S-ar putea să vă placă și
- ST1504 063Document6 paginiST1504 063Costel CostescuÎncă nu există evaluări
- Transducer Manual NewDocument17 paginiTransducer Manual NewSARDAR PATELÎncă nu există evaluări
- Mte 1102Document22 paginiMte 1102Sourav RoyÎncă nu există evaluări
- ELECTRIC COMPARATORS: PRINCIPLES - Linear Variable Differential Transformer (LVDT) Electrical ComparatorsDocument2 paginiELECTRIC COMPARATORS: PRINCIPLES - Linear Variable Differential Transformer (LVDT) Electrical ComparatorsvaibhavmnÎncă nu există evaluări
- An LVDT-based Self-Actuating Displacement TransducerDocument7 paginiAn LVDT-based Self-Actuating Displacement TransducerGeorge PetersÎncă nu există evaluări
- Current/Voltage Measurement Scheme Using A Flexible Coil/Electrode Power Sensor To Monitor The Power of Two-Wired Household AppliancesDocument11 paginiCurrent/Voltage Measurement Scheme Using A Flexible Coil/Electrode Power Sensor To Monitor The Power of Two-Wired Household AppliancesInternational Journal of Application or Innovation in Engineering & ManagementÎncă nu există evaluări
- Expt 15Document10 paginiExpt 15rameshamruthaluriÎncă nu există evaluări
- Eddy Probe System On The Basis of New Technology: FT L C L I T UDocument6 paginiEddy Probe System On The Basis of New Technology: FT L C L I T UNatthaphon NaosookÎncă nu există evaluări
- Measurements and Simulations of The Ionic Wind Produced by A DC Corona Discharge Between Cylindrical WiresDocument4 paginiMeasurements and Simulations of The Ionic Wind Produced by A DC Corona Discharge Between Cylindrical WiresRidda AfzalÎncă nu există evaluări
- Be8253 - Unit 5Document23 paginiBe8253 - Unit 5balajiÎncă nu există evaluări
- 3.3introduction To CRO - Cathode Ray Oscilloscope: Block DiagramDocument12 pagini3.3introduction To CRO - Cathode Ray Oscilloscope: Block DiagramAddisu Safo BoseraÎncă nu există evaluări
- Magnetic Forces and Moving Body Induced Voltages: Applications To Velocity Sensing and DC-AC ConversionDocument7 paginiMagnetic Forces and Moving Body Induced Voltages: Applications To Velocity Sensing and DC-AC ConversionAryce_Încă nu există evaluări
- Senzori Miscare EnglDocument16 paginiSenzori Miscare EnglCristian GodeanuÎncă nu există evaluări
- Offset-Free Bidirectional Current Source For Impedance MeasurementDocument4 paginiOffset-Free Bidirectional Current Source For Impedance MeasurementHerman ToothrotÎncă nu există evaluări
- Rogowski Coil Transient Performance and Atp Simulation For Aplications in Protective RelaysDocument6 paginiRogowski Coil Transient Performance and Atp Simulation For Aplications in Protective RelaysJose Alberto RodriguezÎncă nu există evaluări
- NFT-011-O DaoNgocChien Fullpaper IWNA2011 PDFDocument4 paginiNFT-011-O DaoNgocChien Fullpaper IWNA2011 PDFNgocHieuQuangÎncă nu există evaluări
- 116 Paper S Nihtianov1Document7 pagini116 Paper S Nihtianov1JoepÎncă nu există evaluări
- A 0.14 THZ Relativistic Coaxial Overmoded Surface Wave Oscillator With Metamaterial Slow Wave StructureDocument6 paginiA 0.14 THZ Relativistic Coaxial Overmoded Surface Wave Oscillator With Metamaterial Slow Wave StructureHOD PhysicsÎncă nu există evaluări
- LVDTDocument8 paginiLVDTAnirban GhoshÎncă nu există evaluări
- EXP7Document12 paginiEXP7Hero CourseÎncă nu există evaluări
- Materials 07 01850 v2 PDFDocument16 paginiMaterials 07 01850 v2 PDFMihai TataroiÎncă nu există evaluări
- Sensors and MeasurementsDocument19 paginiSensors and MeasurementsADAM HISSEN AHMATÎncă nu există evaluări
- A Detailed Explanation of Solenoid ForceDocument8 paginiA Detailed Explanation of Solenoid ForceidescitationÎncă nu există evaluări
- Study of Wireless Power Transfer by Induction Technique: Amit Kumar, Shubhajit Jana, Reshmi ChandraDocument6 paginiStudy of Wireless Power Transfer by Induction Technique: Amit Kumar, Shubhajit Jana, Reshmi ChandraIOSRjournalÎncă nu există evaluări
- Biegel B Wigner Function Simulation of Intrinsic Oscillations Hysteresis and Bistability in Resonant Tunneling StructuresDocument11 paginiBiegel B Wigner Function Simulation of Intrinsic Oscillations Hysteresis and Bistability in Resonant Tunneling StructuresAzhar MahmoodÎncă nu există evaluări
- Linear Displacement MeasurementDocument7 paginiLinear Displacement Measurementஹரி கிருஷ்ணன் வாசுÎncă nu există evaluări
- FE-Modelling of Induction Tool Responses: F Iii: GDocument4 paginiFE-Modelling of Induction Tool Responses: F Iii: GtomhowÎncă nu există evaluări
- Universal Currnet SensorDocument15 paginiUniversal Currnet SensorJohnny Rider100% (1)
- 3D Sensitivity of 6-Electrode FIM Through Experimental Study in A PhantomDocument5 pagini3D Sensitivity of 6-Electrode FIM Through Experimental Study in A PhantomInnovative Research PublicationsÎncă nu există evaluări
- ST Unit 4 NotesDocument25 paginiST Unit 4 Notesabc fun facts100% (1)
- By: Gebremariam Fisseha Adigrat University, Ethiopia 2010E.CDocument17 paginiBy: Gebremariam Fisseha Adigrat University, Ethiopia 2010E.CYosef KirosÎncă nu există evaluări
- Electrical Resistance Tomography With Voltage Excitation: Conference PaperDocument7 paginiElectrical Resistance Tomography With Voltage Excitation: Conference PaperPrantik DasÎncă nu există evaluări
- Chapter Two: Sensors and ApplicationDocument10 paginiChapter Two: Sensors and ApplicationAddisu Safo BoseraÎncă nu există evaluări
- Unit-III (Topic - 3)Document61 paginiUnit-III (Topic - 3)vsresika20Încă nu există evaluări
- Optical Voltage Transducer For Embedded Medium Voltage Equipment: Design and Parameters OptimizationDocument4 paginiOptical Voltage Transducer For Embedded Medium Voltage Equipment: Design and Parameters Optimizationmafia criminalÎncă nu există evaluări
- Important Concepts in High Frequency Electromagnetics: Edl HDLDocument72 paginiImportant Concepts in High Frequency Electromagnetics: Edl HDLRajen Kumar PatraÎncă nu există evaluări
- Moct Seminar ReportDocument20 paginiMoct Seminar ReportGaurav Soni25% (4)
- Design and Development of A Fluxgate MagnetometerDocument5 paginiDesign and Development of A Fluxgate Magnetometerdr_oxide2Încă nu există evaluări
- Eddy PiezoDocument19 paginiEddy Piezoshrish ukhalkarÎncă nu există evaluări
- Efficient Wireless Power Transfer - Resonance Does Not Imply High EfficiencyDocument4 paginiEfficient Wireless Power Transfer - Resonance Does Not Imply High EfficiencyMihai PopaÎncă nu există evaluări
- Optical Current TransformerDocument22 paginiOptical Current TransformerchallaramcharanreddyÎncă nu există evaluări
- The Optimization of Dual-Core Closed-Loop Fluxgate Technology in Precision Current SensorDocument4 paginiThe Optimization of Dual-Core Closed-Loop Fluxgate Technology in Precision Current SensorSyed Mohammad Rehan AliÎncă nu există evaluări
- Ajaayayay 4654564646Document73 paginiAjaayayay 4654564646XtremeInfosoftAlwarÎncă nu există evaluări
- Witricity Seminar ReportDocument8 paginiWitricity Seminar ReportMohammed MusifÎncă nu există evaluări
- 2 Introduction To Microwave Circuits and Transmission Line TheoryDocument15 pagini2 Introduction To Microwave Circuits and Transmission Line TheoryYohannes NakachewÎncă nu există evaluări
- Lect 16Document10 paginiLect 16Mohamed ShabanaÎncă nu există evaluări
- Eea 61 1 2013 014 EN LP 000Document5 paginiEea 61 1 2013 014 EN LP 000kubikÎncă nu există evaluări
- Measuring Position and Displacement With LVDTS: TutorialDocument5 paginiMeasuring Position and Displacement With LVDTS: TutorialpeterhassanÎncă nu există evaluări
- Memristor DocumentationDocument33 paginiMemristor Documentationsyviswanath100% (8)
- BBEE203 Module 5 StudentsDocument35 paginiBBEE203 Module 5 StudentsshilpaÎncă nu există evaluări
- Design of Ultra Fast 2x2 Electro-Optic Polymer Waveguide Switch For Protection in Intelligent Optical NetworksDocument8 paginiDesign of Ultra Fast 2x2 Electro-Optic Polymer Waveguide Switch For Protection in Intelligent Optical NetworksPonmalar SivarajÎncă nu există evaluări
- Unit 2piezoelectrictransducerDocument6 paginiUnit 2piezoelectrictransducersvnet vizagÎncă nu există evaluări
- Inductive TransducersDocument29 paginiInductive TransducersAnsh MidhaÎncă nu există evaluări
- TCT Instructions ForTheExcerciseDocument6 paginiTCT Instructions ForTheExcerciseDeshitha Chamikara WickramarathnaÎncă nu există evaluări
- Lab Experiment # 1: Familiarization With Modern Electronics Lab TrainerDocument5 paginiLab Experiment # 1: Familiarization With Modern Electronics Lab TrainerSaad khan100% (1)
- P10 MetalDet G4 FinalReportDocument15 paginiP10 MetalDet G4 FinalReportherrberk100% (1)
- Employee Master DataDocument2.280 paginiEmployee Master DataamitpandaÎncă nu există evaluări
- Notification-Faculty Recruitment-Rolling AdvtDocument1 paginăNotification-Faculty Recruitment-Rolling AdvtamitpandaÎncă nu există evaluări
- Rolling Advertisement For Faculty Recruitment: Òkjrkh Lkwpukk Izks - FXDH) Vfòdyiuk, Oa Fofuekz.K Lalfkku) DkaphiqjeDocument13 paginiRolling Advertisement For Faculty Recruitment: Òkjrkh Lkwpukk Izks - FXDH) Vfòdyiuk, Oa Fofuekz.K Lalfkku) DkaphiqjeamitpandaÎncă nu există evaluări
- Table 2 Field Subfield Thresholds Singleyr 2020 Wopp Extracted 202108Document29 paginiTable 2 Field Subfield Thresholds Singleyr 2020 Wopp Extracted 202108amitpandaÎncă nu există evaluări
- Array Multiplier: 4x4 Bit Binary MultiplicationDocument1 paginăArray Multiplier: 4x4 Bit Binary MultiplicationamitpandaÎncă nu există evaluări
- Parallel Prefix Networks That Make Tradeoffs Between Logic Levels, Fanout and Wiring RacksDocument15 paginiParallel Prefix Networks That Make Tradeoffs Between Logic Levels, Fanout and Wiring RacksamitpandaÎncă nu există evaluări
- Affine CipherDocument3 paginiAffine CipheramitpandaÎncă nu există evaluări
- Examination 2 - CPLD, VHDL & Combinational LogicDocument9 paginiExamination 2 - CPLD, VHDL & Combinational LogicamitpandaÎncă nu există evaluări
- Temperature Transmitter TR45Document16 paginiTemperature Transmitter TR45cysautsÎncă nu există evaluări
- Math 9 Textbook AnswersDocument43 paginiMath 9 Textbook AnswersMehak GillÎncă nu există evaluări
- Cost Center Budget Availability Control - S - 4 HANA 1909Document24 paginiCost Center Budget Availability Control - S - 4 HANA 1909sekhar dattaÎncă nu există evaluări
- Studi Dampak Lalu Lintas Pembangunan Gudang Dan Kantor Pt. Wismilak Group Di Jalan Raya Solo SragenDocument8 paginiStudi Dampak Lalu Lintas Pembangunan Gudang Dan Kantor Pt. Wismilak Group Di Jalan Raya Solo SragenIlung MarpaungÎncă nu există evaluări
- Overview of Missile Flight Control Systems: Paul B. JacksonDocument16 paginiOverview of Missile Flight Control Systems: Paul B. JacksonrobjohniiiÎncă nu există evaluări
- Electronic Modular Control Panel II Paralleling Emcp II P Systems Operation Troubleshooting Testing and Adjusting CaterpillarDocument200 paginiElectronic Modular Control Panel II Paralleling Emcp II P Systems Operation Troubleshooting Testing and Adjusting CaterpillarAbdo MalkiÎncă nu există evaluări
- Regression Analysis AssignmentDocument8 paginiRegression Analysis Assignmentضیاء گل مروت100% (1)
- Unit Iv Ce 6405Document13 paginiUnit Iv Ce 6405HanafiahHamzahÎncă nu există evaluări
- Packet Life BookDocument28 paginiPacket Life BookboucheravÎncă nu există evaluări
- Squall (Better) Training Manual: ModelsDocument83 paginiSquall (Better) Training Manual: ModelsSilomo-saka MambaÎncă nu există evaluări
- Import Data From Excel To Sap TableDocument11 paginiImport Data From Excel To Sap TableSajjadÎncă nu există evaluări
- PRACTICAL RESEARCH 2 - Q1 - W1 - Mod1Document13 paginiPRACTICAL RESEARCH 2 - Q1 - W1 - Mod1Ma Fe Evangelista Galia77% (48)
- Effect of Moisture Absorption On The Properties of Natural FiberDocument6 paginiEffect of Moisture Absorption On The Properties of Natural FiberIsmadi IsmadiÎncă nu există evaluări
- BIBLIOMETRICDocument30 paginiBIBLIOMETRICkalaranishanmuganathÎncă nu există evaluări
- GENERAL PHYSICS 2 - Q3 - Week 2Document22 paginiGENERAL PHYSICS 2 - Q3 - Week 2vrejie46Încă nu există evaluări
- 7 Market EquilibriumDocument4 pagini7 Market EquilibriumAdeeba iqbalÎncă nu există evaluări
- Efectele Pe Termen Lung Ale Alaptatului OMSDocument74 paginiEfectele Pe Termen Lung Ale Alaptatului OMSbobocraiÎncă nu există evaluări
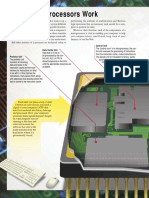
- How Microprocessors Work PDFDocument2 paginiHow Microprocessors Work PDFdanielconstantin4Încă nu există evaluări
- Unit 2 MCB Key PDFDocument19 paginiUnit 2 MCB Key PDFDafne Fertig88% (32)
- V-Ray For SketchUp Rendering An Exterior Scene PDFDocument7 paginiV-Ray For SketchUp Rendering An Exterior Scene PDFDevohÎncă nu există evaluări
- AMC Measurement ProblemsDocument2 paginiAMC Measurement ProblemseltoÎncă nu există evaluări
- Valve & Amplifier Design, Valve EquivalentsDocument51 paginiValve & Amplifier Design, Valve EquivalentsValve Data80% (5)
- IC Project Report Dashboard 10673 0Document6 paginiIC Project Report Dashboard 10673 0Anonymous Sls6WCF100% (2)
- AKA5510EXADocument2 paginiAKA5510EXAСтоил СемерджиевÎncă nu există evaluări
- 04931V - 396 ToolingDocument52 pagini04931V - 396 Toolingpiston brokeÎncă nu există evaluări
- ISG Services OverviewDocument12 paginiISG Services OverviewsdonÎncă nu există evaluări
- Reducing The Efficiency Gap by Optimal Allocation Using Modified Assignment Problem For Apparel Industry in Sri LankaDocument1 paginăReducing The Efficiency Gap by Optimal Allocation Using Modified Assignment Problem For Apparel Industry in Sri LankaShivam BhandariÎncă nu există evaluări
- Traulsen RLT - ALT Freezer DUTDocument2 paginiTraulsen RLT - ALT Freezer DUTwsfc-ebayÎncă nu există evaluări
- Compre Queation PaperDocument6 paginiCompre Queation PaperGanesh DharmireddyÎncă nu există evaluări
- 4.uses of Metals - 1-32 For StudentsDocument13 pagini4.uses of Metals - 1-32 For StudentsnergisalihpasaogluÎncă nu există evaluări