S-ar putea să vă placă și
- Agilent ADNS-2051 Optical Mouse Sensor: Data SheetDocument40 paginiAgilent ADNS-2051 Optical Mouse Sensor: Data Sheetthongle100% (1)
- Mouse SensorDocument27 paginiMouse SensorHimanshu Choudhary100% (1)
- ADNS 2030 AvagoDocument34 paginiADNS 2030 AvagoHemanth BollamreddiÎncă nu există evaluări
- Avago ADNS-9800 DatasheetDocument40 paginiAvago ADNS-9800 DatasheetRobert PetersonÎncă nu există evaluări
- Optical Mouse SensorDocument27 paginiOptical Mouse SensorDDGNJRC100% (1)
- Adns 3050Document30 paginiAdns 3050Sohnny JinsÎncă nu există evaluări
- Agilent ADNS-3080 High-Performance Optical Mouse Sensor: Data SheetDocument41 paginiAgilent ADNS-3080 High-Performance Optical Mouse Sensor: Data Sheetjakalae5263Încă nu există evaluări
- Design Guide: ADNK-5003Document8 paginiDesign Guide: ADNK-5003Byron ZúñigaÎncă nu există evaluări
- 6-Line EMI Filter&ESD For SD Card UQFN16Document12 pagini6-Line EMI Filter&ESD For SD Card UQFN16conti51Încă nu există evaluări
- QRD1114Document4 paginiQRD1114GeovasCasteloÎncă nu există evaluări
- Esp32-Solo-1 Datasheet enDocument26 paginiEsp32-Solo-1 Datasheet enSütő László BalázsÎncă nu există evaluări
- Solid-State Optical Mouse Sensor With PS/2 and Quadrature OutputsDocument11 paginiSolid-State Optical Mouse Sensor With PS/2 and Quadrature Outputsloco colinaÎncă nu există evaluări
- Service Manual: Model #: SV320XVT/370XVT - LGDDocument32 paginiService Manual: Model #: SV320XVT/370XVT - LGDDustin LaRocheÎncă nu există evaluări
- QRD 1114Document4 paginiQRD 1114Beca StarkÎncă nu există evaluări
- NIKON - D200 Repair ManualDocument109 paginiNIKON - D200 Repair Manualianjpr50% (2)
- KVH E-Core 1000Document21 paginiKVH E-Core 1000derbagÎncă nu există evaluări
- Data Sheet: AFBR-5803AQZ and AFBR-5803ATQZDocument16 paginiData Sheet: AFBR-5803AQZ and AFBR-5803ATQZjonwangÎncă nu există evaluări
- Optical Reflective Sensors: HEDS-1200 High Resolution Infrared Sensor HEDS-1300 Precision Resolution SensorDocument8 paginiOptical Reflective Sensors: HEDS-1200 High Resolution Infrared Sensor HEDS-1300 Precision Resolution Sensorh_mengesÎncă nu există evaluări
- Erc12864fs 1 ManualDocument10 paginiErc12864fs 1 ManualHélderÎncă nu există evaluări
- VCNL4000: Vishay SemiconductorsDocument14 paginiVCNL4000: Vishay SemiconductorsDeepak ChandrasekarÎncă nu există evaluări
- 42" Plasma PDP Monitor Chassis: Sp-120: MODEL: PDS4250Document62 pagini42" Plasma PDP Monitor Chassis: Sp-120: MODEL: PDS4250Vic DiÎncă nu există evaluări
- DatasheedDocument8 paginiDatasheedTarlei AlmeidaÎncă nu există evaluări
- Datasheet AEAT-6600Document11 paginiDatasheet AEAT-6600ArminÎncă nu există evaluări
- Manual VelodineDocument43 paginiManual VelodineAlvin Badoo AlvinOriginal BadooÎncă nu există evaluări
- Agilent ADNB-6001 and ADNB-6002 Laser Mouse Bundles: DatasheetDocument52 paginiAgilent ADNB-6001 and ADNB-6002 Laser Mouse Bundles: DatasheetKolja KallÎncă nu există evaluări
- HBCS 1100Document7 paginiHBCS 1100Xavi Sintas MolesÎncă nu există evaluări
- Human Turntable MakingDocument27 paginiHuman Turntable MakingPrasanna TÎncă nu există evaluări
- Esp32-Solo-1 Datasheet enDocument24 paginiEsp32-Solo-1 Datasheet enRAJ VIGNESHÎncă nu există evaluări
- Sony Dsr-pd175 - pd177 - pd198 Service ManualDocument249 paginiSony Dsr-pd175 - pd177 - pd198 Service ManualPrime Lens100% (4)
- Aiwa Csd-td20 Td21Document0 paginiAiwa Csd-td20 Td21parascoliÎncă nu există evaluări
- Proyector Sony VPL-CX21 PDFDocument4 paginiProyector Sony VPL-CX21 PDFAle Var CamÎncă nu există evaluări
- Esp32 Solo 1 Datasheet En-1384705Document27 paginiEsp32 Solo 1 Datasheet En-1384705Inventor TestÎncă nu există evaluări
- Dem16216syh LyDocument22 paginiDem16216syh LyjoachinÎncă nu există evaluări
- Analog Solutions PDFDocument295 paginiAnalog Solutions PDFEPCOMUSAÎncă nu există evaluări
- Daewoo Dla32c7lmbd PDFDocument56 paginiDaewoo Dla32c7lmbd PDFJesus PerezÎncă nu există evaluări
- Datasheet Optical Mouse SensorDocument14 paginiDatasheet Optical Mouse Sensorbeppes66Încă nu există evaluări
- LGDocument28 paginiLGabdessÎncă nu există evaluări
- SCD 2080R DatasheetDocument2 paginiSCD 2080R DatasheetNur Mohamad Abadi RidzuanÎncă nu există evaluări
- 63-Hdl64es2g Hdl-64e s2 CD Hdl-64e s2 Users Manual Low ResDocument43 pagini63-Hdl64es2g Hdl-64e s2 CD Hdl-64e s2 Users Manual Low ResSajeesh ThambirajÎncă nu există evaluări
- Acer S190WL S196WL 2chip 20120602 A00 Service ManualDocument66 paginiAcer S190WL S196WL 2chip 20120602 A00 Service ManualDoru RazvanÎncă nu există evaluări
- Sony Dsc-h10 Service Manual LeDocument69 paginiSony Dsc-h10 Service Manual LeJonathan Pardo JtechSolutionsÎncă nu există evaluări
- Absolute EncoderDocument7 paginiAbsolute EncoderMark TorresÎncă nu există evaluări
- Vizio Vw32l HDTV Service ManualDocument43 paginiVizio Vw32l HDTV Service ManualB.r. ArturoÎncă nu există evaluări
- Monitor Samsung 5807Document57 paginiMonitor Samsung 5807pepitito22Încă nu există evaluări
- AEAT 9000 1GSH0 Full Option Ultra Precision 17 Bit Absolute Single Turn Encoder PDFDocument8 paginiAEAT 9000 1GSH0 Full Option Ultra Precision 17 Bit Absolute Single Turn Encoder PDFNguyen Quang VinhÎncă nu există evaluări
- LC MeterDocument10 paginiLC MeterYenidir TeknoÎncă nu există evaluări
- Philips Chassis.q528.2e LaDocument135 paginiPhilips Chassis.q528.2e Lavideoson0% (1)
- PhilipsDocument135 paginiPhilipsBebby ManÎncă nu există evaluări
- Dpc-7200n Daewoo DVD Portable PlayerDocument42 paginiDpc-7200n Daewoo DVD Portable PlayermaurorzhzÎncă nu există evaluări
- 2) Om30psDocument8 pagini2) Om30psshinjikenny100% (1)
- Sony CDPX777ES CD SMDocument41 paginiSony CDPX777ES CD SMczeslawastachowialpÎncă nu există evaluări
- Virtual Boy Architecture: Architecture of Consoles: A Practical Analysis, #17De la EverandVirtual Boy Architecture: Architecture of Consoles: A Practical Analysis, #17Încă nu există evaluări
- Exploring Arduino: Tools and Techniques for Engineering WizardryDe la EverandExploring Arduino: Tools and Techniques for Engineering WizardryEvaluare: 4.5 din 5 stele4.5/5 (5)
- CCTV Surveillance: Video Practices and TechnologyDe la EverandCCTV Surveillance: Video Practices and TechnologyEvaluare: 4 din 5 stele4/5 (1)
- Beginning Digital Electronics through ProjectsDe la EverandBeginning Digital Electronics through ProjectsEvaluare: 5 din 5 stele5/5 (1)
- Workshop Practice Series - BooksDocument8 paginiWorkshop Practice Series - Bookscatapix100% (5)
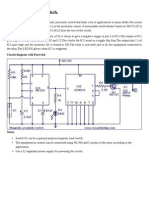
- Magnetic Proximity Switch.Document1 paginăMagnetic Proximity Switch.elvergonzalez1Încă nu există evaluări
- Parts List For A Miniature Low RateDocument1 paginăParts List For A Miniature Low Rateelvergonzalez1Încă nu există evaluări
- Ignition For Old CarsDocument2 paginiIgnition For Old Carselvergonzalez1Încă nu există evaluări
- Lsi/Csi: Digital Lock For Automotive IgnitionsDocument4 paginiLsi/Csi: Digital Lock For Automotive Ignitionselvergonzalez1Încă nu există evaluări
- Digital Tachometer Using Arduino Plus Speed Control.Document3 paginiDigital Tachometer Using Arduino Plus Speed Control.elvergonzalez1Încă nu există evaluări
- 20 - Metalwork and Machining Hints and TipsDocument49 pagini20 - Metalwork and Machining Hints and Tipsbatazivo0% (1)
- Low Cost Fire Alarm CircuitDocument2 paginiLow Cost Fire Alarm CircuitmohitÎncă nu există evaluări
- Thermostat Using LM56Document2 paginiThermostat Using LM56elvergonzalez1Încă nu există evaluări
- Electronic Combination Lock CircuitDocument2 paginiElectronic Combination Lock Circuitelvergonzalez1Încă nu există evaluări
- KW Low SchemDocument1 paginăKW Low Schemelvergonzalez1Încă nu există evaluări
- RF Based Wireless Remote Control SystemDocument4 paginiRF Based Wireless Remote Control Systemelvergonzalez1Încă nu există evaluări
- KW High SchemDocument1 paginăKW High Schemelvergonzalez1Încă nu există evaluări
- Air Flow Detector Circuit.Document1 paginăAir Flow Detector Circuit.elvergonzalez1Încă nu există evaluări
- Digital Thermometer Circuit.Document2 paginiDigital Thermometer Circuit.elvergonzalez1100% (1)
- Digital Code Lock Using Arduino With LCD Display and User Defined PasswordDocument7 paginiDigital Code Lock Using Arduino With LCD Display and User Defined Passwordelvergonzalez1100% (1)
- Digital Tachometer Using Arduino Plus Speed Control.Document3 paginiDigital Tachometer Using Arduino Plus Speed Control.elvergonzalez1Încă nu există evaluări
- Everything That Moves ALARM CircuitDocument1 paginăEverything That Moves ALARM Circuitelvergonzalez1Încă nu există evaluări
- Electronic Combination Lock CircuitDocument2 paginiElectronic Combination Lock Circuitelvergonzalez1Încă nu există evaluări
- Design and Construction of A Remote Controlled Fan RegulatorDocument8 paginiDesign and Construction of A Remote Controlled Fan RegulatorDeepak ParasharÎncă nu există evaluări
- Magnetic Proximity Switch.Document1 paginăMagnetic Proximity Switch.elvergonzalez1Încă nu există evaluări
- Electronic Siren CircuitDocument2 paginiElectronic Siren Circuitelvergonzalez1Încă nu există evaluări
- Erii4 Ic History Op AmpsDocument10 paginiErii4 Ic History Op Ampselvergonzalez1Încă nu există evaluări
- Air Flow Detector Circuit.Document1 paginăAir Flow Detector Circuit.elvergonzalez1Încă nu există evaluări
- Colt AR-15 Rifle Lightning LinkDocument5 paginiColt AR-15 Rifle Lightning Linkelvergonzalez1100% (2)
- Colt AR-15 Rifle Lightning LinkDocument5 paginiColt AR-15 Rifle Lightning Linkelvergonzalez1100% (2)
- Small Wonders - Registered Drop in Auto SearsDocument5 paginiSmall Wonders - Registered Drop in Auto SearsMarcos Morsch100% (8)
- Stinger ManualDocument59 paginiStinger Manualelvergonzalez1Încă nu există evaluări
- Mod Firearm Beretta - US Patent 5596162Document9 paginiMod Firearm Beretta - US Patent 5596162luanfunari100% (1)
- HK 91, SR9,93,94, SP89Document3 paginiHK 91, SR9,93,94, SP89elvergonzalez1Încă nu există evaluări
- Design and Construction of LED Matrix DisplayDocument7 paginiDesign and Construction of LED Matrix DisplayTseren TsekuÎncă nu există evaluări
- Sony+KDL40EX525 Brazil AZ2FDocument95 paginiSony+KDL40EX525 Brazil AZ2FJorge Fernando de TivantaÎncă nu există evaluări
- Gs33m50f30-40e 008Document18 paginiGs33m50f30-40e 008Saadullah SiddiquiÎncă nu există evaluări
- BlackStar Meteor 600 Service ManualDocument18 paginiBlackStar Meteor 600 Service Manualrichrg18100% (2)
- Logic Lab 1 - Digital Abstraction (5 Gates)Document16 paginiLogic Lab 1 - Digital Abstraction (5 Gates)ram010Încă nu există evaluări
- Top 10 Silicon Wafer Manufacturing Companies in The WorldDocument14 paginiTop 10 Silicon Wafer Manufacturing Companies in The WorldjackÎncă nu există evaluări
- 4 PC 40 UDocument8 pagini4 PC 40 Usadhanabhawani1278Încă nu există evaluări
- 2SK241Document7 pagini2SK241ytnateÎncă nu există evaluări
- Automotive, Programmable Stepper Driver: Features and Benefits DescriptionDocument45 paginiAutomotive, Programmable Stepper Driver: Features and Benefits DescriptionCHADDOU100% (1)
- Carlo Gavazzi Relevador en EsolidoDocument6 paginiCarlo Gavazzi Relevador en EsolidoJair Ramirez JimenezÎncă nu există evaluări
- Features Description: SBOS014Document17 paginiFeatures Description: SBOS014Aishwarya buwaÎncă nu există evaluări
- Actuator-Sensor-Interface: I/O Modules For Operation in The Control Cabinet (IP 20)Document22 paginiActuator-Sensor-Interface: I/O Modules For Operation in The Control Cabinet (IP 20)chochoroyÎncă nu există evaluări
- ECT435 Module1 PCBDocument21 paginiECT435 Module1 PCBmy mailÎncă nu există evaluări
- PowerMesh IGBT 120HDDocument13 paginiPowerMesh IGBT 120HDRicky CoxÎncă nu există evaluări
- Ultimate 486 Benchmark ComparisonDocument16 paginiUltimate 486 Benchmark ComparisonDanijela DinÎncă nu există evaluări
- EEE F312 Power Systems 2014-15Document3 paginiEEE F312 Power Systems 2014-15Harsha DuttaÎncă nu există evaluări
- C 102Document1 paginăC 102Nicky DragutescuÎncă nu există evaluări
- SEMIKRON Product-Catalogue EN PDFDocument126 paginiSEMIKRON Product-Catalogue EN PDFAngelo Aco Mendoza100% (1)
- HE IgniterDocument17 paginiHE IgniterSahil MishraÎncă nu există evaluări
- Isolated Power SupplyDocument20 paginiIsolated Power SupplyHoangÎncă nu există evaluări
- Experiment # 1: Figure 1: Circuit DiagramDocument4 paginiExperiment # 1: Figure 1: Circuit DiagramMahnoor Siddiqi100% (1)
- ARM7 UM10139 - LPC214xDocument354 paginiARM7 UM10139 - LPC214xnilmak2u2Încă nu există evaluări
- 4 Bit Shift RegisterDocument6 pagini4 Bit Shift Registerpenchal_chinniÎncă nu există evaluări
- Manual MVDP1085Document40 paginiManual MVDP1085Ronan Nolasco100% (1)
- Fuzzy LogicDocument16 paginiFuzzy LogicDragatoÎncă nu există evaluări
- MVAJ 05 Trip RelayDocument9 paginiMVAJ 05 Trip RelayKT MENON100% (1)
- Anomalous Doping Effect in Black Phosphorene From First-Principles CalculationsDocument8 paginiAnomalous Doping Effect in Black Phosphorene From First-Principles Calculationsh shekarlabÎncă nu există evaluări
- Sony DCR SR 47Document65 paginiSony DCR SR 47Mitesh ChauhanÎncă nu există evaluări
- PhysicsDocument18 paginiPhysicsHimanshu DidwaniaÎncă nu există evaluări
- Single Vs MulticoreDocument2 paginiSingle Vs MulticoreARTHEYA.R.S.Încă nu există evaluări