S-ar putea să vă placă și
- Cuestionario (Repaso Prueba)Document3 paginiCuestionario (Repaso Prueba)Bruno Demmian Cabrera LetzkusÎncă nu există evaluări
- Dvce 0001 PDFDocument9 paginiDvce 0001 PDFBruno Demmian Cabrera LetzkusÎncă nu există evaluări
- Plan de Salud Cruz Blanca PDFDocument2 paginiPlan de Salud Cruz Blanca PDFBruno Demmian Cabrera LetzkusÎncă nu există evaluări
- 8BK20 Catalogo ARGDocument0 pagini8BK20 Catalogo ARGBruno Demmian Cabrera LetzkusÎncă nu există evaluări
- COMPRESORES de AIRE Fundamento Mecanico - Docx 1Document20 paginiCOMPRESORES de AIRE Fundamento Mecanico - Docx 1alex100% (1)
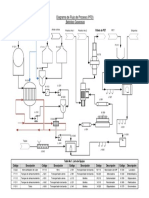
- Diagrama Bebidas GaseosasDocument1 paginăDiagrama Bebidas GaseosasJorgeÎncă nu există evaluări
- Blog Diagnostico FinancieroDocument3 paginiBlog Diagnostico FinancieroLucas MolinaÎncă nu există evaluări
- Sistemas de Potencia Apuntes IngeneiraDocument28 paginiSistemas de Potencia Apuntes IngeneiraFabian MartinezÎncă nu există evaluări
- Semana 8 Luis SalazarDocument4 paginiSemana 8 Luis SalazarSherity Maffet González100% (1)
- Nivel Socioeconómico y LenguajeDocument7 paginiNivel Socioeconómico y LenguajeSole SoleÎncă nu există evaluări
- Guía N°3 Conjuntos Numéricos y #Enteros-4to Medio-135 CopiasDocument4 paginiGuía N°3 Conjuntos Numéricos y #Enteros-4to Medio-135 CopiasalberÎncă nu există evaluări
- Infografia EstimulacionDocument1 paginăInfografia EstimulacionJuan Camilo Parra ReyesÎncă nu există evaluări
- Syllabus Calidad en La Construcción IIDocument3 paginiSyllabus Calidad en La Construcción IIxxx08xxxÎncă nu există evaluări
- Consentimiento InformadoDocument1 paginăConsentimiento InformadoKarina Chavez VargasÎncă nu există evaluări
- Biologia y Geologia 1BTODocument34 paginiBiologia y Geologia 1BTOPaauuliitaaÎncă nu există evaluări
- Gestión Básica de Almacenamiento IIIDocument34 paginiGestión Básica de Almacenamiento IIIGabrielaRodríguezVelardedeBayaÎncă nu există evaluări
- Evaluación de EntradaDocument3 paginiEvaluación de EntradaAlex Tinoco100% (1)
- Pregunta1 13Document7 paginiPregunta1 13Escobar Gabidia PragaÎncă nu există evaluări
- Fracturas Causales y La ConcausaDocument2 paginiFracturas Causales y La ConcausaAlipio Chanca Coquil100% (1)
- ImpactDocument2 paginiImpactHenry Castillo HidalgoÎncă nu există evaluări
- Ap1618 2014 (41069)Document23 paginiAp1618 2014 (41069)Karolr04Încă nu există evaluări
- Mapa Mental Entrevista Orientación EducativaDocument1 paginăMapa Mental Entrevista Orientación EducativaKatya Ivonne Rivera MartinezÎncă nu există evaluări
- Clases de Sucesiones - Benjamín Aguilar .OcrDocument15 paginiClases de Sucesiones - Benjamín Aguilar .OcrAnita GeraldineÎncă nu există evaluări
- Preguntas Cap 11Document5 paginiPreguntas Cap 11Claudia CastilloÎncă nu există evaluări
- Letra JDocument2 paginiLetra JFabricia HdezÎncă nu există evaluări
- Cultivo Del Plátano en Altas DensidadesDocument3 paginiCultivo Del Plátano en Altas DensidadesJuan José Flores Huaña100% (1)
- Buyer PersonaDocument11 paginiBuyer PersonaKAREN IVANIA YANES HERNANDEZÎncă nu există evaluări
- Proyecto Azotea Verde - Oscar Monroy Olguín - CTB Tecnología en Ambiente y AguaDocument44 paginiProyecto Azotea Verde - Oscar Monroy Olguín - CTB Tecnología en Ambiente y AguaOscarÎncă nu există evaluări
- Plan de Área Inglés Grado 8°Document1 paginăPlan de Área Inglés Grado 8°Diana Alejandra Sanchez PeraltaÎncă nu există evaluări
- Caso Worlwide Chemical CompanyDocument2 paginiCaso Worlwide Chemical CompanyLucho DomínguezÎncă nu există evaluări
- Lineas Clase3Document35 paginiLineas Clase3eliza24pimentel4727100% (3)
- Presupuesto MaestroDocument28 paginiPresupuesto MaestroJose Miguel Serrano Mariño0% (1)
- Unidad IV Edo. Liquido 2. DisolucionesDocument21 paginiUnidad IV Edo. Liquido 2. Disolucioneskeisner_11Încă nu există evaluări
- Unzen - JNTO Oficina Nacional Del Turismo JaponésDocument2 paginiUnzen - JNTO Oficina Nacional Del Turismo JaponésPablo AbilaÎncă nu există evaluări