S-ar putea să vă placă și
- ResumeDocument1 paginăResumeJustin Charles AmorÎncă nu există evaluări
- Water From RoofsDocument82 paginiWater From RoofsJustin Charles AmorÎncă nu există evaluări
- Portal MethodDocument12 paginiPortal MethodJustin Charles AmorÎncă nu există evaluări
- Guidelines For Drinking WaterDocument668 paginiGuidelines For Drinking WaterJustin Charles AmorÎncă nu există evaluări
- BiotechDocument21 paginiBiotechJustin Charles AmorÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- HYDRO VesselsDocument5 paginiHYDRO VesselsMarvinPatricioNarca0% (1)
- Computer Science & Engineering Department ElectivesDocument13 paginiComputer Science & Engineering Department Electivesnitro gtnaÎncă nu există evaluări
- Testing and Maintenance of Steam TrapsDocument8 paginiTesting and Maintenance of Steam TrapsAjaypalsinh GohilÎncă nu există evaluări
- Technical VolumeDocument162 paginiTechnical Volumeiamskg63891583Încă nu există evaluări
- 1 GPM V1 vacuum dehydrator removes water down to 20 PPMDocument3 pagini1 GPM V1 vacuum dehydrator removes water down to 20 PPMLuis100% (1)
- SAFETY DATA SHEET TITLEDocument8 paginiSAFETY DATA SHEET TITLESukanta ChowdhuryÎncă nu există evaluări
- Plasmon CD-R ReviewDocument11 paginiPlasmon CD-R Reviewgrudva2Încă nu există evaluări
- BYG Опросный лист на режущую кромкуDocument51 paginiBYG Опросный лист на режущую кромкуMMM-MMMÎncă nu există evaluări
- Wacker Silres Ren - 60 - Silicone Resin Solution For Medium Solids or High Solids Heat ResistancDocument3 paginiWacker Silres Ren - 60 - Silicone Resin Solution For Medium Solids or High Solids Heat ResistancJameel AhsanÎncă nu există evaluări
- Tivizen Iplug Greek GuideDocument13 paginiTivizen Iplug Greek GuideDenexoÎncă nu există evaluări
- BOnd Strength ASTM-F904-98Document1 paginăBOnd Strength ASTM-F904-98akash.biradarÎncă nu există evaluări
- Lab 3 - Series and Parallel CircuitsDocument7 paginiLab 3 - Series and Parallel CircuitsHảo PhùngÎncă nu există evaluări
- Adf Interview Questions and AnsewrsDocument85 paginiAdf Interview Questions and Ansewrsleninbabus100% (2)
- E 20925Document214 paginiE 20925Ahmed ElshowbkeyÎncă nu există evaluări
- Project-BOQ - (Excluding VUP, LVUP)Document127 paginiProject-BOQ - (Excluding VUP, LVUP)Shivendra KumarÎncă nu există evaluări
- Standing Waves Worksheet SolutionsDocument6 paginiStanding Waves Worksheet SolutionsMaher TrabelsiÎncă nu există evaluări
- Interfacing Electrification and System ReliabilityDocument29 paginiInterfacing Electrification and System Reliabilityพี่จิน ยศเนืองนิตย์Încă nu există evaluări
- Revision Plan-II (DPP # 2) - Physics - EnglishDocument12 paginiRevision Plan-II (DPP # 2) - Physics - EnglishBhriguKansra50% (2)
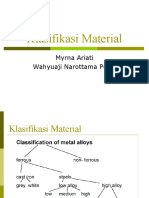
- Klasifikasi Material: Myrna Ariati Wahyuaji Narottama PutraDocument49 paginiKlasifikasi Material: Myrna Ariati Wahyuaji Narottama Putrachink07Încă nu există evaluări
- Documentation For: Bank - MasterDocument6 paginiDocumentation For: Bank - MastervijucoolÎncă nu există evaluări
- Electrical Power Transmission & DistributionDocument18 paginiElectrical Power Transmission & DistributionMd Saif KhanÎncă nu există evaluări
- What Is Physical GeologyDocument25 paginiWhat Is Physical GeologyMelanyÎncă nu există evaluări
- RC F18 Super Hornet - Manual v2.0Document13 paginiRC F18 Super Hornet - Manual v2.0Darren-Edward O'NeillÎncă nu există evaluări
- Partition WallDocument24 paginiPartition WallSHRADDHA GHUGEÎncă nu există evaluări
- SCT3030AL: 650V V R (Typ.) 30mDocument14 paginiSCT3030AL: 650V V R (Typ.) 30mSas Pro EletronicaÎncă nu există evaluări
- Cloud Radio Access Network Architecture Towards 5G NetworkDocument171 paginiCloud Radio Access Network Architecture Towards 5G NetworkwobblegobbleÎncă nu există evaluări
- Ci-2001 Ab OmDocument30 paginiCi-2001 Ab OmEnrique FlowersÎncă nu există evaluări
- GE Con Perkins Más StamfordDocument2 paginiGE Con Perkins Más Stamfordjim perdigonÎncă nu există evaluări
- PLKKKDocument36 paginiPLKKKelecompinnÎncă nu există evaluări
- PE Electromagnetic Pump Unit PE GB T1101 01-02-182Document4 paginiPE Electromagnetic Pump Unit PE GB T1101 01-02-182li geneÎncă nu există evaluări