S-ar putea să vă placă și
- Toptica AP 1012 Laser Locking 2009 05Document8 paginiToptica AP 1012 Laser Locking 2009 05Tushar GuptaÎncă nu există evaluări
- Chromatic Dispersion Measurement: The EXFO Phase Shift MethodDocument3 paginiChromatic Dispersion Measurement: The EXFO Phase Shift MethodahmedÎncă nu există evaluări
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsDe la EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsÎncă nu există evaluări
- Rise Time 3dB Bandwidth Relationship Lab FactDocument26 paginiRise Time 3dB Bandwidth Relationship Lab Factvotasugs756Încă nu există evaluări
- Learn Amateur Radio Electronics on Your SmartphoneDe la EverandLearn Amateur Radio Electronics on Your SmartphoneÎncă nu există evaluări
- Mkm1133 Instrumentation and Control SystemDocument19 paginiMkm1133 Instrumentation and Control SystemNurul Nadia Mohd ZawawiÎncă nu există evaluări
- Amateur Radio Electronics on Your MobileDe la EverandAmateur Radio Electronics on Your MobileEvaluare: 5 din 5 stele5/5 (1)
- Anote073 AngDocument2 paginiAnote073 AngsatavesÎncă nu există evaluări
- Chromatic Dispersion Analysis Methods: Francis Audet, Eng., Product ManagerDocument5 paginiChromatic Dispersion Analysis Methods: Francis Audet, Eng., Product Managerapi-19786391Încă nu există evaluări
- Ultrasonic Gas Flow Meter BasicsDocument7 paginiUltrasonic Gas Flow Meter BasicsMalouk CheniouniÎncă nu există evaluări
- PD Fault Location On Cable Lengths: Application NoteDocument17 paginiPD Fault Location On Cable Lengths: Application NoteInsan AzizÎncă nu există evaluări
- Order Tracking AnalysisDocument51 paginiOrder Tracking AnalysisWon-young SeoÎncă nu există evaluări
- Simple Methods ZCD PDFDocument5 paginiSimple Methods ZCD PDFPalhaço MalucoÎncă nu există evaluări
- Application of Wavelet Transform Technique For Extraction of Partial Discharge Signal in A TransformerDocument12 paginiApplication of Wavelet Transform Technique For Extraction of Partial Discharge Signal in A TransformerNguyen Quang ThangÎncă nu există evaluări
- Sampling Jitter in Audio A/D ConvertersDocument19 paginiSampling Jitter in Audio A/D ConvertersrenanzsÎncă nu există evaluări
- System1 Plots - Machinery-Diagnostic - Part1Document16 paginiSystem1 Plots - Machinery-Diagnostic - Part1Thyagaraju PalisettyÎncă nu există evaluări
- A Novel Method For Ultra-HighFrequency PD Loc in Power TF Using Particle Swarm Opt AlgoDocument14 paginiA Novel Method For Ultra-HighFrequency PD Loc in Power TF Using Particle Swarm Opt AlgoSwathiMuthyalaRamesh100% (1)
- Moving Target DetectorDocument3 paginiMoving Target DetectorAlexis ValverdeÎncă nu există evaluări
- Types of Errors in Sensors and TransducersDocument6 paginiTypes of Errors in Sensors and TransducersAnsh AroraÎncă nu există evaluări
- Range Finding Using Pulsed Lasers 10092004Document7 paginiRange Finding Using Pulsed Lasers 10092004Yash SiddharthaÎncă nu există evaluări
- Pluse Amplitude Modulation: AIM:-To Study The PAM Process and Its Waveforms. To Study The Demodulation ofDocument60 paginiPluse Amplitude Modulation: AIM:-To Study The PAM Process and Its Waveforms. To Study The Demodulation ofSrikanth GampalaÎncă nu există evaluări
- New Optimized Analysis Method For Measuring Extended Grounding SystemsDocument4 paginiNew Optimized Analysis Method For Measuring Extended Grounding SystemsKiriakos SiderakisÎncă nu există evaluări
- Bruel Kjaer TechnicalReview1996-2aDocument33 paginiBruel Kjaer TechnicalReview1996-2aRenzo ArangoÎncă nu există evaluări
- Identification of Torsional Vibration Features in Electrical Powered Rotating EquipmentDocument9 paginiIdentification of Torsional Vibration Features in Electrical Powered Rotating EquipmentHasan PashaÎncă nu există evaluări
- (1967) Digital Pulse Compression Radar ReceiverDocument9 pagini(1967) Digital Pulse Compression Radar ReceiverAlex YangÎncă nu există evaluări
- Communication System Lab Manual 123Document18 paginiCommunication System Lab Manual 123Dewan IqbalÎncă nu există evaluări
- Universal CounterDocument5 paginiUniversal CounterHimanshu NegiÎncă nu există evaluări
- SFRA Method Analysis Detects Transformer Winding IssuesDocument4 paginiSFRA Method Analysis Detects Transformer Winding IssuesNirmal mehtaÎncă nu există evaluări
- Radar Tech Training IOM-88 Module-CDocument55 paginiRadar Tech Training IOM-88 Module-CDedi KusnadiÎncă nu există evaluări
- Ultrasonic Gas Meters Handbook - InstrometDocument24 paginiUltrasonic Gas Meters Handbook - InstrometDian L.Încă nu există evaluări
- Pulse-Amplitude Modulation ExplainedDocument6 paginiPulse-Amplitude Modulation ExplainedSuresh JKÎncă nu există evaluări
- EXP 8 - Time Division Multiplexing & De-Multiplexing (TDM) PDFDocument8 paginiEXP 8 - Time Division Multiplexing & De-Multiplexing (TDM) PDFYerneni SasankÎncă nu există evaluări
- Capgo - Vibration MonitoringDocument3 paginiCapgo - Vibration MonitoringSufean SakinÎncă nu există evaluări
- Delay Line CancelerDocument41 paginiDelay Line Cancelergzb012Încă nu există evaluări
- Resolución, Precisión y CalibracionDocument10 paginiResolución, Precisión y CalibracionWoodrow FoxÎncă nu există evaluări
- 5990 7531enDocument6 pagini5990 7531enArash MazandaraniÎncă nu există evaluări
- Merical Met Od For Transit 'Fimc MeasurementDocument6 paginiMerical Met Od For Transit 'Fimc Measurementemild_03Încă nu există evaluări
- I.seker - Calibration Methods For Phased Array RadarsDocument16 paginiI.seker - Calibration Methods For Phased Array RadarsAlex YangÎncă nu există evaluări
- Online Documentation For Altium Products - ( (High Speed Design in Altium Designer) ) - AD - 2018-10-26Document27 paginiOnline Documentation For Altium Products - ( (High Speed Design in Altium Designer) ) - AD - 2018-10-26Marco I100% (1)
- Multipath Cross-Correlation Flowmeters: V. Skwarek and V. HansDocument6 paginiMultipath Cross-Correlation Flowmeters: V. Skwarek and V. HansriannataÎncă nu există evaluări
- Processor Setting FundamentalsDocument14 paginiProcessor Setting Fundamentalsta dang hung100% (1)
- Geljon, SBMicro09 PDFDocument8 paginiGeljon, SBMicro09 PDFKumar RaviÎncă nu există evaluări
- Enhanced Modelling and Early Detection oDocument8 paginiEnhanced Modelling and Early Detection oDalal HelmiÎncă nu există evaluări
- Anote073-Ang OTDRDocument3 paginiAnote073-Ang OTDRapi-19786391Încă nu există evaluări
- 03 ProcessedDocument68 pagini03 ProcessedGiroro TzangÎncă nu există evaluări
- ECE3202 ch4Document12 paginiECE3202 ch4Temesgen workiyeÎncă nu există evaluări
- Modeling and Analysis of Inter Turn Fault of Power TransformerDocument7 paginiModeling and Analysis of Inter Turn Fault of Power Transformerwww.irjes.comÎncă nu există evaluări
- Pico Second Labs PDFDocument5 paginiPico Second Labs PDFVenkatesh KarriÎncă nu există evaluări
- Lab Manual CorrectDocument9 paginiLab Manual CorrectDewan IqbalÎncă nu există evaluări
- Vibration Signal Processing for Effective Machinery AnalysisDocument11 paginiVibration Signal Processing for Effective Machinery AnalysisMario Alfonso Zaragoza ZuñigaÎncă nu există evaluări
- Advanced USM Diagnostics TechWpaperDocument12 paginiAdvanced USM Diagnostics TechWpaperRuben Ortiz CaramÎncă nu există evaluări
- Rodriguez PogiDocument6 paginiRodriguez PogiRodel Ludwig RodriguezÎncă nu există evaluări
- TWS Sec - JDocument45 paginiTWS Sec - JWilmer Huaman PasaperaÎncă nu există evaluări
- S A A O N I S C A C: Imulation ND Nalysis F Oise N Witched Apacitor Mplifier IrcuitsDocument4 paginiS A A O N I S C A C: Imulation ND Nalysis F Oise N Witched Apacitor Mplifier IrcuitsSai KrishnaÎncă nu există evaluări
- ZCDDocument5 paginiZCDotavioalcaldeÎncă nu există evaluări
- Channel Sounding: HZ) - The Signal IsDocument14 paginiChannel Sounding: HZ) - The Signal IsersinÎncă nu există evaluări
- ECE 3202 ch3Document13 paginiECE 3202 ch3fikaduÎncă nu există evaluări
- Understanding Optical Time-Domain Reflectometers (OTDR) in 40 CharactersDocument3 paginiUnderstanding Optical Time-Domain Reflectometers (OTDR) in 40 CharactersBiju KmÎncă nu există evaluări
- Installation Guide for the Nikrans LCD-300GD Phone Signal BoosterDocument21 paginiInstallation Guide for the Nikrans LCD-300GD Phone Signal BoosterGHOST RIDERÎncă nu există evaluări
- AGC Marketing Price List Valid Until December 2011Document36 paginiAGC Marketing Price List Valid Until December 2011ferdinandz_010Încă nu există evaluări
- Rssi - AgcDocument16 paginiRssi - AgcRavi KumarÎncă nu există evaluări
- AC Lab Manual For EceDocument55 paginiAC Lab Manual For EceV SATYA KISHORE100% (1)
- Principles of Seismic Data Processing: M.M.BadawyDocument66 paginiPrinciples of Seismic Data Processing: M.M.BadawyGhassen LaouiniÎncă nu există evaluări
- 15-W Class-D Audio AmpDocument18 pagini15-W Class-D Audio AmpseborgÎncă nu există evaluări
- CCTV Ch1 CamerasDocument68 paginiCCTV Ch1 CamerasmksayshiÎncă nu există evaluări
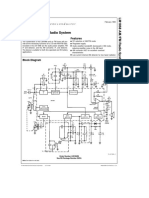
- LM1868 AM/FM Radio System: General Description FeaturesDocument12 paginiLM1868 AM/FM Radio System: General Description Featuresvali dÎncă nu există evaluări
- C6U Commander 6® UpconverferDocument50 paginiC6U Commander 6® UpconverferHenry Capacho100% (1)
- Television EngineeringDocument19 paginiTelevision Engineeringvivek186Încă nu există evaluări
- 88C46-D PR DS PRO-port-1 Pro5150Document108 pagini88C46-D PR DS PRO-port-1 Pro5150Daniel Lazo PallautaÎncă nu există evaluări
- TDA1072ADocument20 paginiTDA1072AUbiracy ZanetiÎncă nu există evaluări
- Omnia Enterprise 9s BrochureDocument6 paginiOmnia Enterprise 9s BrochureandrecaproniÎncă nu există evaluări
- Overview of The Project: A New Noise Blanker For The Drake R-4CDocument7 paginiOverview of The Project: A New Noise Blanker For The Drake R-4CDocBellowsÎncă nu există evaluări
- AGC 3&4&200 Serise Single Gen-Set Application With Deif Template 20.12.2012Document26 paginiAGC 3&4&200 Serise Single Gen-Set Application With Deif Template 20.12.2012Dominic DomÎncă nu există evaluări
- ITT Mackay Instruction Manual For Model 3030A-3030AR Synthesized Receiver Issue 3 June 1982Document104 paginiITT Mackay Instruction Manual For Model 3030A-3030AR Synthesized Receiver Issue 3 June 1982Bob Laughlin, KWØRL100% (1)
- Bush Btv17 Goodmans Gtv371vcrDocument37 paginiBush Btv17 Goodmans Gtv371vcrangusmecoatupÎncă nu există evaluări
- ICOM IC-7700 BrochureDocument12 paginiICOM IC-7700 Brochuregus289Încă nu există evaluări
- SonarWiz SBP GuideDocument29 paginiSonarWiz SBP GuideArga TyoÎncă nu există evaluări
- Designer's Guide to AGC Automatic Gen-set ControllerDocument168 paginiDesigner's Guide to AGC Automatic Gen-set ControllervassindouÎncă nu există evaluări
- Rev ADocument5 paginiRev Ajesus mayorgaÎncă nu există evaluări
- UTC1018Document8 paginiUTC1018tangbunnaÎncă nu există evaluări
- Automatic Gain ControlDocument2 paginiAutomatic Gain ControlidatscribdÎncă nu există evaluări
- TDA8366Document48 paginiTDA8366Rigoberto Martinez LopezÎncă nu există evaluări
- Operating Manual S4100 6175472502 01 00 Man 3 enDocument706 paginiOperating Manual S4100 6175472502 01 00 Man 3 enTeknik Telpen50% (2)
- X1M Agc ManualDocument7 paginiX1M Agc ManualapsÎncă nu există evaluări
- 8382 1.1.0 Operating Manual Rev 02Document244 pagini8382 1.1.0 Operating Manual Rev 02Felix Manuel CordovaÎncă nu există evaluări
- 11AK33Document35 pagini11AK33Umut ErdenayÎncă nu există evaluări
- Lab Activity No. 7 - Tuned Amplifiers With Gain ControlDocument14 paginiLab Activity No. 7 - Tuned Amplifiers With Gain ControlDavy JonesÎncă nu există evaluări
- 3V Monaural Radio IC: FeaturesDocument11 pagini3V Monaural Radio IC: FeaturesMihai AlexandruÎncă nu există evaluări