S-ar putea să vă placă și
- Arkon USCX150 User GuideDocument54 paginiArkon USCX150 User GuideGanesh Kumar ArumugamÎncă nu există evaluări
- Excitation System - MarunII-Thyricon Operation Manual FullDocument61 paginiExcitation System - MarunII-Thyricon Operation Manual FullGanesh Kumar ArumugamÎncă nu există evaluări
- Product Data Sheet: Auxiliary Contact, Acti9, iOF, 1 OC, AC/DCDocument2 paginiProduct Data Sheet: Auxiliary Contact, Acti9, iOF, 1 OC, AC/DCGanesh Kumar ArumugamÎncă nu există evaluări
- Microcomputer modulator-PTA303Document6 paginiMicrocomputer modulator-PTA303Ganesh Kumar ArumugamÎncă nu există evaluări
- LCU Power Transducer FPWK-201Document2 paginiLCU Power Transducer FPWK-201Ganesh Kumar ArumugamÎncă nu există evaluări
- PPT-x80 Eagle User ManualDocument23 paginiPPT-x80 Eagle User ManualGanesh Kumar ArumugamÎncă nu există evaluări
- PMx-300 Rhino User ManualDocument125 paginiPMx-300 Rhino User ManualGanesh Kumar ArumugamÎncă nu există evaluări
- Influnce PeopleDocument6 paginiInflunce PeopleGanesh Kumar ArumugamÎncă nu există evaluări
- Operated and Maintenance Manual B Series...Document286 paginiOperated and Maintenance Manual B Series...Ganesh Kumar Arumugam100% (2)
- LVS User ManualDocument17 paginiLVS User ManualGanesh Kumar ArumugamÎncă nu există evaluări
- Cable Fault Recognition Using Multiple Wavelet Neural NetworksDocument6 paginiCable Fault Recognition Using Multiple Wavelet Neural NetworksGanesh Kumar ArumugamÎncă nu există evaluări
- PMS-300 Rhino Hardware ManualDocument39 paginiPMS-300 Rhino Hardware ManualGanesh Kumar ArumugamÎncă nu există evaluări
- Brushless DC Motors Are A Type of Synchronous MotorDocument16 paginiBrushless DC Motors Are A Type of Synchronous MotorGanesh Kumar ArumugamÎncă nu există evaluări
- Artificial Neural Networks - Lab 5 Self-Organising Feature Maps and Hopfield NetworksDocument4 paginiArtificial Neural Networks - Lab 5 Self-Organising Feature Maps and Hopfield NetworksGanesh Kumar ArumugamÎncă nu există evaluări
- Ejsr 49 3 15Document16 paginiEjsr 49 3 15Ganesh Kumar ArumugamÎncă nu există evaluări
- Fuzzy Based Fault Detection and Diagnosis in Pneumatic Actuator in Cement IndustryDocument13 paginiFuzzy Based Fault Detection and Diagnosis in Pneumatic Actuator in Cement IndustryGanesh Kumar ArumugamÎncă nu există evaluări
- Online Monitoring and Intelligent Diagnosis System Based On Hybrid Wireless Network For Large Complicated EquipmentDocument5 paginiOnline Monitoring and Intelligent Diagnosis System Based On Hybrid Wireless Network For Large Complicated EquipmentGanesh Kumar ArumugamÎncă nu există evaluări
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5795)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
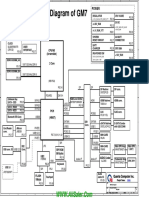
- Dell XPS 17 Quanta GM7 Rev D SchematicsDocument39 paginiDell XPS 17 Quanta GM7 Rev D SchematicsvcompumatikÎncă nu există evaluări
- Flue Gas Analysis in IndustryDocument150 paginiFlue Gas Analysis in Industryblack_knight728Încă nu există evaluări
- Shackle Marking InformationDocument7 paginiShackle Marking Informationmalborn100% (1)
- Chapter 2 Maternal Anatomy WilliamsDocument60 paginiChapter 2 Maternal Anatomy WilliamsDiskaAstariniÎncă nu există evaluări
- TB-2100 Operational and Maintenance Manual Rev C OptimiseDocument224 paginiTB-2100 Operational and Maintenance Manual Rev C OptimisearnaudmarielÎncă nu există evaluări
- Infinix NOTE 5 Stylus Quick Guide: Together We Can!Document16 paginiInfinix NOTE 5 Stylus Quick Guide: Together We Can!LescribeurÎncă nu există evaluări
- New Model For Predicting Thermal Radiation From Flares and High Pressure Jet Fires For Hydrogen and SyngasDocument15 paginiNew Model For Predicting Thermal Radiation From Flares and High Pressure Jet Fires For Hydrogen and Syngasthlim19078656Încă nu există evaluări
- 4.uses of Metals - 1-32 For StudentsDocument13 pagini4.uses of Metals - 1-32 For StudentsnergisalihpasaogluÎncă nu există evaluări
- Codigo Ficheros PHPDocument33 paginiCodigo Ficheros PHPm_montielÎncă nu există evaluări
- Part 1Document120 paginiPart 1Raju Halder0% (1)
- 5510 0004 04 - 18 1021 Basic Principles of Ship Propulsion - MAN PDFDocument68 pagini5510 0004 04 - 18 1021 Basic Principles of Ship Propulsion - MAN PDFAlex FatecÎncă nu există evaluări
- An Isogeometric Analysis Approach For The Study of Structural VibrationsDocument59 paginiAn Isogeometric Analysis Approach For The Study of Structural VibrationsBharti SinghÎncă nu există evaluări
- Modding ManualDocument25 paginiModding ManualSebastian SallerÎncă nu există evaluări
- Traulsen RLT - ALT Freezer DUTDocument2 paginiTraulsen RLT - ALT Freezer DUTwsfc-ebayÎncă nu există evaluări
- Abhilash Betanamudi: AchievementsDocument3 paginiAbhilash Betanamudi: AchievementsAbhilashBetanamudiÎncă nu există evaluări
- Microsoft OfficeDocument1 paginăMicrosoft OfficesavinaumarÎncă nu există evaluări
- Computer Networks: Introduction (Chapter 1)Document92 paginiComputer Networks: Introduction (Chapter 1)Speed PianoÎncă nu există evaluări
- E-Studio 205L, 255, 305, 355, 455 MFP Service HandbookDocument732 paginiE-Studio 205L, 255, 305, 355, 455 MFP Service HandbookAnonymous gn8qxx66% (35)
- Vogue 201602 Japan PDFDocument254 paginiVogue 201602 Japan PDFJack Douglas YooÎncă nu există evaluări
- Arthashastra: Citation NeededDocument4 paginiArthashastra: Citation NeededtusharÎncă nu există evaluări
- 04 Extended Graphics DesignDocument34 pagini04 Extended Graphics DesignEngenheiro AmoedoÎncă nu există evaluări
- System Administration JakartaDocument347 paginiSystem Administration JakartaLorena Castillero80% (10)
- DTC P1200 Fuel Pump Relay/ECU Circuit MalfunctionDocument4 paginiDTC P1200 Fuel Pump Relay/ECU Circuit MalfunctiononealÎncă nu există evaluări
- XML SerializationDocument4 paginiXML Serializationapi-3748960Încă nu există evaluări
- Section 3 Quiz, Database Design ORACLEDocument8 paginiSection 3 Quiz, Database Design ORACLEMostragÎncă nu există evaluări
- Standard Test Method For Density and Void Content of Freshly Mixed Pervious ConcreteDocument4 paginiStandard Test Method For Density and Void Content of Freshly Mixed Pervious ConcreteManaswini VadlamaniÎncă nu există evaluări
- 23-Article Text-89-3-10-20200704Document16 pagini23-Article Text-89-3-10-20200704cholifah agumÎncă nu există evaluări
- Water Cooled Chiller Operation & Maintenance ManualDocument13 paginiWater Cooled Chiller Operation & Maintenance ManualPaul KwongÎncă nu există evaluări
- Astm A106-2002Document13 paginiAstm A106-2002henryÎncă nu există evaluări
- The Role of Virtual Reality Simulation in Surgical Training in The Light of COVID-19 PandemicDocument13 paginiThe Role of Virtual Reality Simulation in Surgical Training in The Light of COVID-19 PandemicIván Hernández FloresÎncă nu există evaluări