S-ar putea să vă placă și
- Roto Fix 32 Service ManualDocument31 paginiRoto Fix 32 Service Manualperla_canto_150% (2)
- 2019 Auto Truck Key Blank Reference PDFDocument188 pagini2019 Auto Truck Key Blank Reference PDFAlbert RodaÎncă nu există evaluări
- FenwalNET6000 (Dec 2004)Document210 paginiFenwalNET6000 (Dec 2004)Andrew Panjaitan100% (2)
- Axor Drive Service ManualDocument68 paginiAxor Drive Service Manualkratmel100% (2)
- BFT LIBRA Control PanelDocument10 paginiBFT LIBRA Control PanelAADAFFAFASASÎncă nu există evaluări
- VOLVO 7748542 - US - Installation EMS 2 - D13Document62 paginiVOLVO 7748542 - US - Installation EMS 2 - D13Cui100% (4)
- Industrial Applications of Infrared Thermography: How Infrared Analysis Can be Used to Improve Equipment InspectionDe la EverandIndustrial Applications of Infrared Thermography: How Infrared Analysis Can be Used to Improve Equipment InspectionEvaluare: 4.5 din 5 stele4.5/5 (3)
- Porifera and CnidariaDocument16 paginiPorifera and CnidariaMichaelÎncă nu există evaluări
- The Role of IT in TQM L'Oreal Case StudyDocument9 paginiThe Role of IT in TQM L'Oreal Case StudyUdrea RoxanaÎncă nu există evaluări
- Lenze ESMD 230VDocument23 paginiLenze ESMD 230VNenad MarticÎncă nu există evaluări
- Lenze SMD Basic IO ManualDocument20 paginiLenze SMD Basic IO Manualbarny55Încă nu există evaluări
- Lenze SMD Basic Io ManualDocument20 paginiLenze SMD Basic Io ManualDaneeÎncă nu există evaluări
- Driver Ondal (Lenze)Document20 paginiDriver Ondal (Lenze)manu0708Încă nu există evaluări
- Instrucciones de Funcionamiento: 0.37 KW 22 KWDocument26 paginiInstrucciones de Funcionamiento: 0.37 KW 22 KWrhymebusÎncă nu există evaluări
- Instructiuni de Operare LenzeDocument24 paginiInstructiuni de Operare Lenzelin2m3Încă nu există evaluări
- 8200 Vector: Information For The Operator of The MachineDocument25 pagini8200 Vector: Information For The Operator of The MachineRoberto De Leon MartinezÎncă nu există evaluări
- SMD ManualDocument8 paginiSMD ManualJose K ManadanÎncă nu există evaluări
- Lenze 8200 Vector-25Document25 paginiLenze 8200 Vector-25poaguiÎncă nu există evaluări
- Nordac Vector MC PDFDocument64 paginiNordac Vector MC PDFTonino08Încă nu există evaluări
- LV7000 - Manual (Ud701s) - 310507 PDFDocument104 paginiLV7000 - Manual (Ud701s) - 310507 PDFSidnei PereiraÎncă nu există evaluări
- I62e l7 Getting Started Guide enDocument34 paginiI62e l7 Getting Started Guide enمحمد الليثىÎncă nu există evaluări
- 9300vector 0,37-90kW v3-0 ENDocument458 pagini9300vector 0,37-90kW v3-0 ENGuilhermeCuninghanÎncă nu există evaluări
- Bu6010 GB 0300Document44 paginiBu6010 GB 0300Kadirou BigstarÎncă nu există evaluări
- Inversor MoellerDocument45 paginiInversor MoellerElderÎncă nu există evaluări
- SRALDocument484 paginiSRALAnonymous smdEgZN2IeÎncă nu există evaluări
- ServoStar CD - Hardware Installation ManualDocument118 paginiServoStar CD - Hardware Installation Manualyonan RodriguezÎncă nu există evaluări
- Siemens - MicromasterDocument49 paginiSiemens - MicromasterMartín M. SaldiviaÎncă nu există evaluări
- Flux Vector Drive 0.25 Kw... 2.2 KW: Betriebsanleitung DE Operating InstructionsDocument124 paginiFlux Vector Drive 0.25 Kw... 2.2 KW: Betriebsanleitung DE Operating InstructionsDaniel SitumeangÎncă nu există evaluări
- Lenze SX03Document112 paginiLenze SX03Michael CevallosÎncă nu există evaluări
- CSC-122M Numerical Bus Coupler Protection EquipmentDocument47 paginiCSC-122M Numerical Bus Coupler Protection EquipmentMarkusKunÎncă nu există evaluări
- York Max-E Model YRDocument168 paginiYork Max-E Model YRmarco_christoforidis100% (5)
- Compound ManualDocument28 paginiCompound ManualoveladoÎncă nu există evaluări
- Modbus RTU PDFDocument39 paginiModbus RTU PDFVinny TukÎncă nu există evaluări
- NXT4 Bia e 1Document24 paginiNXT4 Bia e 1Felipe AchurraÎncă nu există evaluări
- Frequency Inverter LenzeDocument116 paginiFrequency Inverter LenzeHector AraujoÎncă nu există evaluări
- Instruction Manual: Electromagnetic FlowmetersDocument32 paginiInstruction Manual: Electromagnetic FlowmetersAbdul MajeedÎncă nu există evaluări
- Inversor Moeller DF4Document95 paginiInversor Moeller DF4Flavio CasimiroÎncă nu există evaluări
- Nord SK 500E DeviceNet ManualDocument48 paginiNord SK 500E DeviceNet ManualNabeel MohammedÎncă nu există evaluări
- Moller PDFDocument132 paginiMoller PDFMizael MerinoÎncă nu există evaluări
- HA470388U003Document520 paginiHA470388U003FadFadÎncă nu există evaluări
- Nord SK 200E Inverter ManualDocument265 paginiNord SK 200E Inverter ManualStevenÎncă nu există evaluări
- Digistart STV 2313: Electronic Soft StarterDocument40 paginiDigistart STV 2313: Electronic Soft StarterIzzHyukÎncă nu există evaluări
- Comander SE PDFDocument76 paginiComander SE PDFPurwogus RyantoÎncă nu există evaluări
- SEW MOVITRAC 31C ManualDocument65 paginiSEW MOVITRAC 31C ManualArun kumar100% (1)
- Eng Ezm-4931 02 v03 05 - 16Document55 paginiEng Ezm-4931 02 v03 05 - 16Mithun KumarÎncă nu există evaluări
- Servostar CD Install PDFDocument118 paginiServostar CD Install PDFFabianLopezRojasÎncă nu există evaluări
- 0201Document80 pagini0201Ashenafi Gebremeskel MezgeboÎncă nu există evaluări
- MoviTrac B Basic Operating InstructionsDocument36 paginiMoviTrac B Basic Operating InstructionsJack_ninerÎncă nu există evaluări
- Pvi-3000-4200 Usa ManualDocument88 paginiPvi-3000-4200 Usa ManualKarbonKaleÎncă nu există evaluări
- BN0926710101 Manual Ultimo AegDocument50 paginiBN0926710101 Manual Ultimo AegOsmar Marca CondoriÎncă nu există evaluări
- Panel Meter N15Z Type: Instruction ManualDocument20 paginiPanel Meter N15Z Type: Instruction ManualMihai BuzzÎncă nu există evaluări
- Save Vsr300 Manual de InstalacionDocument46 paginiSave Vsr300 Manual de InstalacionAlex WerthÎncă nu există evaluări
- Sinamics V20 Getting Started: Compact Operating InstructionsDocument24 paginiSinamics V20 Getting Started: Compact Operating InstructionsAlonso AguilarÎncă nu există evaluări
- Acue 3000 V1Document36 paginiAcue 3000 V1MARCO SILVA CABREJOÎncă nu există evaluări
- Micom p132 Vol - 1Document794 paginiMicom p132 Vol - 1amdatiÎncă nu există evaluări
- Sicam TM Io Module EngDocument139 paginiSicam TM Io Module EngGokhan MertÎncă nu există evaluări
- Sms Inhibit InverterDocument72 paginiSms Inhibit InverterAllan AgustinÎncă nu există evaluări
- Safe Use of Smart Devices in Systems Important to Safety in Nuclear Power PlantsDe la EverandSafe Use of Smart Devices in Systems Important to Safety in Nuclear Power PlantsÎncă nu există evaluări
- Power Electronics Applied to Industrial Systems and Transports: Volume 5: Measurement Circuits, Safeguards and Energy StorageDe la EverandPower Electronics Applied to Industrial Systems and Transports: Volume 5: Measurement Circuits, Safeguards and Energy StorageÎncă nu există evaluări
- The IEE Wiring Regulations Explained and IllustratedDe la EverandThe IEE Wiring Regulations Explained and IllustratedEvaluare: 4 din 5 stele4/5 (14)
- R&F TravellerDocument51 paginiR&F TravellerRanjan ChaudharyÎncă nu există evaluări
- Lakshmi Bobbin HoldersDocument2 paginiLakshmi Bobbin HoldersRanjan ChaudharyÎncă nu există evaluări
- Lakshmi Ring TravellersDocument2 paginiLakshmi Ring TravellersRanjan ChaudharyÎncă nu există evaluări
- Lakshmi Application ToolsDocument2 paginiLakshmi Application ToolsRanjan ChaudharyÎncă nu există evaluări
- Lakshmi Quickfix ManualDocument7 paginiLakshmi Quickfix ManualRanjan ChaudharyÎncă nu există evaluări
- Auxiliary Items For Flat Cards enDocument2 paginiAuxiliary Items For Flat Cards enRanjan ChaudharyÎncă nu există evaluări
- Instruction Manual Cum Spare Parts Catalogue-Sl3 (New) 31.3.14Document15 paginiInstruction Manual Cum Spare Parts Catalogue-Sl3 (New) 31.3.14Ranjan ChaudharyÎncă nu există evaluări
- A Quick Guide To Artificial IntelligenceDocument41 paginiA Quick Guide To Artificial IntelligenceFrancis Violet Raymond100% (2)
- MATLAB For Data VisualizationDocument63 paginiMATLAB For Data Visualizationfahmi fawjiÎncă nu există evaluări
- Dadm Assesment #2: Akshat BansalDocument24 paginiDadm Assesment #2: Akshat BansalAkshatÎncă nu există evaluări
- School Form 8 Grade 3Document20 paginiSchool Form 8 Grade 3Mimi Ng PinasÎncă nu există evaluări
- Vermicomposting Learning ModulesDocument6 paginiVermicomposting Learning ModulesPamara Prema Khannae100% (1)
- EDL E-Catalogue 2021-22 With ApticoDocument78 paginiEDL E-Catalogue 2021-22 With Apticotkteetopoi1Încă nu există evaluări
- Chapter 5: Current and Resistance: 5.1 The Motion of Electric ChargeDocument11 paginiChapter 5: Current and Resistance: 5.1 The Motion of Electric Chargeayunna ayunniÎncă nu există evaluări
- Interventional Studies 2Document28 paginiInterventional Studies 2Abdul RazzakÎncă nu există evaluări
- Hydraulic Excavator: Engine WeightsDocument28 paginiHydraulic Excavator: Engine WeightsFelipe Pisklevits LaubeÎncă nu există evaluări
- Aa DistriDocument3 paginiAa Distriakosiminda143Încă nu există evaluări
- Syllabus: Cambridge IGCSE (9-1) Art & Design 0989Document27 paginiSyllabus: Cambridge IGCSE (9-1) Art & Design 0989Jashan LoombaÎncă nu există evaluări
- Review Test 1: Circle The Correct Answers. / 5Document4 paginiReview Test 1: Circle The Correct Answers. / 5XeniaÎncă nu există evaluări
- Symmetrir and Order. Reasons To Live According The LodgeDocument6 paginiSymmetrir and Order. Reasons To Live According The LodgeAnonymous zfNrN9NdÎncă nu există evaluări
- ICSE Class 10 Chemistry Sample Mock Paper Term 2 Exam 2021 22Document5 paginiICSE Class 10 Chemistry Sample Mock Paper Term 2 Exam 2021 22dhruv sharmaÎncă nu există evaluări
- Assignment OSDocument11 paginiAssignment OSJunaidArshadÎncă nu există evaluări
- Elad Shapira - Shall We Play A Game - Lessons Learned While Playing CoreWars8086Document61 paginiElad Shapira - Shall We Play A Game - Lessons Learned While Playing CoreWars8086james wrightÎncă nu există evaluări
- Porsche Dealer Application DataDocument3 paginiPorsche Dealer Application DataEdwin UcheÎncă nu există evaluări
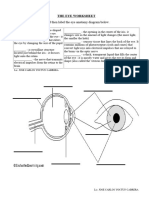
- The Eye WorksheetDocument3 paginiThe Eye WorksheetCally ChewÎncă nu există evaluări
- Chapter 17 Study Guide: VideoDocument7 paginiChapter 17 Study Guide: VideoMruffy DaysÎncă nu există evaluări
- JSSC JDLCCE 2021 (Civil Engineering) Official Pape 230615 233342Document39 paginiJSSC JDLCCE 2021 (Civil Engineering) Official Pape 230615 233342Bhuban KumbhakarÎncă nu există evaluări
- Thesis Preliminary PagesDocument8 paginiThesis Preliminary Pagesukyo0801Încă nu există evaluări
- Imaging Anatomy Brain and Spine Osborn 1 Ed 2020 PDFDocument3.130 paginiImaging Anatomy Brain and Spine Osborn 1 Ed 2020 PDFthe gaangster100% (1)
- Activity 4 - Energy Flow and Food WebDocument4 paginiActivity 4 - Energy Flow and Food WebMohamidin MamalapatÎncă nu există evaluări
- Super Gene 1201-1300Document426 paginiSuper Gene 1201-1300Henri AtanganaÎncă nu există evaluări
- Lifecycle of A Frog For Primary StudentsDocument10 paginiLifecycle of A Frog For Primary StudentsMónika KissÎncă nu există evaluări
- Maintaining Godly Spirituality in The Face of ChallengesDocument3 paginiMaintaining Godly Spirituality in The Face of ChallengesDavid OmoniyiÎncă nu există evaluări
- The Impact of Online Games To The AcademicDocument20 paginiThe Impact of Online Games To The AcademicJessica BacaniÎncă nu există evaluări