S-ar putea să vă placă și
- GBA 26800 H IV OVF 20 Service - ToolDocument31 paginiGBA 26800 H IV OVF 20 Service - ToolIvcha80% (15)
- Start Up Routine OVF10 PDFDocument12 paginiStart Up Routine OVF10 PDFEng M ElseaidyÎncă nu există evaluări
- Start Up Routine: Field Component ManualDocument12 paginiStart Up Routine: Field Component Manualihwisso100% (5)
- Gba 26800 H II Startup PDFDocument15 paginiGba 26800 H II Startup PDFJms QuinteroÎncă nu există evaluări
- GAA 24350 AW11 IVa PDFDocument31 paginiGAA 24350 AW11 IVa PDFEvgeniyÎncă nu există evaluări
- Dbss - HSDD - Startup Routine: Field Component ManualDocument25 paginiDbss - HSDD - Startup Routine: Field Component ManualМихаил100% (1)
- (PDF) BD Advands Diagnostic and Trouble Shooting GECB-LV - 2013!06!17Document17 pagini(PDF) BD Advands Diagnostic and Trouble Shooting GECB-LV - 2013!06!17boneyÎncă nu există evaluări
- MCS LCB II List of ParametersDocument26 paginiMCS LCB II List of ParametersMalik AsifÎncă nu există evaluări
- FSD GAA30780EAN Feature and Set Up Description - 2015!05!28Document196 paginiFSD GAA30780EAN Feature and Set Up Description - 2015!05!28Nebyu GetachewÎncă nu există evaluări
- Diagnostico Ascensor ThyssengropDocument51 paginiDiagnostico Ascensor ThyssengroprodolfoÎncă nu există evaluări
- FSM SV Tool Gecb 2007 10 26 PDFDocument23 paginiFSM SV Tool Gecb 2007 10 26 PDFTemoÎncă nu există evaluări
- LBII ParametrosDocument37 paginiLBII ParametrosPolinho Donacimento100% (1)
- Mcs - LCB Ii: RSL: List of Inputs and OutputsDocument28 paginiMcs - LCB Ii: RSL: List of Inputs and OutputsMelissa Knight80% (5)
- Gba 26800 H Viii SoftwareDocument4 paginiGba 26800 H Viii SoftwareIvcha100% (1)
- Ovf20cro AdtDocument49 paginiOvf20cro AdtAriel Ariel83% (6)
- 506NCE DAA26200R - SUI - 090713 - Start-UpDocument8 pagini506NCE DAA26200R - SUI - 090713 - Start-UpPolinho Donacimento0% (1)
- Controllers Elevonic SeriesDocument58 paginiControllers Elevonic SeriesSamuel Acevedo100% (1)
- Guide Lines: Field Component ManualDocument21 paginiGuide Lines: Field Component ManualOsman ElmaradnyÎncă nu există evaluări
- List of Installation Parameters: Software Basic Data Mcs - LCB - IiDocument43 paginiList of Installation Parameters: Software Basic Data Mcs - LCB - IiBartz SantosÎncă nu există evaluări
- Gaa 24350 Aw11 Ii PDFDocument22 paginiGaa 24350 Aw11 Ii PDFEvgeniy100% (1)
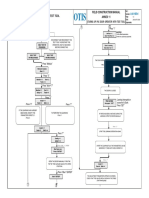
- Field Construction Manual Annex 11 Manual Learning Mode Using Test ToolDocument2 paginiField Construction Manual Annex 11 Manual Learning Mode Using Test ToolprasadÎncă nu există evaluări
- Otis Software Basic Data PDFDocument23 paginiOtis Software Basic Data PDFReynold Suarez100% (1)
- Ovf20 CR: Repair Instructions ServiceDocument7 paginiOvf20 CR: Repair Instructions ServiceMatti HynniÎncă nu există evaluări
- Acd4 MRLDocument66 paginiAcd4 MRLRafael BrunoÎncă nu există evaluări
- Precision Escalator Parts CatalogDocument10 paginiPrecision Escalator Parts CatalogmohammedalathwaryÎncă nu există evaluări
- RCBII RSL Parameters - 4767764251226047386845665916 PDFDocument67 paginiRCBII RSL Parameters - 4767764251226047386845665916 PDFBartz Santos0% (1)
- Replace Ovf20-Crc PDFDocument7 paginiReplace Ovf20-Crc PDFRawad Jaber50% (4)
- Service Tool Reference List: Field Component ManualDocument11 paginiService Tool Reference List: Field Component ManualRobert Aguilar100% (3)
- Modu SoftDocument2 paginiModu Softhabibulla100% (1)
- MCS220-MCS120 parameters-GAA30082DAC InsDocument43 paginiMCS220-MCS120 parameters-GAA30082DAC InsCoil98Încă nu există evaluări
- Drawing 300 VF PDFDocument51 paginiDrawing 300 VF PDFAnonymous EstxH7100% (1)
- GBA 26800 H III Service Handling PDFDocument15 paginiGBA 26800 H III Service Handling PDFKopi HitamÎncă nu există evaluări
- Permanent-magnetism Frequency-conversion Door Operator User's GuideDocument38 paginiPermanent-magnetism Frequency-conversion Door Operator User's GuideAN NhiênÎncă nu există evaluări
- HYDRODocument4 paginiHYDROPolinho Donacimento100% (1)
- DCSS BD Service Tool Manual GAA31064AAA 2007-01-19 10417955481260589056Document42 paginiDCSS BD Service Tool Manual GAA31064AAA 2007-01-19 10417955481260589056Ace Noah SomintacÎncă nu există evaluări
- TCBCDocument29 paginiTCBChmbx67% (12)
- Acd2 Mrlxaa21310as - Santa AnitaDocument110 paginiAcd2 Mrlxaa21310as - Santa AnitaRafael BrunoÎncă nu există evaluări
- C U H Máy Kéo Sigma OtisDocument45 paginiC U H Máy Kéo Sigma OtisQuang Pham DuyÎncă nu există evaluări
- MRL E-Pack Assay Instructions For Tests and VerificationsDocument35 paginiMRL E-Pack Assay Instructions For Tests and VerificationsLe Huynh LongÎncă nu există evaluări
- Star-Up Lbii BD Component Start Up Gaa30163aaf - 2007!10!11Document17 paginiStar-Up Lbii BD Component Start Up Gaa30163aaf - 2007!10!11Polinho DonacimentoÎncă nu există evaluări
- Di S1Document9 paginiDi S1FERNS100% (2)
- Remote Serial Link Training for Otis Elevator TechniciansDocument69 paginiRemote Serial Link Training for Otis Elevator TechniciansSamuel AcevedoÎncă nu există evaluări
- Service ToolDocument92 paginiService ToolIvcha50% (4)
- UT ID 22.17.1 3 Otis Glide A Electrical Setup and Startup ManualDocument68 paginiUT ID 22.17.1 3 Otis Glide A Electrical Setup and Startup ManualFahadÎncă nu există evaluări
- Unpublished Work-© Otis Elevator Co. 2009Document33 paginiUnpublished Work-© Otis Elevator Co. 2009Quang Pham Duy100% (1)
- OTIS Elevator Fault Code: LCB-2, TCBC and GECB Board Faults - Elevatorvip - Com - 1627641777743Document5 paginiOTIS Elevator Fault Code: LCB-2, TCBC and GECB Board Faults - Elevatorvip - Com - 1627641777743Aluko Damilare MosesÎncă nu există evaluări
- Частотник ошибки PDFDocument146 paginiЧастотник ошибки PDFValerii Sypchenko100% (1)
- Characteristics - Igtf Landing ArrangementDocument56 paginiCharacteristics - Igtf Landing ArrangementMAYESTON100% (1)
- DiSi (210) TroubleshootingDocument4 paginiDiSi (210) TroubleshootingFERNSÎncă nu există evaluări
- Regen Drive UK PDFDocument2 paginiRegen Drive UK PDFAliRouyouÎncă nu există evaluări
- Tip 31.2-6 - Dbss Printed Circuit Boards Returned For RepairDocument3 paginiTip 31.2-6 - Dbss Printed Circuit Boards Returned For RepairPolinho Donacimento100% (1)
- OTIS (Instruction Manual For TOMCB Converter Board)Document26 paginiOTIS (Instruction Manual For TOMCB Converter Board)Ariel LeonÎncă nu există evaluări
- 01 Muse Acd3 T&C MSKDocument42 pagini01 Muse Acd3 T&C MSKRenee Carranza100% (3)
- SVT GreskeDocument17 paginiSVT GreskeIvcha100% (6)
- Elevator Mechanic: Passbooks Study GuideDe la EverandElevator Mechanic: Passbooks Study GuideÎncă nu există evaluări
- Elevator Mechanic's Helper: Passbooks Study GuideDe la EverandElevator Mechanic's Helper: Passbooks Study GuideÎncă nu există evaluări
- Elevator Troubleshooting & Repair: A Technician's Certification Study GuideDe la EverandElevator Troubleshooting & Repair: A Technician's Certification Study GuideEvaluare: 4 din 5 stele4/5 (9)
- Ovf20 Startup RoutineDocument14 paginiOvf20 Startup RoutineRaja DuraiÎncă nu există evaluări
- Troublesshooting Manual 3b6 PDFDocument50 paginiTroublesshooting Manual 3b6 PDFAugusto Oliveira86% (21)
- Smi 136Document13 paginiSmi 136Nagaraj RaoÎncă nu există evaluări
- GETM1 5、GETM1 9、GETM3 0Document51 paginiGETM1 5、GETM1 9、GETM3 0Ivcha75% (4)
- SVT GreskeDocument17 paginiSVT GreskeIvcha100% (6)
- Service ToolDocument92 paginiService ToolIvcha50% (4)
- Gba26800bbi Fc1 Service Pandel Board-2Document22 paginiGba26800bbi Fc1 Service Pandel Board-2Ivcha94% (16)
- OTIS GEN2 Za Programming ToolDocument34 paginiOTIS GEN2 Za Programming ToolIvcha90% (41)
- OTIS GEN2 Za Programming ToolDocument34 paginiOTIS GEN2 Za Programming ToolIvcha90% (41)
- Gba 26800 H Viii SoftwareDocument4 paginiGba 26800 H Viii SoftwareIvcha100% (1)
- GBA 26800 H III Service - HandlingDocument15 paginiGBA 26800 H III Service - HandlingIvcha100% (1)
- GBA 26800 H I Guide - LinesDocument21 paginiGBA 26800 H I Guide - LinesIvchaÎncă nu există evaluări
- GBA 26800 H I Guide - LinesDocument21 paginiGBA 26800 H I Guide - LinesIvchaÎncă nu există evaluări
- OTIS Berlin GDCB Software VersionDocument4 paginiOTIS Berlin GDCB Software VersionIvcha100% (3)
- GAA30328BAA Dcss5 Service Tool Reference ListDocument19 paginiGAA30328BAA Dcss5 Service Tool Reference ListIvcha100% (7)
- Instruction For OperationDocument16 paginiInstruction For OperationAanantharaj LourdesamyÎncă nu există evaluări
- Report North Point IncidentDocument29 paginiReport North Point Incidentsimoncarter313Încă nu există evaluări
- Volvo Compact Excavators 5.5 T 52.1 HPDocument12 paginiVolvo Compact Excavators 5.5 T 52.1 HPMade Shri Wijaya SunuÎncă nu există evaluări
- (Editted) Design Manual - Barrier Free Access 2008Document16 pagini(Editted) Design Manual - Barrier Free Access 2008DamianÎncă nu există evaluări
- ARES Escalator BDocument2 paginiARES Escalator BGutmonarchÎncă nu există evaluări
- The Draft National Building Regulations (National Building Code) 2020Document356 paginiThe Draft National Building Regulations (National Building Code) 2020alvanÎncă nu există evaluări
- Qdoc - Tips Cryptomancer Code Amp Dagger Volume IIDocument75 paginiQdoc - Tips Cryptomancer Code Amp Dagger Volume IIMistergiovanne MonteiroÎncă nu există evaluări
- Tract El Tir ForDocument26 paginiTract El Tir FormapaoloniÎncă nu există evaluări
- Human Body Size in Lift Traffic Design: Janne Sorsa, Mirko Ruokokoski and Marja-Liisa SiikonenDocument11 paginiHuman Body Size in Lift Traffic Design: Janne Sorsa, Mirko Ruokokoski and Marja-Liisa SiikonenfreddyjoertyÎncă nu există evaluări
- Vertical Transportation SystemDocument14 paginiVertical Transportation Systempassionpropel100% (3)
- Service & Maintenance: 30e 35e N35e 40e N40e 45eDocument98 paginiService & Maintenance: 30e 35e N35e 40e N40e 45eGiancarlho RiosÎncă nu există evaluări
- Earthworks Method StatementDocument23 paginiEarthworks Method Statementukpong aniefiokÎncă nu există evaluări
- "Eyeplus" Software: Edition July 2006Document59 pagini"Eyeplus" Software: Edition July 2006Handy LeeÎncă nu există evaluări
- Hyster 279YDocument30 paginiHyster 279Ymilton apraezÎncă nu există evaluări
- Allianz Ship Lifting Operations ProcedureDocument18 paginiAllianz Ship Lifting Operations ProcedureHSE PULAI AÎncă nu există evaluări
- 60ZV Cl0605xe07 PDFDocument8 pagini60ZV Cl0605xe07 PDFHao Minh KhueÎncă nu există evaluări
- Indian Standard For LiftsDocument11 paginiIndian Standard For LiftsSomnath DasÎncă nu există evaluări
- M and e Induction CourseDocument10 paginiM and e Induction CourseTiffany CombsÎncă nu există evaluări
- V3 ManualDocument279 paginiV3 ManualSazzad Hossan RaselÎncă nu există evaluări
- LeFiell Beef CatalogDocument68 paginiLeFiell Beef CatalogElenaLavÎncă nu există evaluări
- Catalogue of Hyundai ElevatorDocument10 paginiCatalogue of Hyundai ElevatorPreetham PusalaÎncă nu există evaluări
- Construction Site Safety GuideDocument61 paginiConstruction Site Safety Guiderobinrubina100% (1)
- Residential Vacuum Elevators ExplainedDocument6 paginiResidential Vacuum Elevators Explainednebojsa bohorÎncă nu există evaluări
- BH Cat 318EDocument32 paginiBH Cat 318EElma maranÎncă nu există evaluări
- Appendix 22 - Atpac Technical SpecifcationDocument34 paginiAppendix 22 - Atpac Technical SpecifcationJose MedinaÎncă nu există evaluări
- MUSE ED Elevator: Installation ManualDocument16 paginiMUSE ED Elevator: Installation ManualMoises PerelloÎncă nu există evaluări
- Masterformat: Prepared By: Ar. MelaDocument22 paginiMasterformat: Prepared By: Ar. MelaEricksonÎncă nu există evaluări
- Oisd-Gdn-203Document22 paginiOisd-Gdn-203Rajesh SutharÎncă nu există evaluări
- MEP Matrix for Radisson Blu HotelDocument11 paginiMEP Matrix for Radisson Blu HotelCергей Нарине100% (1)
- TEL Derrick Brochure - WebsiteDocument8 paginiTEL Derrick Brochure - WebsitePete AÎncă nu există evaluări