S-ar putea să vă placă și
- Modern Intelligent Instruments - Theory and ApplicationDe la EverandModern Intelligent Instruments - Theory and ApplicationÎncă nu există evaluări
- Real-Time Fuzzy Microcontroller PDFDocument6 paginiReal-Time Fuzzy Microcontroller PDFsamyÎncă nu există evaluări
- Dan Saks C++ in Embedded SystemsDocument24 paginiDan Saks C++ in Embedded SystemsarunksahaÎncă nu există evaluări
- Lambda PDFDocument24 paginiLambda PDFTrinidad MerriweatherÎncă nu există evaluări
- Diploma Project 1st Presentation PPT TemplateDocument13 paginiDiploma Project 1st Presentation PPT TemplateJay PatelÎncă nu există evaluări
- LoRa v01 PDFDocument38 paginiLoRa v01 PDFEmilian LpÎncă nu există evaluări
- Curs Symfony - EnglezaDocument295 paginiCurs Symfony - EnglezalucianluciÎncă nu există evaluări
- T-MXONE-7.0-C1-IM v1.3Document403 paginiT-MXONE-7.0-C1-IM v1.3assav0% (1)
- MMCM VS PLLDocument1 paginăMMCM VS PLLVijay KumarÎncă nu există evaluări
- CS6703-Grid and Cloud ComputingDocument11 paginiCS6703-Grid and Cloud ComputingBharath Reddy Mannem100% (1)
- Trajectory Modification Considering Dynamic Constraints of Autonomous RobotsDocument6 paginiTrajectory Modification Considering Dynamic Constraints of Autonomous RobotsOswin SoÎncă nu există evaluări
- Position Weight MatrixDocument4 paginiPosition Weight MatrixAnonymous E4Rbo2sÎncă nu există evaluări
- RNSF Curs1Document51 paginiRNSF Curs1Radu Alin BurteaÎncă nu există evaluări
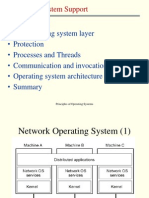
- Introduction: Operating System SupportDocument63 paginiIntroduction: Operating System SupportErmercado78Încă nu există evaluări
- Ball & Beam DocumentDocument8 paginiBall & Beam DocumentJorge PorrasÎncă nu există evaluări
- The 8284a Clock GeneratorDocument32 paginiThe 8284a Clock GeneratorBETHWEL KIPROTICH100% (1)
- Primii Pasi in Retelistica - InvataRetelisticaDocument54 paginiPrimii Pasi in Retelistica - InvataRetelisticaAdrian Anghel0% (1)
- Simple, Real-Time Obstacle Avoidance Algorithm For Mobile RobotsDocument6 paginiSimple, Real-Time Obstacle Avoidance Algorithm For Mobile RobotsStefania MihaiÎncă nu există evaluări
- 3.1.2 - IP Behavior I - FragmentationDocument41 pagini3.1.2 - IP Behavior I - FragmentationClaudio StroeÎncă nu există evaluări
- CRYPTOLOGYDocument8 paginiCRYPTOLOGYNur HayatiÎncă nu există evaluări
- Vxworks Vs RTLinuxDocument5 paginiVxworks Vs RTLinuxNithin RamakrishnaÎncă nu există evaluări
- Using LEGO NXT Mobile Robots With LabVIEW For Undergraduate Courses On MechatronicsDocument7 paginiUsing LEGO NXT Mobile Robots With LabVIEW For Undergraduate Courses On MechatronicsPravin BeheraÎncă nu există evaluări
- Vxworks Case StudyDocument11 paginiVxworks Case StudyPathella SudhakarÎncă nu există evaluări
- Study of DVMRP, MOSPF, CBT, PIM, MBONE, EIGRP, CIDRDocument6 paginiStudy of DVMRP, MOSPF, CBT, PIM, MBONE, EIGRP, CIDRnishiÎncă nu există evaluări
- Two Degrees of Freedom PID Control For Active Vibration Control of StructuresDocument9 paginiTwo Degrees of Freedom PID Control For Active Vibration Control of StructuresndjedouiÎncă nu există evaluări
- Role of IoT in EducationDocument4 paginiRole of IoT in EducationPondicherry UniversityÎncă nu există evaluări
- Hart Appguide PDFDocument156 paginiHart Appguide PDFealarconi7649Încă nu există evaluări
- Self Stabilized Platform PDFDocument4 paginiSelf Stabilized Platform PDFAnurag RanaÎncă nu există evaluări
- Multi-Core in JAVA/JVM: Concurrency Prior To Java 5: Synchronization and ThreadsDocument14 paginiMulti-Core in JAVA/JVM: Concurrency Prior To Java 5: Synchronization and ThreadsShravan KumarÎncă nu există evaluări
- ARP Tables Lookup AlgorithmsDocument3 paginiARP Tables Lookup AlgorithmsDouglas ManginiÎncă nu există evaluări
- VoIP - Voice Over IP On LinuxDocument11 paginiVoIP - Voice Over IP On LinuxWeb devÎncă nu există evaluări
- Toolbox PLUS Users Manual 3.11.0Document238 paginiToolbox PLUS Users Manual 3.11.0pyrodidoÎncă nu există evaluări
- Problem Solving With C++: The Object of ProgrammingDocument19 paginiProblem Solving With C++: The Object of ProgrammingomerqasÎncă nu există evaluări
- Embedded Operating SystemsDocument34 paginiEmbedded Operating SystemssanssecoursÎncă nu există evaluări
- Introducere in Matlab PDFDocument77 paginiIntroducere in Matlab PDFAlecs BalaÎncă nu există evaluări
- Internet of Things (IoT) Implementation in Learning Institutions - A Systematic Literature ReviewDocument48 paginiInternet of Things (IoT) Implementation in Learning Institutions - A Systematic Literature Reviewpecescd100% (1)
- Robust Face Recognition Under Difficult Lighting ConditionsDocument4 paginiRobust Face Recognition Under Difficult Lighting ConditionsijecctÎncă nu există evaluări
- How To Make Mobile Controlled Robot Using BluetoothDocument11 paginiHow To Make Mobile Controlled Robot Using BluetoothAvian WorkshopsÎncă nu există evaluări
- Conceptual Architecture of Mozilla FirefoxDocument14 paginiConceptual Architecture of Mozilla FirefoxKapil Aditani100% (1)
- CNN Project - GTSRB DatasetDocument4 paginiCNN Project - GTSRB DatasetMohamed ElHefnawy100% (2)
- Fuzzy Jerry M. MendelDocument2 paginiFuzzy Jerry M. MendelJuan Pablo Rodriguez HerreraÎncă nu există evaluări
- Vxworks For Pentium Architecture Supplement PDFDocument40 paginiVxworks For Pentium Architecture Supplement PDFNitesh SinghÎncă nu există evaluări
- Modbus Ethernet ManualDocument52 paginiModbus Ethernet ManualCarlos MercadoÎncă nu există evaluări
- Hart Driver ManualDocument119 paginiHart Driver ManualAntonio VerneÎncă nu există evaluări
- Information Systems Security LAB: RSA Cryptography AlgorithmDocument9 paginiInformation Systems Security LAB: RSA Cryptography AlgorithmAbdullah Al-HallakÎncă nu există evaluări
- TeslaSCADA IDE UserManualDocument459 paginiTeslaSCADA IDE UserManualIaros RodriguezÎncă nu există evaluări
- W11 Tutorial Solutions Chapter 13Document5 paginiW11 Tutorial Solutions Chapter 13mamnunbd100% (4)
- sbin/ifconfig Eth0 192.168.112.23 Netmask 255.255.255.0 Broadcast 192.168.0.255 IfconfigDocument5 paginisbin/ifconfig Eth0 192.168.112.23 Netmask 255.255.255.0 Broadcast 192.168.0.255 IfconfigIon CaimacanÎncă nu există evaluări
- Real Time Vehicle Tracking On Google Maps Using Raspberry Pi Web ServerDocument6 paginiReal Time Vehicle Tracking On Google Maps Using Raspberry Pi Web ServerEditor IJRITCCÎncă nu există evaluări
- HMI and SCADA SystemsDocument9 paginiHMI and SCADA SystemsFran JimenezÎncă nu există evaluări
- ASIMODocument16 paginiASIMOArun DineshÎncă nu există evaluări
- Intrebari ReteleDocument54 paginiIntrebari ReteleAnastasia SusciucÎncă nu există evaluări
- RTOS VxWorksDocument8 paginiRTOS VxWorksAshraful HimelÎncă nu există evaluări
- Introduction To Algorithms by Cormen: Special Features of BookDocument4 paginiIntroduction To Algorithms by Cormen: Special Features of BookAmit TiwariÎncă nu există evaluări
- ElGamal Signature SchemeDocument3 paginiElGamal Signature SchemeJibin PrasadÎncă nu există evaluări
- Wind River VxWorks Platform 6.9 - OverviewDocument3 paginiWind River VxWorks Platform 6.9 - OverviewciruvekofÎncă nu există evaluări
- IOT in Education FinalDocument8 paginiIOT in Education FinalAPS Fort Road100% (1)
- Switched Systems, Stability of Switched Systems in Sense of LyapunovDocument200 paginiSwitched Systems, Stability of Switched Systems in Sense of LyapunovMamdouh KhudaydusÎncă nu există evaluări
- ModTech2015 Program Book of AbstractsDocument293 paginiModTech2015 Program Book of AbstractsBuluc GheorgheÎncă nu există evaluări
- Host-Compiled Multicore RTOS Simulator For Embedded Real-Time Software DevelopmentDocument6 paginiHost-Compiled Multicore RTOS Simulator For Embedded Real-Time Software DevelopmentRey JohnÎncă nu există evaluări
- Threshold Voltage Modeling On Nanocrystalline Silicon Thin Film Transistors Navneet GuptaDocument5 paginiThreshold Voltage Modeling On Nanocrystalline Silicon Thin Film Transistors Navneet Guptanithin s gowdaÎncă nu există evaluări
- ECE 429 - Introduction To VLSI Design Fall 2015Document2 paginiECE 429 - Introduction To VLSI Design Fall 2015nithin s gowdaÎncă nu există evaluări
- Vedic MathsDocument8 paginiVedic Mathsnithin s gowda100% (1)
- GregoryDocument9 paginiGregorySalman AghaÎncă nu există evaluări
- CompaniesDocument1 paginăCompaniesnithin s gowdaÎncă nu există evaluări
- Nine Components of Mission Statement: Mohamed Adib Nazim Bin Mohd Yusoff AP160521Document3 paginiNine Components of Mission Statement: Mohamed Adib Nazim Bin Mohd Yusoff AP160521Adib NazimÎncă nu există evaluări
- CollegeApp DocumentationDocument165 paginiCollegeApp Documentationkalpesh khandelwalÎncă nu există evaluări
- SDLCDocument9 paginiSDLCTanmay JoshiÎncă nu există evaluări
- Sujeet's Milli Blog - 7 Lessons I Learnt During Facebook InternshipDocument7 paginiSujeet's Milli Blog - 7 Lessons I Learnt During Facebook InternshipRahul VenkatÎncă nu există evaluări
- Visual Controls: User GuideDocument32 paginiVisual Controls: User GuidejoseÎncă nu există evaluări
- General Elements of A C ProgramDocument6 paginiGeneral Elements of A C ProgramSundar GuyahÎncă nu există evaluări
- (INFO) ANDROID DEVICE PARTITIONS and FILESYSTEMS - XDA Developers ForumsDocument12 pagini(INFO) ANDROID DEVICE PARTITIONS and FILESYSTEMS - XDA Developers Forumssdancer75Încă nu există evaluări
- Managing Dataguard MonitoDocument4 paginiManaging Dataguard Monitomss5259Încă nu există evaluări
- Cs606 Advanced Database TechnologyDocument2 paginiCs606 Advanced Database TechnologyKarthik RlÎncă nu există evaluări
- Computer, Internet, Web, and EmailDocument48 paginiComputer, Internet, Web, and EmailAnil Penumacha50% (2)
- PDFDocument243 paginiPDFcjay100% (1)
- Address: 0x7e6f74e7Document1 paginăAddress: 0x7e6f74e7Tom ConnerÎncă nu există evaluări
- 20483B ENU TrainerHandbookDocument560 pagini20483B ENU TrainerHandbookLuis González Castro100% (3)
- 1.introduccion A CursoDocument10 pagini1.introduccion A Cursobelita1Încă nu există evaluări
- Chapter 1. Introduction To: C# ProgrammingDocument31 paginiChapter 1. Introduction To: C# ProgrammingJuan OrdoñezÎncă nu există evaluări
- Band in A Box 2009 ManualDocument511 paginiBand in A Box 2009 ManualAlexander WardÎncă nu există evaluări
- CHAPTER 4: Advanced Operations With Word: ObjectivesDocument29 paginiCHAPTER 4: Advanced Operations With Word: ObjectivesDiana EngalladoÎncă nu există evaluări
- Impact Analysis ChecklistDocument3 paginiImpact Analysis Checklistzuggo8485920% (1)
- Epicor9VantageVistaLabBook WednesdayDocument202 paginiEpicor9VantageVistaLabBook Wednesdayjhavrilla1Încă nu există evaluări
- ManualDocument319 paginiManualIván LassoÎncă nu există evaluări
- Linux BriefDocument3 paginiLinux BriefMohamed RamahÎncă nu există evaluări
- CEVA CI Brainware Admin Guide1.2Document27 paginiCEVA CI Brainware Admin Guide1.2Jorge CastellanosÎncă nu există evaluări
- imageRUNNER ADVANCE 5235 AGREGAR FONDOS DE PANTALLADocument9 paginiimageRUNNER ADVANCE 5235 AGREGAR FONDOS DE PANTALLAVelarde Antonio JoseÎncă nu există evaluări
- Secure NetworkDocument4 paginiSecure NetworkNirmalakumaran PrakalathanÎncă nu există evaluări
- Damage HUDDocument5 paginiDamage HUDAdrian Osorio RestrepoÎncă nu există evaluări
- RUTTER G2 VDR USB Data RecoveryDocument5 paginiRUTTER G2 VDR USB Data RecoveryAdi PrasetyoÎncă nu există evaluări
- Isabel MercadoDocument1 paginăIsabel MercadoSyed Zahid KhadriÎncă nu există evaluări
- Dcsea LZ Ais Velo12f01 2022 07 29Document155 paginiDcsea LZ Ais Velo12f01 2022 07 29ChandrahasÎncă nu există evaluări
- Hexagon PC Dmis 02 - Navigating The User InterfaceDocument32 paginiHexagon PC Dmis 02 - Navigating The User InterfacenalbanskiÎncă nu există evaluări
- AU All CodeDocument7 paginiAU All CodeJohnMiresÎncă nu există evaluări
- ChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessDe la EverandChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessÎncă nu există evaluări
- Fundamentals of Data Engineering: Plan and Build Robust Data SystemsDe la EverandFundamentals of Data Engineering: Plan and Build Robust Data SystemsEvaluare: 5 din 5 stele5/5 (1)
- Excel 2023 for Beginners: A Complete Quick Reference Guide from Beginner to Advanced with Simple Tips and Tricks to Master All Essential Fundamentals, Formulas, Functions, Charts, Tools, & ShortcutsDe la EverandExcel 2023 for Beginners: A Complete Quick Reference Guide from Beginner to Advanced with Simple Tips and Tricks to Master All Essential Fundamentals, Formulas, Functions, Charts, Tools, & ShortcutsÎncă nu există evaluări
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveDe la EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveÎncă nu există evaluări
- Python for Beginners: A Crash Course Guide to Learn Python in 1 WeekDe la EverandPython for Beginners: A Crash Course Guide to Learn Python in 1 WeekEvaluare: 4.5 din 5 stele4.5/5 (7)
- Sweet Spot UX: Communicating User Experience to Stakeholders, Decision Makers and Other HumansDe la EverandSweet Spot UX: Communicating User Experience to Stakeholders, Decision Makers and Other HumansEvaluare: 4.5 din 5 stele4.5/5 (5)
- Microsoft Outlook Guide to Success: Learn Smart Email Practices and Calendar Management for a Smooth Workflow [II EDITION]De la EverandMicrosoft Outlook Guide to Success: Learn Smart Email Practices and Calendar Management for a Smooth Workflow [II EDITION]Evaluare: 5 din 5 stele5/5 (4)
- Microsoft Excel Guide for Success: Transform Your Work with Microsoft Excel, Unleash Formulas, Functions, and Charts to Optimize Tasks and Surpass Expectations [II EDITION]De la EverandMicrosoft Excel Guide for Success: Transform Your Work with Microsoft Excel, Unleash Formulas, Functions, and Charts to Optimize Tasks and Surpass Expectations [II EDITION]Evaluare: 5 din 5 stele5/5 (3)
- Optimizing DAX: Improving DAX performance in Microsoft Power BI and Analysis ServicesDe la EverandOptimizing DAX: Improving DAX performance in Microsoft Power BI and Analysis ServicesÎncă nu există evaluări
- Agile Project Management: Scrum for BeginnersDe la EverandAgile Project Management: Scrum for BeginnersEvaluare: 4 din 5 stele4/5 (7)
- Designing Data-Intensive Applications: The Big Ideas Behind Reliable, Scalable, and Maintainable SystemsDe la EverandDesigning Data-Intensive Applications: The Big Ideas Behind Reliable, Scalable, and Maintainable SystemsEvaluare: 5 din 5 stele5/5 (6)
- Microservices Patterns: With examples in JavaDe la EverandMicroservices Patterns: With examples in JavaEvaluare: 5 din 5 stele5/5 (2)
- Microsoft PowerPoint Guide for Success: Learn in a Guided Way to Create, Edit & Format Your Presentations Documents to Visual Explain Your Projects & Surprise Your Bosses And Colleagues | Big Four Consulting Firms MethodDe la EverandMicrosoft PowerPoint Guide for Success: Learn in a Guided Way to Create, Edit & Format Your Presentations Documents to Visual Explain Your Projects & Surprise Your Bosses And Colleagues | Big Four Consulting Firms MethodEvaluare: 5 din 5 stele5/5 (4)
- Computer Science Beginners Crash Course: Coding Data, Python, Algorithms & HackingDe la EverandComputer Science Beginners Crash Course: Coding Data, Python, Algorithms & HackingEvaluare: 3.5 din 5 stele3.5/5 (12)
- Microsoft Teams Guide for Success: Mastering Communication, Collaboration, and Virtual Meetings with Colleagues & ClientsDe la EverandMicrosoft Teams Guide for Success: Mastering Communication, Collaboration, and Virtual Meetings with Colleagues & ClientsEvaluare: 5 din 5 stele5/5 (4)
- Learn Power BI: A beginner's guide to developing interactive business intelligence solutions using Microsoft Power BIDe la EverandLearn Power BI: A beginner's guide to developing interactive business intelligence solutions using Microsoft Power BIEvaluare: 5 din 5 stele5/5 (1)
- Microsoft Word Guide for Success: From Basics to Brilliance in Achieving Faster and Smarter Results [II EDITION]De la EverandMicrosoft Word Guide for Success: From Basics to Brilliance in Achieving Faster and Smarter Results [II EDITION]Evaluare: 5 din 5 stele5/5 (4)
- Kubernetes: The Updated Guide to Master Kubernetes for EveryoneDe la EverandKubernetes: The Updated Guide to Master Kubernetes for EveryoneEvaluare: 3 din 5 stele3/5 (3)
- Artificial Intelligence in Practice: How 50 Successful Companies Used AI and Machine Learning to Solve ProblemsDe la EverandArtificial Intelligence in Practice: How 50 Successful Companies Used AI and Machine Learning to Solve ProblemsEvaluare: 4.5 din 5 stele4.5/5 (38)
- Scrum: Understanding Scrum at a Deeper Level and Mastering Agile Project ManagementDe la EverandScrum: Understanding Scrum at a Deeper Level and Mastering Agile Project ManagementEvaluare: 3.5 din 5 stele3.5/5 (2)
- Notion for Beginners: Notion for Work, Play, and ProductivityDe la EverandNotion for Beginners: Notion for Work, Play, and ProductivityEvaluare: 4 din 5 stele4/5 (8)
- Creating Online Courses with ChatGPT | A Step-by-Step Guide with Prompt TemplatesDe la EverandCreating Online Courses with ChatGPT | A Step-by-Step Guide with Prompt TemplatesEvaluare: 4 din 5 stele4/5 (4)
- Excel Formulas That Automate Tasks You No Longer Have Time ForDe la EverandExcel Formulas That Automate Tasks You No Longer Have Time ForEvaluare: 5 din 5 stele5/5 (1)
- The Product Momentum Gap: Bringing together product strategy and customer valueDe la EverandThe Product Momentum Gap: Bringing together product strategy and customer valueEvaluare: 5 din 5 stele5/5 (1)