlagicaDocument1 paginăReliable Friend Reference for Iulian PatlagicaBursuc Sergiu EmanuelÎncă nu există evaluări
- Moving and Handling Theory: Sergiu BursucDocument1 paginăMoving and Handling Theory: Sergiu BursucBursuc Sergiu EmanuelÎncă nu există evaluări
- Test Exemplu Futures First ADocument2 paginiTest Exemplu Futures First ACornelius Paul AsoltaneiÎncă nu există evaluări
- Safeguard Vulnerable Adults TrainingDocument1 paginăSafeguard Vulnerable Adults TrainingBursuc Sergiu EmanuelÎncă nu există evaluări
- SB Certificate FADocument1 paginăSB Certificate FABursuc Sergiu EmanuelÎncă nu există evaluări
- Anexa 1 LaborDocument1 paginăAnexa 1 LaborBursuc Sergiu EmanuelÎncă nu există evaluări
- SF7138-00 Plan Cofraj Panouri 7138 - Plan Cofraj Panouri 7138 PDFDocument1 paginăSF7138-00 Plan Cofraj Panouri 7138 - Plan Cofraj Panouri 7138 PDFBursuc Sergiu EmanuelÎncă nu există evaluări
- 1PAG Asdasdasd Awlfjdlkj Alkjwejf Wdkfjwekjf Jwefijwfj Kjfwjef 'WJF WKG KLWJG' Owjfw JDocument1 pagină1PAG Asdasdasd Awlfjdlkj Alkjwejf Wdkfjwekjf Jwefijwfj Kjfwjef 'WJF WKG KLWJG' Owjfw JBursuc Sergiu EmanuelÎncă nu există evaluări
- Dan M Dan M Dan M: External WallDocument5 paginiDan M Dan M Dan M: External WallBursuc Sergiu EmanuelÎncă nu există evaluări
- May - 2013 MicromechanicsDocument44 paginiMay - 2013 MicromechanicsBursuc Sergiu EmanuelÎncă nu există evaluări
- PT DebugDocument530 paginiPT DebugBursuc Sergiu EmanuelÎncă nu există evaluări
- Test Exemplu Futures First ADocument2 paginiTest Exemplu Futures First ACornelius Paul AsoltaneiÎncă nu există evaluări
- Note 4 Engleza MQDocument5 paginiNote 4 Engleza MQBursuc Sergiu EmanuelÎncă nu există evaluări
- ReadmeDocument2 paginiReadmeBursuc Sergiu EmanuelÎncă nu există evaluări
- ReadmeDocument2 paginiReadmeBursuc Sergiu EmanuelÎncă nu există evaluări
- Civil constructions lecture covers infrastructure elementsDocument75 paginiCivil constructions lecture covers infrastructure elementsRadu TaşcăÎncă nu există evaluări
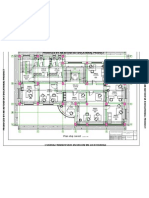
- Plan Etaj Curent-Layout1Document1 paginăPlan Etaj Curent-Layout1Bursuc Sergiu EmanuelÎncă nu există evaluări
- ExtrasDocument1 paginăExtrasBursuc Sergiu EmanuelÎncă nu există evaluări