S-ar putea să vă placă și
- Factorization AlgebrasDocument12 paginiFactorization AlgebrasJason PayneÎncă nu există evaluări
- Two Approaches To Modelling The Universe: Synthetic Differential Geometry and Frame-Valued SetsDocument16 paginiTwo Approaches To Modelling The Universe: Synthetic Differential Geometry and Frame-Valued SetsEMellaÎncă nu există evaluări
- Lesson 9: Einstein Field Equations: Notes From Prof. Susskind Video Lectures Publicly Available On YoutubeDocument45 paginiLesson 9: Einstein Field Equations: Notes From Prof. Susskind Video Lectures Publicly Available On YoutubeOpulentÎncă nu există evaluări
- Optimization On FractalsDocument17 paginiOptimization On FractalsMaria Isabel BinimelisÎncă nu există evaluări
- Week 1Document7 paginiWeek 1Frostyshad ShadÎncă nu există evaluări
- Probabilistic and Statistical Aspects of Quantum Theory, by A. S. Holevo, NorthDocument7 paginiProbabilistic and Statistical Aspects of Quantum Theory, by A. S. Holevo, NorthHarryÎncă nu există evaluări
- Introduction To General RelativityDocument72 paginiIntroduction To General RelativitypankajÎncă nu există evaluări
- From Brans-Dicke Theory To A Newtonian GravityDocument4 paginiFrom Brans-Dicke Theory To A Newtonian GravitycrocoaliÎncă nu există evaluări
- Applications of Reimannian Geometry in Physics (General Theory of Relativity)Document14 paginiApplications of Reimannian Geometry in Physics (General Theory of Relativity)Amirhossein HassanabadiÎncă nu există evaluări
- Lecture Notes On Topological Quantum Field Theory SPRING 2021 (Very Preliminary Version With Many Mistakes)Document27 paginiLecture Notes On Topological Quantum Field Theory SPRING 2021 (Very Preliminary Version With Many Mistakes)Husam ZaheerÎncă nu există evaluări
- 801-825 Differentiation Formulae (For Latex)Document14 pagini801-825 Differentiation Formulae (For Latex)Muhammad ZainÎncă nu există evaluări
- Path Formulation Bifurcation TheoryDocument16 paginiPath Formulation Bifurcation TheoryJohn StarrettÎncă nu există evaluări
- Wightman AxiomsDocument4 paginiWightman AxiomsShivank MehraÎncă nu există evaluări
- Fa Eng 2017Document4 paginiFa Eng 2017SmitaÎncă nu există evaluări
- Fuzzy Circle and New Fuzzy Sphere Through Confining Potentials and Energy CutoffsDocument32 paginiFuzzy Circle and New Fuzzy Sphere Through Confining Potentials and Energy Cutoffshuevonomar05Încă nu există evaluări
- Jian-Huang She - A Matrix Model For Misner Universe and Closed String TachyonsDocument21 paginiJian-Huang She - A Matrix Model For Misner Universe and Closed String TachyonsHuntsmithÎncă nu există evaluări
- General Principles of Brane Kinematics and DynamicsDocument12 paginiGeneral Principles of Brane Kinematics and DynamicsOliver BardinÎncă nu există evaluări
- A New Understanding of Particles by G - Flow Interpretation of Differential EquationDocument10 paginiA New Understanding of Particles by G - Flow Interpretation of Differential EquationDon HassÎncă nu există evaluări
- Active Vs Passive Transformations in Field TheoriesDocument6 paginiActive Vs Passive Transformations in Field TheoriesDobaÎncă nu există evaluări
- Lecture 3: Perturbative Renormalization (Continued) : 3.1. Local Functionals in A Classical Eld TheoryDocument17 paginiLecture 3: Perturbative Renormalization (Continued) : 3.1. Local Functionals in A Classical Eld TheoryluisdanielÎncă nu există evaluări
- Gauss-Codazzi EquationsDocument5 paginiGauss-Codazzi EquationsaguiÎncă nu există evaluări
- From Brans-Dicke Theory To Newtonian GravityDocument4 paginiFrom Brans-Dicke Theory To Newtonian GravitycrocoaliÎncă nu există evaluări
- Vectors and Tensors in Curved Space Time: Physics Dep., University College CorkDocument19 paginiVectors and Tensors in Curved Space Time: Physics Dep., University College Corkrebe53Încă nu există evaluări
- Solving Fractional Differential Equations Using Fixed Point Results in Generalized Metric Spaces of Perovs TypeDocument12 paginiSolving Fractional Differential Equations Using Fixed Point Results in Generalized Metric Spaces of Perovs TypeMatthew SimeonÎncă nu există evaluări
- Lecture Notes in Mathematics 1824: Editors: J. - M. Morel, Cachan F. Takens, Groningen B. Teissier, ParisDocument190 paginiLecture Notes in Mathematics 1824: Editors: J. - M. Morel, Cachan F. Takens, Groningen B. Teissier, ParisVinicioÎncă nu există evaluări
- A New Hypothetical Solution To Gravitational Singularities: León, Spain, June 2019Document12 paginiA New Hypothetical Solution To Gravitational Singularities: León, Spain, June 2019M,,,Încă nu există evaluări
- Evans L.,Thompson R. Introduction To Algebraic Topology PDFDocument248 paginiEvans L.,Thompson R. Introduction To Algebraic Topology PDFmonteÎncă nu există evaluări
- On Two Classical Theorems of Algebraic Topology 1971Document14 paginiOn Two Classical Theorems of Algebraic Topology 1971michel.walz01Încă nu există evaluări
- Wavepackets On de Sitter Spacetime: João C. A. Barata and Marcos BrumDocument26 paginiWavepackets On de Sitter Spacetime: João C. A. Barata and Marcos Brummarcos.brum1176Încă nu există evaluări
- Etienne Ghys-Fluxos GeodesicosDocument55 paginiEtienne Ghys-Fluxos GeodesicosWily Sarmiento YucraÎncă nu există evaluări
- LQGDocument64 paginiLQGstephenÎncă nu există evaluări
- The Linear Momentum As A Tensor Function.: Facultad de Ciencias Físicas, Universidad Complutense de MadridDocument15 paginiThe Linear Momentum As A Tensor Function.: Facultad de Ciencias Físicas, Universidad Complutense de MadridJane JÎncă nu există evaluări
- New Worlds For Lie Theory: Math - Columbia.edu/ Okounkov/icm PDFDocument63 paginiNew Worlds For Lie Theory: Math - Columbia.edu/ Okounkov/icm PDFMarcelo SoaresÎncă nu există evaluări
- The New Relativity: NOVEMBER1, 1936 Physical ReviewDocument5 paginiThe New Relativity: NOVEMBER1, 1936 Physical ReviewJean ChaucaÎncă nu există evaluări
- GR NotesDocument13 paginiGR NotesbbteenagerÎncă nu există evaluări
- The Calculus of VariationsDocument52 paginiThe Calculus of VariationsKim HsiehÎncă nu există evaluări
- Oslo Second QuantDocument16 paginiOslo Second QuanthantglÎncă nu există evaluări
- Feynman DiagramsDocument27 paginiFeynman Diagramsb3ltaÎncă nu există evaluări
- Lie DerivativeDocument6 paginiLie Derivativegmkofinas9880Încă nu există evaluări
- T'hooft General RelativityDocument69 paginiT'hooft General Relativityaud_philÎncă nu există evaluări
- Introduction To General Relativity: Gerard 'T HooftDocument69 paginiIntroduction To General Relativity: Gerard 'T Hooftsaleemnasir2k7154Încă nu există evaluări
- A New Solution To Gravitational SingularitiesFOROCOCHESDocument11 paginiA New Solution To Gravitational SingularitiesFOROCOCHESM,,,Încă nu există evaluări
- Quantum Field Theory in Curved SpacetimeDocument18 paginiQuantum Field Theory in Curved SpacetimeAdriano Braga BarretoÎncă nu există evaluări
- Lecture II-19: 2 Super-Symmetric Yang-Mills Theories in Dimension Four: Part III, Topological ApplicationsDocument25 paginiLecture II-19: 2 Super-Symmetric Yang-Mills Theories in Dimension Four: Part III, Topological ApplicationsluisdanielÎncă nu există evaluări
- Genre L Course RaDocument108 paginiGenre L Course RaWilliam SmithÎncă nu există evaluări
- Looijenga Motivic MeasuresDocument26 paginiLooijenga Motivic MeasuresnguyenthehoangÎncă nu există evaluări
- Green's Functions in Perturbed Space-TimeDocument23 paginiGreen's Functions in Perturbed Space-TimeYuri Müller PlummÎncă nu există evaluări
- Hadamard J. - On Quasi-Analytic Functions (1925)Document2 paginiHadamard J. - On Quasi-Analytic Functions (1925)Leandro CamargoÎncă nu există evaluări
- John C. Baez - Spin Networks in Nonperturbative Quantum GravityDocument41 paginiJohn C. Baez - Spin Networks in Nonperturbative Quantum GravityLopmazÎncă nu există evaluări
- Introduction To General Relativity - G. T.hooftDocument68 paginiIntroduction To General Relativity - G. T.hooftmostafa-tallat70Încă nu există evaluări
- Chapter 1: Key Features of Quantum MechanicsDocument15 paginiChapter 1: Key Features of Quantum MechanicsBeenishMuazzamÎncă nu există evaluări
- EtaleDocument16 paginiEtaleVikas SrivastavaÎncă nu există evaluări
- Euclid Bams 1183539848Document64 paginiEuclid Bams 1183539848Michael PearsonÎncă nu există evaluări
- Generalized Stokes' Theorem: Colin M. Weller June 5 2020Document13 paginiGeneralized Stokes' Theorem: Colin M. Weller June 5 2020stephen kangereÎncă nu există evaluări
- Maths Project: Submitted By: Aniket Singha Class: 12 Section BDocument14 paginiMaths Project: Submitted By: Aniket Singha Class: 12 Section BSOUMYADEEP BHUINYAÎncă nu există evaluări
- Lecture Notes On Quantum MechanicsDocument391 paginiLecture Notes On Quantum MechanicslymanalphaÎncă nu există evaluări
- Field Strength MeterDocument9 paginiField Strength MeterVinod JagdaleÎncă nu există evaluări
- AlqamahDocument20 paginiAlqamahNadia AlfirdausiÎncă nu există evaluări
- Corporation Law Cases Set 1Document32 paginiCorporation Law Cases Set 1Rodney AtibulaÎncă nu există evaluări
- IDENTIFYING AND FORMING EQUIVALENT FRACTIONS 3RD CO Mrs BiscaydaDocument68 paginiIDENTIFYING AND FORMING EQUIVALENT FRACTIONS 3RD CO Mrs BiscaydaLilibeth BiscaydaÎncă nu există evaluări
- Evaluation of Modulus of Subgrade Reaction (KS) in Gravely Soils Based On SPT ResultsDocument5 paginiEvaluation of Modulus of Subgrade Reaction (KS) in Gravely Soils Based On SPT ResultsJ&T INGEOTECNIA SERVICIOS GENERALES SACÎncă nu există evaluări
- FULLER Thesaurus of Epigrams 1943Document406 paginiFULLER Thesaurus of Epigrams 1943Studentul2000100% (1)
- The Miracle of AdamDocument22 paginiThe Miracle of AdamJojo HohoÎncă nu există evaluări
- Week 3 CPAR Day 1Document4 paginiWeek 3 CPAR Day 1zessicrel mejiasÎncă nu există evaluări
- Chams 1Document78 paginiChams 1Das RavindraÎncă nu există evaluări
- Joan of Arc Inspiring Example Barbara BeckwithDocument4 paginiJoan of Arc Inspiring Example Barbara BeckwithraikibaÎncă nu există evaluări
- The Accounting Equation and Financial StatementsDocument30 paginiThe Accounting Equation and Financial StatementsAlya CandyÎncă nu există evaluări
- Player's Secrets of BinsadaDocument40 paginiPlayer's Secrets of BinsadaDark WolfÎncă nu există evaluări
- ZoroastrianismDocument13 paginiZoroastrianismDave Sarmiento ArroyoÎncă nu există evaluări
- Favoritism Bad Habbit of Some TeacherDocument2 paginiFavoritism Bad Habbit of Some TeacherQasim TapsiÎncă nu există evaluări
- Coso-Based Auditing Risk Assessment: - Next Slide, Please.Document11 paginiCoso-Based Auditing Risk Assessment: - Next Slide, Please.Ma. Fatima NisayÎncă nu există evaluări
- Black Sabbath - ParanoidDocument3 paginiBlack Sabbath - ParanoidmarcelofilgueirasÎncă nu există evaluări
- View ResultDocument1 paginăView ResultHarshal RahateÎncă nu există evaluări
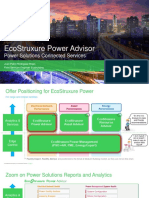
- EcoStruxure Power Advisor - TrainingDocument12 paginiEcoStruxure Power Advisor - TrainingFred Javier Melendez GarcíaÎncă nu există evaluări
- Days of Prayer and FastingDocument40 paginiDays of Prayer and FastingVictor saintÎncă nu există evaluări
- Future 100 2019Document237 paginiFuture 100 2019Maruam Samek100% (1)
- Astro-Diagnosis, A Guide To Healing, Chapters XXX - XXXIIIDocument14 paginiAstro-Diagnosis, A Guide To Healing, Chapters XXX - XXXIIIOmSilence2651100% (1)
- In Search of The Temples of YHWH of SamaDocument20 paginiIn Search of The Temples of YHWH of Samalgrozea2451Încă nu există evaluări
- Charles Schwab - SpeechDocument5 paginiCharles Schwab - SpeechvaluablenamesÎncă nu există evaluări
- Shiva Paradha Kshamapana StotramDocument7 paginiShiva Paradha Kshamapana StotrambondmumbaiÎncă nu există evaluări
- Educ2181 PP WeeblyDocument4 paginiEduc2181 PP Weeblyapi-363014935Încă nu există evaluări
- ME 457 Experimental Solid Mechanics (Lab) Torsion Test: Solid and Hollow ShaftsDocument5 paginiME 457 Experimental Solid Mechanics (Lab) Torsion Test: Solid and Hollow Shaftsanon-735529100% (2)
- UGC NET June 2012 NotificationDocument2 paginiUGC NET June 2012 Notificationsan2santoshÎncă nu există evaluări
- Test Bank For Essentials of Life Span Development 6th Edition John SantrockDocument60 paginiTest Bank For Essentials of Life Span Development 6th Edition John Santrockhanhvaleriefq7uÎncă nu există evaluări
- Raghavendra Letter To Judge Hon. PitmanDocument10 paginiRaghavendra Letter To Judge Hon. PitmanIvyGateÎncă nu există evaluări
- List of English Verbs in All TensesDocument33 paginiList of English Verbs in All TensesRamanÎncă nu există evaluări