S-ar putea să vă placă și
- Problemas resueltos de Hidráulica de CanalesDe la EverandProblemas resueltos de Hidráulica de CanalesEvaluare: 4.5 din 5 stele4.5/5 (7)
- Métodos Matriciales para ingenieros con MATLABDe la EverandMétodos Matriciales para ingenieros con MATLABEvaluare: 5 din 5 stele5/5 (1)
- Dinámica De Fluidos Computacional Para IngenierosDe la EverandDinámica De Fluidos Computacional Para IngenierosEvaluare: 4 din 5 stele4/5 (1)
- UF1670 - Reparación de equipos mecánicos y eléctricos de plantas de tratamiento de agua y plantas depuradorasDe la EverandUF1670 - Reparación de equipos mecánicos y eléctricos de plantas de tratamiento de agua y plantas depuradorasEvaluare: 5 din 5 stele5/5 (1)
- Ingeniería química. Soluciones a los problemas del tomo IDe la EverandIngeniería química. Soluciones a los problemas del tomo IÎncă nu există evaluări
- PNL y Educación PDFDocument59 paginiPNL y Educación PDFMatiasÎncă nu există evaluări
- Índice Como Hacerlo Con HierbasDocument11 paginiÍndice Como Hacerlo Con HierbasDaniel López Marín100% (1)
- Introducción a la dinámica computacional de fluidos (CFD) en Ingeniería Química.De la EverandIntroducción a la dinámica computacional de fluidos (CFD) en Ingeniería Química.Încă nu există evaluări
- Sistemas 1er2do Orden Ejercicios ResueltosDocument10 paginiSistemas 1er2do Orden Ejercicios ResueltosOrlando Pérez Vargas50% (2)
- Instructivo de La Espatula Ultrasonica 2Document3 paginiInstructivo de La Espatula Ultrasonica 2Rana Vg100% (1)
- Materia, Estructura y PeriodicidadDocument46 paginiMateria, Estructura y PeriodicidadMary Chuy Navarro100% (1)
- La ecuación general de segundo grado en dos y tres variablesDe la EverandLa ecuación general de segundo grado en dos y tres variablesÎncă nu există evaluări
- Ejercicios de Integrales de Línea, Superficie y VolumenDe la EverandEjercicios de Integrales de Línea, Superficie y VolumenEvaluare: 4 din 5 stele4/5 (2)
- Matlab Archivo ZN1Document13 paginiMatlab Archivo ZN1Wilmar Pedro Ramos HinojosaÎncă nu există evaluări
- Teoría de Control - Problemas IntegradoresDocument17 paginiTeoría de Control - Problemas Integradoresjulietlm73Încă nu există evaluări
- Módulo 15Document6 paginiMódulo 15Martin Medrano PradoÎncă nu există evaluări
- 7 Funcion de Transferencia Primer OrdenDocument13 pagini7 Funcion de Transferencia Primer OrdenAna MelendezÎncă nu există evaluări
- Probl-1° y 2° OrdenDocument8 paginiProbl-1° y 2° OrdenCarlos UsuaÎncă nu există evaluări
- Modelos en Tiempo DiscretoDocument41 paginiModelos en Tiempo DiscretoMichael ßermeoÎncă nu există evaluări
- Laboratorio3 Control DigitalDocument16 paginiLaboratorio3 Control DigitalCésar Augusto Q. LaverianoÎncă nu există evaluări
- Laboratorio 2 InformeDocument13 paginiLaboratorio 2 InformeAlejandro Morales VelezÎncă nu există evaluări
- SISTEMAS de CONTROL I Ejercicios Resueltos Parte 3Document12 paginiSISTEMAS de CONTROL I Ejercicios Resueltos Parte 3Rolando Choque CahuanaÎncă nu există evaluări
- 3 Procesos de 1er OrdenDocument20 pagini3 Procesos de 1er OrdenFelipe MonteroÎncă nu există evaluări
- 12) Diagrama de BloquesDocument22 pagini12) Diagrama de BloquesyuiÎncă nu există evaluări
- Tarea 2.1 CaroDocument14 paginiTarea 2.1 CaroDaniel PancheÎncă nu există evaluări
- 13.efectos de La RealimentacionDocument6 pagini13.efectos de La RealimentacionJessica Leandra Velasco PérezÎncă nu există evaluări
- Tele Me TriaDocument25 paginiTele Me TriaCristianAriasÎncă nu există evaluări
- Ejercicios Resueltos 3er ParcialDocument3 paginiEjercicios Resueltos 3er ParcialEdwin Santiago Villegas AuquesÎncă nu există evaluări
- Examenes Rae 0708Document40 paginiExamenes Rae 0708Milton Fonseca ZuritaÎncă nu există evaluări
- SCD Lab1-PreinfDocument4 paginiSCD Lab1-PreinfLuis RubioÎncă nu există evaluări
- Problemas PDFDocument67 paginiProblemas PDFHenry ArenasÎncă nu există evaluări
- TP2 Simulink 2021Document4 paginiTP2 Simulink 2021chau_riberÎncă nu există evaluări
- Controlador SISODocument3 paginiControlador SISOPablo VianaÎncă nu există evaluări
- ApprobDocument6 paginiApprobKhevin Lizano BorreroÎncă nu există evaluări
- Informe Final N2-Controlador PIDDocument10 paginiInforme Final N2-Controlador PIDMichael Infantes HuacancaÎncă nu există evaluări
- Trabajo Parcial Nº2Document45 paginiTrabajo Parcial Nº2Nacho CagideÎncă nu există evaluări
- 4 Procesos de Orden SuperiorDocument27 pagini4 Procesos de Orden SuperiormkrzoÎncă nu există evaluări
- Función de Trasnferencia Segundo OrdenDocument16 paginiFunción de Trasnferencia Segundo OrdenfepafuÎncă nu există evaluări
- Identificacion SintonizacionDocument64 paginiIdentificacion SintonizacionIrma Elsa Cuellar SalamancaÎncă nu există evaluări
- Dcfconv CLASE12eneroDocument26 paginiDcfconv CLASE12eneroJair Eduardo Pinto PintoÎncă nu există evaluări
- Solucion de Smith Corripio 9-22Document27 paginiSolucion de Smith Corripio 9-22Isbell Dayana Quispe CárdenasÎncă nu există evaluări
- Respuestas Ejercicios Tema 6Document10 paginiRespuestas Ejercicios Tema 6Pascual MaféÎncă nu există evaluări
- Diseño de Controlador Pid Natalia SalasDocument9 paginiDiseño de Controlador Pid Natalia SalasNataliaÎncă nu există evaluări
- Ut8. Actividades ResueltasDocument20 paginiUt8. Actividades ResueltasDaniel Garcia FradejasÎncă nu există evaluări
- CSTR DefDocument10 paginiCSTR DefFernando AlvarezÎncă nu există evaluări
- Wilsonarevalo Tarea1Document24 paginiWilsonarevalo Tarea1Jonathan Lozano CastilloÎncă nu există evaluări
- Control e Instrumentación de Procesos Químicos:) 2 T (Bu VT DT DV VDocument67 paginiControl e Instrumentación de Procesos Químicos:) 2 T (Bu VT DT DV VRenzo PinedoÎncă nu există evaluări
- Examen Sustitutorio de Control II 2012-IDocument5 paginiExamen Sustitutorio de Control II 2012-IYefer Tony Sánchez CáceresÎncă nu există evaluări
- Laboratorio 1 - Sistema de Control Digital - 01Document19 paginiLaboratorio 1 - Sistema de Control Digital - 01Boris Benites CalenzaniÎncă nu există evaluări
- Evidencia 1 ControlDocument10 paginiEvidencia 1 ControlarturoÎncă nu există evaluări
- Ejercicios Unidad2 2013 2 PDFDocument3 paginiEjercicios Unidad2 2013 2 PDFAlejandro Velez SalasÎncă nu există evaluări
- Funcion de TransferenciaDocument32 paginiFuncion de TransferenciaSilvia VrÎncă nu există evaluări
- Trabajo Final Dinámica de ProcesoDocument11 paginiTrabajo Final Dinámica de ProcesoNATALIA ORTIZ FERNANDEZÎncă nu există evaluări
- Requerimientos de Diseño Del Controlador PIDDocument5 paginiRequerimientos de Diseño Del Controlador PIDRamon TorresÎncă nu există evaluări
- 13 Dinamica Del Bucle CerradoDocument9 pagini13 Dinamica Del Bucle CerradoAbigail MCabezasÎncă nu există evaluări
- Control 2 - SintonizacionDocument12 paginiControl 2 - SintonizacionAdrian Leonardo GarciaÎncă nu există evaluări
- Respuesta TransitoriaDocument25 paginiRespuesta Transitoriasofia_ana50% (2)
- Laboratorio Virtual 6 - Interambio de CalorDocument8 paginiLaboratorio Virtual 6 - Interambio de CalorAnyy Ocon TtitoÎncă nu există evaluări
- Capitulo2 Analisis de Rta TransitoriaDocument20 paginiCapitulo2 Analisis de Rta TransitoriaMathewwEulerÎncă nu există evaluări
- EjerciciosDocument49 paginiEjerciciosAlejandro LópezÎncă nu există evaluări
- H.C PREGUNTA 1, 2 y 3y5Document7 paginiH.C PREGUNTA 1, 2 y 3y5Alejandro QuisiverdeÎncă nu există evaluări
- Las Tensiones NaturalesDocument40 paginiLas Tensiones NaturalesManuel Antonio Jacinto Juárez78% (9)
- Panel PDFDocument3 paginiPanel PDFAnonymous xBi2FsBxÎncă nu există evaluări
- Tratamiento de Aguas ResidualesDocument2 paginiTratamiento de Aguas ResidualesNéstor SoderguitÎncă nu există evaluări
- Dan Flavin y ObrasDocument11 paginiDan Flavin y ObrasAlison FernandezÎncă nu există evaluări
- Seguros Groupama - HogarDocument28 paginiSeguros Groupama - HogarTmaxFer100% (1)
- Taller1 2019-02 PDFDocument2 paginiTaller1 2019-02 PDFJOSE FERNANDO GONZALEZ RIVERAÎncă nu există evaluări
- Aire AcondisionadoDocument10 paginiAire AcondisionadoXavier Alvarez100% (1)
- 1sew EsDocument20 pagini1sew EsCarlos GutierrezÎncă nu există evaluări
- Un Montón de Imágenes RotasDocument3 paginiUn Montón de Imágenes RotasClaudia MammanaÎncă nu există evaluări
- Informe de DifraccionDocument6 paginiInforme de DifraccionAlejandra ArroyaveÎncă nu există evaluări
- ANAMNESISDocument7 paginiANAMNESISStella Roman MorelÎncă nu există evaluări
- Palazzoli Catalogo2014 2015 Es BassaDocument468 paginiPalazzoli Catalogo2014 2015 Es BassaOzkare Hernandez RenteralÎncă nu există evaluări
- Propuesta - Rol de MenúDocument3 paginiPropuesta - Rol de MenúAnonymous 7VCRJYCPÎncă nu există evaluări
- Catalogo y Especificaciones Diodos Y SMDDocument10 paginiCatalogo y Especificaciones Diodos Y SMDGerardo MediabillaÎncă nu există evaluări
- Cronograma Examen Sustitutorio Sem Acad. 2021-I UltimoDocument3 paginiCronograma Examen Sustitutorio Sem Acad. 2021-I UltimoCRISTHIAN CRUZ VILCAÎncă nu există evaluări
- Lectura Quién Mató A NapoleónDocument3 paginiLectura Quién Mató A NapoleónLau CasqueraÎncă nu există evaluări
- La Montaña Del CondorDocument161 paginiLa Montaña Del Condorgomezrendon50% (2)
- Ficha Tecnica Cilindro Telescopico HTR4350 HolmatroDocument1 paginăFicha Tecnica Cilindro Telescopico HTR4350 HolmatroAnonymous XUkY1xÎncă nu există evaluări
- Anahita, Diosa Persa de Las Aguas, La Sanación y La Sabiduría.Document5 paginiAnahita, Diosa Persa de Las Aguas, La Sanación y La Sabiduría.MasMatesÎncă nu există evaluări
- Component Es Inter No S CpuDocument21 paginiComponent Es Inter No S CpuASISTENTE ADMINISTRATIVOÎncă nu există evaluări
- Propiedades de LíquidosDocument42 paginiPropiedades de LíquidosAndresÎncă nu există evaluări
- Parte Urba CrissDocument8 paginiParte Urba CrissAlexandra GonzalesÎncă nu există evaluări
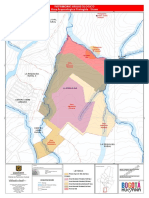
- Mapa Usme IDPC Areas ProtegidasDocument1 paginăMapa Usme IDPC Areas ProtegidasYeinner Andres Lopez NarvaezÎncă nu există evaluări
- La Isla Del TesoroDocument2 paginiLa Isla Del TesoroPepeÎncă nu există evaluări
- Guia Ecuaciones 6 BasicoDocument4 paginiGuia Ecuaciones 6 BasicoAlexander ValdésÎncă nu există evaluări