S-ar putea să vă placă și
- C# DevelopmentDocument191 paginiC# Developmentleneneck9057100% (4)
- Chapter 3. Drag Force and Its CoefficientDocument47 paginiChapter 3. Drag Force and Its Coefficientsmyeganeh100% (1)
- Manual on Implementation of 300m Vertical Separation FL 290-410Document44 paginiManual on Implementation of 300m Vertical Separation FL 290-410Mauro SolorzanoÎncă nu există evaluări
- PHYSICS Engineering (BTech/BE) 1st First Year Notes, Books, Ebook - Free PDF DownloadDocument205 paginiPHYSICS Engineering (BTech/BE) 1st First Year Notes, Books, Ebook - Free PDF DownloadVinnie Singh100% (2)
- Airplane Performance Range and EnduranceDocument45 paginiAirplane Performance Range and Endurancearun2386Încă nu există evaluări
- Magical Student Character Creation GuideDocument20 paginiMagical Student Character Creation Guidekeglon002Încă nu există evaluări
- EMB 500 OEB Report FinalDocument39 paginiEMB 500 OEB Report Finalthefirst_thefirstÎncă nu există evaluări
- Concrete Pavement Backcalculation Uing ILLI-BACK 3.0Document22 paginiConcrete Pavement Backcalculation Uing ILLI-BACK 3.0Sri Ramya100% (1)
- Basic Autopilot SystemsDocument4 paginiBasic Autopilot SystemsSonali Srivastava100% (1)
- Pilot Induced Oscillations Human Dynamic BehaviorDocument106 paginiPilot Induced Oscillations Human Dynamic BehaviorAdrian ToaderÎncă nu există evaluări
- EnrouteDocument582 paginiEnrouteRichard TysonÎncă nu există evaluări
- NR - Numerical Model of Single Main Rotor Helicopter DynamicsDocument10 paginiNR - Numerical Model of Single Main Rotor Helicopter DynamicsHossam T BadranÎncă nu există evaluări
- Fighters Feature Electronic Attack: AESA Radars and UpgradesDocument4 paginiFighters Feature Electronic Attack: AESA Radars and Upgradesslicendice123Încă nu există evaluări
- AircraftDocument202 paginiAircraftJohn Adrian RoceroÎncă nu există evaluări
- AE332 Initial SizingDocument54 paginiAE332 Initial SizingKumarGuglothÎncă nu există evaluări
- Guidance AlgorithmsDocument12 paginiGuidance Algorithmsanil2383100% (1)
- Regular Expressions Cheat SheetDocument2 paginiRegular Expressions Cheat Sheettibork1Încă nu există evaluări
- Methods of Radar Cross-section AnalysisDe la EverandMethods of Radar Cross-section AnalysisJ.W. Jr. CrispinÎncă nu există evaluări
- AeroBasics PDFDocument44 paginiAeroBasics PDFShirat MohsinÎncă nu există evaluări
- Tool Radius Compensation For 5-Axis Machining SpecificationsDocument61 paginiTool Radius Compensation For 5-Axis Machining SpecificationsmikeÎncă nu există evaluări
- Airworthiness Approval of Systems for Low-Visibility Takeoff, Approach, Landing & RolloutDocument136 paginiAirworthiness Approval of Systems for Low-Visibility Takeoff, Approach, Landing & RolloutrdpereirÎncă nu există evaluări
- Comparing Aircraft Design SpecificationsDocument38 paginiComparing Aircraft Design SpecificationsKapil mÎncă nu există evaluări
- Electe: S. Schallhorn, K. Daill, W.B. CushmanDocument20 paginiElecte: S. Schallhorn, K. Daill, W.B. CushmanORLANDO CASTILLOÎncă nu există evaluări
- Mil HDBK 1763Document221 paginiMil HDBK 1763wjsgudrms100% (1)
- AIRPLANE PERFORMANCE AT ACCELERATED FLIGHTDocument64 paginiAIRPLANE PERFORMANCE AT ACCELERATED FLIGHTJose A Rosado LopezÎncă nu există evaluări
- Flight Test PDFDocument9 paginiFlight Test PDFyh1.yuÎncă nu există evaluări
- Mettler Bernard 2000 1Document25 paginiMettler Bernard 2000 1sanjesh100% (1)
- Direct and Inverse ProportionDocument21 paginiDirect and Inverse ProportionCatalin ChiriloiÎncă nu există evaluări
- Educational Analog Computer EC1-OPDocument40 paginiEducational Analog Computer EC1-OPleneneck9057Încă nu există evaluări
- Vibration Analysis of The ANSPS-67 (V) 3 Surface Search Radar PDFDocument141 paginiVibration Analysis of The ANSPS-67 (V) 3 Surface Search Radar PDFFernando Raúl LADINOÎncă nu există evaluări
- USAF Stability and Control Digital Datcom Users ManualDocument149 paginiUSAF Stability and Control Digital Datcom Users Manualhraza7048Încă nu există evaluări
- TCAS1Document14 paginiTCAS1borku100% (1)
- Flutter TestingDocument16 paginiFlutter TestingMarius Olenici100% (2)
- Autopilot HistoryDocument20 paginiAutopilot HistoryKamesh PrasadÎncă nu există evaluări
- Terrain Following RadarDocument3 paginiTerrain Following RadarYaSir JuTtÎncă nu există evaluări
- Instrumentation For Flight TestingDocument17 paginiInstrumentation For Flight TestingNambi RajanÎncă nu există evaluări
- Some Flight Characteristics of A Deflected Slipstream V-Stol Aircraft 19630008786 - 1963008786 PDFDocument38 paginiSome Flight Characteristics of A Deflected Slipstream V-Stol Aircraft 19630008786 - 1963008786 PDFSergiy_KirÎncă nu există evaluări
- Introduction To Flight Test Engineering: Dan HrehovDocument30 paginiIntroduction To Flight Test Engineering: Dan HrehovmsrajuÎncă nu există evaluări
- Preliminary Design and Development of Small Class UAV For Testing of Different Payloads and SensorsDocument6 paginiPreliminary Design and Development of Small Class UAV For Testing of Different Payloads and SensorsAlg PRasadÎncă nu există evaluări
- TU Delft - Spacecraft (SC) Preliminary Mass Estimation & AllocationDocument5 paginiTU Delft - Spacecraft (SC) Preliminary Mass Estimation & AllocationRavi KiranÎncă nu există evaluări
- Aircraft Flight Control System ModellingDocument10 paginiAircraft Flight Control System ModellingMahmoudÎncă nu există evaluări
- Tu Delft Aircraft Performance Syllabus Dec 2016Document9 paginiTu Delft Aircraft Performance Syllabus Dec 2016chhetribharat08Încă nu există evaluări
- FairchildDocument53 paginiFairchildelisacontrerasÎncă nu există evaluări
- Joined-Wing Aircraft Design and OptimizationDocument11 paginiJoined-Wing Aircraft Design and OptimizationAli YıldırımÎncă nu există evaluări
- Introduction To Aerial Vehicle Flight Mechanics, Stability and Control - CranfieldDocument14 paginiIntroduction To Aerial Vehicle Flight Mechanics, Stability and Control - Cranfielddaus100% (1)
- Aerodynamic Features of A Coaxial Rotor HelicopterDocument19 paginiAerodynamic Features of A Coaxial Rotor HelicopterThomas MouraÎncă nu există evaluări
- Gpws ModesDocument10 paginiGpws Modesjay_sidÎncă nu există evaluări
- Displays Tech Advances HUD HMDDocument31 paginiDisplays Tech Advances HUD HMDHthrw HrehrÎncă nu există evaluări
- Automatic Landing SystemsDocument8 paginiAutomatic Landing SystemsKoustubh VadalkarÎncă nu există evaluări
- FLIGHT DYNAMICS EXAM RESULTSDocument9 paginiFLIGHT DYNAMICS EXAM RESULTSAkshay KulkarniÎncă nu există evaluări
- Aerodynamic stability derivatives for aircraft roll and yawDocument3 paginiAerodynamic stability derivatives for aircraft roll and yawGurunath AeroÎncă nu există evaluări
- Design of A Biplane Wing For Small-Scale Aircraft: The Pennsylvania State University, University Park, PA, 16802Document10 paginiDesign of A Biplane Wing For Small-Scale Aircraft: The Pennsylvania State University, University Park, PA, 16802Anonymous qTKCWlxÎncă nu există evaluări
- Flight Test #3 ReportDocument30 paginiFlight Test #3 ReportBsharrell100% (1)
- FS2004 - The Aircraft - CFG FileDocument5 paginiFS2004 - The Aircraft - CFG FiletumbÎncă nu există evaluări
- Chapter 3. Drag Force and Its Coefficient - noPW PDFDocument5 paginiChapter 3. Drag Force and Its Coefficient - noPW PDFashoku2Încă nu există evaluări
- CalSpan Upset Recovery TrainingDocument2 paginiCalSpan Upset Recovery TrainingHighspeed FlyboyÎncă nu există evaluări
- Datcom ManualDocument147 paginiDatcom Manualmaria4nowÎncă nu există evaluări
- Primary Flight Display Pilot's Guide, AvadyneDocument60 paginiPrimary Flight Display Pilot's Guide, AvadyneStephenStoller100% (1)
- AIP Somali Part One (1) En-RouteDocument80 paginiAIP Somali Part One (1) En-RouteabdirahmanÎncă nu există evaluări
- Stability of A JetstreamDocument9 paginiStability of A JetstreamNahid Latona100% (1)
- Precision Approach and Landing SystemsDocument50 paginiPrecision Approach and Landing SystemsshotguntigerÎncă nu există evaluări
- Aerodynamic Sections: (An Introduction Based On NACA Airfoils)Document16 paginiAerodynamic Sections: (An Introduction Based On NACA Airfoils)jvila31Încă nu există evaluări
- RVSMVDocument40 paginiRVSMVDharavGosaliaÎncă nu există evaluări
- Advances in Aeronautical Sciences: Proceedings of the First International Congress in the Aeronautical Sciences, Madrid, 8-13 September 1958De la EverandAdvances in Aeronautical Sciences: Proceedings of the First International Congress in the Aeronautical Sciences, Madrid, 8-13 September 1958Th. Von KármánÎncă nu există evaluări
- Stabilization and Dynamic of Premixed Swirling Flames: Prevaporized, Stratified, Partially, and Fully Premixed RegimesDe la EverandStabilization and Dynamic of Premixed Swirling Flames: Prevaporized, Stratified, Partially, and Fully Premixed RegimesÎncă nu există evaluări
- Class A Bézier CurvesDocument9 paginiClass A Bézier Curvesleneneck9057Încă nu există evaluări
- Samsung SD CardDocument31 paginiSamsung SD Cardleneneck9057Încă nu există evaluări
- Solid Statements - SSRs Vs EMRsDocument5 paginiSolid Statements - SSRs Vs EMRsleneneck9057Încă nu există evaluări
- Fitting Parametric Curves To Dense and Noisy PointsDocument10 paginiFitting Parametric Curves To Dense and Noisy Pointsleneneck9057Încă nu există evaluări
- RaspiCam DocumentationDocument18 paginiRaspiCam Documentationleneneck9057Încă nu există evaluări
- 8 I 20 ManDocument39 pagini8 I 20 Manleneneck9057Încă nu există evaluări
- RaspiCam DocumentationDocument18 paginiRaspiCam Documentationleneneck9057Încă nu există evaluări
- 9512Document51 pagini9512RussoÎncă nu există evaluări
- NX8 User Defined FeaturesDocument3 paginiNX8 User Defined Featuresleneneck9057Încă nu există evaluări
- Rprpmfinal PDFDocument50 paginiRprpmfinal PDFrelampioÎncă nu există evaluări
- Whats New in Siemens NX 8Document9 paginiWhats New in Siemens NX 8leneneck9057Încă nu există evaluări
- GenRad Experimenter Dec 1963Document16 paginiGenRad Experimenter Dec 1963leneneck9057Încă nu există evaluări
- Guia Caja A - Dta800b1 - RcaDocument32 paginiGuia Caja A - Dta800b1 - Rcajose_interÎncă nu există evaluări
- Dell-2408wfp User's GuideDocument41 paginiDell-2408wfp User's Guideleneneck9057Încă nu există evaluări
- Picking Perfect WorkstationDocument5 paginiPicking Perfect Workstationleneneck9057Încă nu există evaluări
- Total Innovation in England GovernmentDocument104 paginiTotal Innovation in England GovernmentRupee Rudolf Lucy HaÎncă nu există evaluări
- Single Page Integral Table PDFDocument2 paginiSingle Page Integral Table PDFMehmet Helva100% (2)
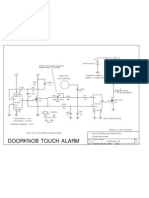
- Doorknob Touch AlarmDocument1 paginăDoorknob Touch AlarmBien MorfeÎncă nu există evaluări
- PIDDocument7 paginiPIDGanti1977Încă nu există evaluări
- UT Dallas Syllabus For Math1326.502.07s Taught by Raj Seekri (Seekri)Document5 paginiUT Dallas Syllabus For Math1326.502.07s Taught by Raj Seekri (Seekri)UT Dallas Provost's Technology GroupÎncă nu există evaluări
- Visit TutorialDocument83 paginiVisit Tutorialfab1991Încă nu există evaluări
- Numerical Solution To The Inverse Weir ProblemDocument14 paginiNumerical Solution To The Inverse Weir ProblemBenjamín Andres Lagos BerriosÎncă nu există evaluări
- Measuring and Modeling The Fatigue Performance of Elastomers For Applications With Complex Loading RequirementsDocument24 paginiMeasuring and Modeling The Fatigue Performance of Elastomers For Applications With Complex Loading RequirementssanthoshnlÎncă nu există evaluări
- Fake Reviews Detection Based On LDA: Shaohua Jia Xianguo Zhang, Xinyue Wang, Yang LiuDocument4 paginiFake Reviews Detection Based On LDA: Shaohua Jia Xianguo Zhang, Xinyue Wang, Yang LiuVivek AnandÎncă nu există evaluări
- Bayes' TheoremDocument2 paginiBayes' TheoremSanjay TiwariÎncă nu există evaluări
- Stacks and QueuesDocument21 paginiStacks and QueuesDhivya NÎncă nu există evaluări
- Unit 1 SFEE EXERCISE PROBLEMSDocument2 paginiUnit 1 SFEE EXERCISE PROBLEMSBalasubramani Srinivasan100% (1)
- MAFE208IU-L7 InterpolationDocument35 paginiMAFE208IU-L7 InterpolationThy VũÎncă nu există evaluări
- Altair's Student Guides - Instructor's Manual - CAE and Multi Body DynamicsDocument18 paginiAltair's Student Guides - Instructor's Manual - CAE and Multi Body DynamicsKFourMetrics100% (5)
- Alindogan - Matlab Activity 4-2 - 2062362647Document7 paginiAlindogan - Matlab Activity 4-2 - 2062362647Theresa BernasolÎncă nu există evaluări
- A Novel and Systematic Implementation of Thermometer-Coded Current-Mode DACDocument4 paginiA Novel and Systematic Implementation of Thermometer-Coded Current-Mode DACRodrigo SantosÎncă nu există evaluări
- Algebraic Factorization and Remainder TheoremsDocument5 paginiAlgebraic Factorization and Remainder TheoremsNisheli Amani PereraÎncă nu există evaluări
- 3021 - 07 Predetermined Time SystemsDocument37 pagini3021 - 07 Predetermined Time Systemssunilkjain6105100% (1)
- ME Course Content Guide for AY2011/2012 IntakeDocument4 paginiME Course Content Guide for AY2011/2012 IntakedavidwongbxÎncă nu există evaluări
- Green FunctionDocument15 paginiGreen Functionjitendra25252Încă nu există evaluări
- Net Iq Portion (Part-8)Document35 paginiNet Iq Portion (Part-8)Sana AftabÎncă nu există evaluări
- Best Approach: Trigonometry Equation (Phase - II)Document35 paginiBest Approach: Trigonometry Equation (Phase - II)Ishhu100% (1)
- Ssim MaterialDocument34 paginiSsim Materialsukumar sukuÎncă nu există evaluări
- Inde 2156 HW 2Document6 paginiInde 2156 HW 2Emre ParlakÎncă nu există evaluări
- Determine regulation and efficiency of transformer using OC and SC testsDocument45 paginiDetermine regulation and efficiency of transformer using OC and SC testsrkadiraj701150% (4)
- Modal Space - in Our Own Little World: by Pete AvitabileDocument2 paginiModal Space - in Our Own Little World: by Pete AvitabileLuigi1721Încă nu există evaluări
- Trig Ratios of Special AnglesDocument25 paginiTrig Ratios of Special AnglesMary Ann CrizaldoÎncă nu există evaluări
- Breakthrough analysis of SO2 adsorption over zeolitesDocument14 paginiBreakthrough analysis of SO2 adsorption over zeoliteskayeÎncă nu există evaluări
- Combine ResultDocument12 paginiCombine Resultpreeti.2405Încă nu există evaluări