S-ar putea să vă placă și
- RBIs Conservatism TriumphsDocument1 paginăRBIs Conservatism TriumphsVivekKumarÎncă nu există evaluări
- Industrial, Labour and General Laws (Module II Paper 7)Document0 paginiIndustrial, Labour and General Laws (Module II Paper 7)Jhha KKhushbuÎncă nu există evaluări
- Apfc SyllabusDocument1 paginăApfc SyllabusgreggtldivisionÎncă nu există evaluări
- Retriggerable Monostable Multivibrators Pulse Width Control GuideDocument8 paginiRetriggerable Monostable Multivibrators Pulse Width Control GuidePandarinath ParachiÎncă nu există evaluări
- Hawk Eye TechnologyDocument39 paginiHawk Eye TechnologyPandarinath ParachiÎncă nu există evaluări
- 3D Ic'sDocument18 pagini3D Ic'sSaikrishna NerellaÎncă nu există evaluări
- Basic Geometiric Formulas and PropertiesDocument5 paginiBasic Geometiric Formulas and PropertiesRayden TanÎncă nu există evaluări
- Stealth TechnologyDocument12 paginiStealth TechnologykkkrajaÎncă nu există evaluări
- Coldren - Tunable Semiconductor LasersDocument32 paginiColdren - Tunable Semiconductor LasersPandarinath ParachiÎncă nu există evaluări
- LNM 1Document42 paginiLNM 1KANHIYA78100% (1)
- Coldren - Tunable Semiconductor LasersDocument32 paginiColdren - Tunable Semiconductor LasersPandarinath ParachiÎncă nu există evaluări
- Analog To Digital ConvertersDocument39 paginiAnalog To Digital ConvertersPandarinath ParachiÎncă nu există evaluări
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (894)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
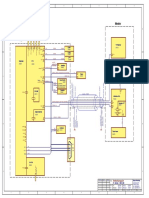
- Sigma-Amelung Trintity PC AMAX200 - Circuit DiagramDocument5 paginiSigma-Amelung Trintity PC AMAX200 - Circuit DiagramSoporte CicomerxÎncă nu există evaluări
- Bio BatteryDocument11 paginiBio BatteryGurubasamma LÎncă nu există evaluări
- Watts User Guide TD Central Unit Wifi 2019 09 Ttl2Document240 paginiWatts User Guide TD Central Unit Wifi 2019 09 Ttl2Francesco PansaÎncă nu există evaluări
- Raindropz Remix - YouTubeDocument3 paginiRaindropz Remix - YouTubeGary DiazÎncă nu există evaluări
- Introduction of The ILS, VOR, DMEDocument43 paginiIntroduction of The ILS, VOR, DMEChiranjivi Kuthumi100% (1)
- Car Speed Detector (1) (Read-Only) 4 (1) (Read-Only) 5 (1) (Read-Only) 6Document16 paginiCar Speed Detector (1) (Read-Only) 4 (1) (Read-Only) 5 (1) (Read-Only) 6Shadab AnsariÎncă nu există evaluări
- Synchronous Servo Motor For Screw Drives (Direct Drive For Threaded Nut)Document20 paginiSynchronous Servo Motor For Screw Drives (Direct Drive For Threaded Nut)markokocÎncă nu există evaluări
- Holmarc Lab EquipmentsDocument24 paginiHolmarc Lab EquipmentsatswallaÎncă nu există evaluări
- RoboBASIC English Command Instruction Manual (Version 2.10 20051118)Document149 paginiRoboBASIC English Command Instruction Manual (Version 2.10 20051118)Pham Hoang Minh100% (2)
- GX Apendice CDocument4 paginiGX Apendice CDaniel NogueiraÎncă nu există evaluări
- Production Sound Essentials PDFDocument6 paginiProduction Sound Essentials PDFAlex HavranÎncă nu există evaluări
- Tax Invoice for Nokia 5.1 Plus MobileDocument1 paginăTax Invoice for Nokia 5.1 Plus Mobilepunithrgowda22Încă nu există evaluări
- Automatic aeroponic irrigation system based on ArduinoDocument13 paginiAutomatic aeroponic irrigation system based on ArduinoDheeraj ThakurÎncă nu există evaluări
- Accident Recognition Through Crash Detection and Alerting System Using GSMDocument17 paginiAccident Recognition Through Crash Detection and Alerting System Using GSMsaprakash1712Încă nu există evaluări
- Experiment 3 (B) : Basics of OR Gate and Its Application in Industrial ControlDocument3 paginiExperiment 3 (B) : Basics of OR Gate and Its Application in Industrial ControlDivyanshu BoseÎncă nu există evaluări
- Single Output Thermostat or Humidistat Single Output Thermostat or HumidistatDocument1 paginăSingle Output Thermostat or Humidistat Single Output Thermostat or HumidistatCarlos MaicanÎncă nu există evaluări
- Automatic Water Pump Controller Project ReportDocument44 paginiAutomatic Water Pump Controller Project ReportNitin Verma100% (1)
- Evaluating JFET Transistors for Linear Performance in Active Antenna DesignsDocument9 paginiEvaluating JFET Transistors for Linear Performance in Active Antenna DesignsAlex SanÎncă nu există evaluări
- ELECTRONIC ENGINEERING LTD. Outdoor PIR ManualDocument18 paginiELECTRONIC ENGINEERING LTD. Outdoor PIR Manualtadeo.hdzÎncă nu există evaluări
- Zc300 Specification SheetDocument4 paginiZc300 Specification Sheetgroovey9040Încă nu există evaluări
- HP Journal 1975-03Document24 paginiHP Journal 1975-03dwisselÎncă nu există evaluări
- Final Report: Voice Controlled Home Automation Using Arduino and Bluetooth ModuleDocument18 paginiFinal Report: Voice Controlled Home Automation Using Arduino and Bluetooth ModuleSumanthsaiÎncă nu există evaluări
- NUS ME Core Modules 20190925 PDFDocument3 paginiNUS ME Core Modules 20190925 PDFHammadAzizÎncă nu există evaluări
- Model G PressDocument2 paginiModel G Pressbeach_lover_1970Încă nu există evaluări
- Secop Compressors CatalogueDocument180 paginiSecop Compressors CatalogueBraian Cabañas Visca BarçaÎncă nu există evaluări
- SiGe RF Front-End PerformanceDocument6 paginiSiGe RF Front-End PerformancekimvirusÎncă nu există evaluări
- Operating Systems From 0 To 1 PDFDocument311 paginiOperating Systems From 0 To 1 PDF3charlie52Încă nu există evaluări
- Fusealloy Fabrication Guidelines 2016Document25 paginiFusealloy Fabrication Guidelines 2016Vitor Rigueira de GodoyÎncă nu există evaluări
- An Example of A Flexible DisplayDocument5 paginiAn Example of A Flexible DisplayKick ChanduÎncă nu există evaluări
- BCM Ford FocusDocument86 paginiBCM Ford FocusRomeo Belko50% (2)