S-ar putea să vă placă și
- Basic Data Lbii Basic Data LB Ii - 1997!02!17Document29 paginiBasic Data Lbii Basic Data LB Ii - 1997!02!17Polinho Donacimento75% (4)
- Introduction to Reliable and Secure Distributed ProgrammingDe la EverandIntroduction to Reliable and Secure Distributed ProgrammingÎncă nu există evaluări
- Microcontroller Interview Questions and Answers PDFDocument8 paginiMicrocontroller Interview Questions and Answers PDFbalaji_446913478Încă nu există evaluări
- A System Bus Power: Systematic To AlgorithmsDocument12 paginiA System Bus Power: Systematic To AlgorithmsNandhini RamamurthyÎncă nu există evaluări
- Tampere University of TechnologyDocument18 paginiTampere University of TechnologyDanilo OliveiraÎncă nu există evaluări
- OS Modules SummaryDocument6 paginiOS Modules SummaryshilpasgÎncă nu există evaluări
- A Survey On Cache Management Mechanisms For Real-Time Embedded SystemsDocument35 paginiA Survey On Cache Management Mechanisms For Real-Time Embedded SystemsAtulÎncă nu există evaluări
- MSC Exam For Feature Use: Non-Preemptive and Preemptive Scheduling AlgorithmDocument6 paginiMSC Exam For Feature Use: Non-Preemptive and Preemptive Scheduling AlgorithmAddisu DessalegnÎncă nu există evaluări
- MSC Exam For Feature Use: Non-Preemptive and Preemptive Scheduling AlgorithmDocument6 paginiMSC Exam For Feature Use: Non-Preemptive and Preemptive Scheduling AlgorithmLens NewÎncă nu există evaluări
- Checkpoint-Based Fault-Tolerant Infrastructure For Virtualized Service ProvidersDocument8 paginiCheckpoint-Based Fault-Tolerant Infrastructure For Virtualized Service ProvidersDevacc DevÎncă nu există evaluări
- Pal A Charla 1997Document13 paginiPal A Charla 1997Gokul SubramaniÎncă nu există evaluări
- Non Inclusive CachesDocument10 paginiNon Inclusive CachesJohnÎncă nu există evaluări
- Ieee ICDCS90Document8 paginiIeee ICDCS90ayaan khanÎncă nu există evaluări
- SJB Institute of TechnologyDocument18 paginiSJB Institute of TechnologySrisha UralaÎncă nu există evaluări
- Bcs Higher Education Qualifications BCS Level 6 Professional Graduate Diploma in IT April 2011 Examiners' Report Distributed & Parallel SystemsDocument7 paginiBcs Higher Education Qualifications BCS Level 6 Professional Graduate Diploma in IT April 2011 Examiners' Report Distributed & Parallel SystemsOzioma IhekwoabaÎncă nu există evaluări
- Assignment4-Rennie RamlochanDocument7 paginiAssignment4-Rennie RamlochanRennie RamlochanÎncă nu există evaluări
- Data Similarity-Aware Computation Infrastructure For The CloudDocument14 paginiData Similarity-Aware Computation Infrastructure For The CloudAjay TaradeÎncă nu există evaluări
- N Fficient Multiprocessor Emory Management Framework Using Multi AgentsDocument17 paginiN Fficient Multiprocessor Emory Management Framework Using Multi AgentscseijÎncă nu există evaluări
- CCT Unit - 1Document26 paginiCCT Unit - 1vedha0118Încă nu există evaluări
- High-Performance Linux Cluster Monitoring Using Java: Curtis Smith and David Henry Linux Networx, IncDocument14 paginiHigh-Performance Linux Cluster Monitoring Using Java: Curtis Smith and David Henry Linux Networx, IncFabryziani Ibrahim Asy Sya'baniÎncă nu există evaluări
- Assignment1-Rennie Ramlochan (31.10.13)Document7 paginiAssignment1-Rennie Ramlochan (31.10.13)Rennie RamlochanÎncă nu există evaluări
- Abrar HHG Gjugh KGJGHDocument23 paginiAbrar HHG Gjugh KGJGHrayedkhanÎncă nu există evaluări
- Icst 1011Document6 paginiIcst 1011International Jpurnal Of Technical Research And ApplicationsÎncă nu există evaluări
- Computer Science Notes 722Document3 paginiComputer Science Notes 722Biplap HomeÎncă nu există evaluări
- Component Based On Embedded SystemDocument6 paginiComponent Based On Embedded Systemu_mohitÎncă nu există evaluări
- Lecture 2.0 - Issues in Design of Distributed SystemDocument14 paginiLecture 2.0 - Issues in Design of Distributed SystemLynn Cynthia NyawiraÎncă nu există evaluări
- Chapter11.Real Time SystemsDocument29 paginiChapter11.Real Time SystemsAllan WachiraÎncă nu există evaluări
- Timing Analysis: in Search of Multiple ParadigmsDocument4 paginiTiming Analysis: in Search of Multiple Paradigmsvimal_raj205Încă nu există evaluări
- Aca Unit5Document13 paginiAca Unit5karunakarÎncă nu există evaluări
- Components in Real-Time SystemsDocument12 paginiComponents in Real-Time SystemsSupervis0rÎncă nu există evaluări
- Scheduling in Distributed SystemsDocument9 paginiScheduling in Distributed SystemsArjun HajongÎncă nu există evaluări
- Strategy For Power Efficient Design of PDocument8 paginiStrategy For Power Efficient Design of PsingarayyaswamyÎncă nu există evaluări
- User SandboxDocument11 paginiUser SandboxTantawyÎncă nu există evaluări
- Fuss, Futexes and Furwocks: Fast Userlevel Locking in LinuxDocument19 paginiFuss, Futexes and Furwocks: Fast Userlevel Locking in LinuxSnehansu Sekhar SahuÎncă nu există evaluări
- Crash-Only SoftwareDocument6 paginiCrash-Only SoftwareJeremySharpÎncă nu există evaluări
- Mod 4Document19 paginiMod 4PraneethÎncă nu există evaluări
- ES II AssignmentDocument10 paginiES II AssignmentRahul MandaogadeÎncă nu există evaluări
- RTESDocument7 paginiRTESDevika KachhawahaÎncă nu există evaluări
- DownloadDocument23 paginiDownloadShankar NarayanaÎncă nu există evaluări
- An Adaptive Programming Model For Fault-Tolerant Distributed ComputingDocument14 paginiAn Adaptive Programming Model For Fault-Tolerant Distributed ComputingieeexploreprojectsÎncă nu există evaluări
- Flexible Rollback Recovery in Dynamic Heterogeneous Grid ComputingDocument13 paginiFlexible Rollback Recovery in Dynamic Heterogeneous Grid ComputingKiran GhantaÎncă nu există evaluări
- Communication and ConcurrencyDocument3 paginiCommunication and ConcurrencyAmit SahaÎncă nu există evaluări
- A Study of Software Multithreading in DistributedDocument26 paginiA Study of Software Multithreading in DistributedPalanikumarÎncă nu există evaluări
- Operating SystemDocument18 paginiOperating SystemGROOT GamingYTÎncă nu există evaluări
- Aad4 PDFDocument19 paginiAad4 PDFshafikÎncă nu există evaluări
- Marsh, Scott, Leblanc, Markatos - First-Class User-Level ThreadsDocument12 paginiMarsh, Scott, Leblanc, Markatos - First-Class User-Level ThreadsJoaquin Lino de la TorreÎncă nu există evaluări
- HOMEWORK 213 Lovely Professional UniversityDocument4 paginiHOMEWORK 213 Lovely Professional UniversityJasminder PalÎncă nu există evaluări
- LocusDocument26 paginiLocusprizzydÎncă nu există evaluări
- Eliminating Routing Congestion Issues With Logic SynthesisDocument7 paginiEliminating Routing Congestion Issues With Logic SynthesisCharan TejaÎncă nu există evaluări
- Performance Evaluation of Overload Control in Multi-Cluster GridsDocument8 paginiPerformance Evaluation of Overload Control in Multi-Cluster GridsMike GordonÎncă nu există evaluări
- 326 1262 1 PB Distributed ComputingDocument51 pagini326 1262 1 PB Distributed Computingmaster2020Încă nu există evaluări
- Patterns To Ease The Port of Micro-Kernels in Embedded SystemsDocument16 paginiPatterns To Ease The Port of Micro-Kernels in Embedded SystemsTommy YenÎncă nu există evaluări
- Processes: Distributed Systems Principles and ParadigmsDocument78 paginiProcesses: Distributed Systems Principles and ParadigmsZain HamzaÎncă nu există evaluări
- Chapter - 1: Objective StatementDocument73 paginiChapter - 1: Objective StatementMithun Prasath TheerthagiriÎncă nu există evaluări
- Research Papers On Deadlock in Distributed SystemDocument7 paginiResearch Papers On Deadlock in Distributed Systemgw219k4yÎncă nu există evaluări
- OS Question Bank 5/8888Document15 paginiOS Question Bank 5/8888Harsh KumarÎncă nu există evaluări
- Answers Chapter 1 To 4Document4 paginiAnswers Chapter 1 To 4parameshwar6Încă nu există evaluări
- Research Paper PDFDocument6 paginiResearch Paper PDFNemraÎncă nu există evaluări
- SEM 3 BC0042 1 Operating SystemsDocument27 paginiSEM 3 BC0042 1 Operating Systemsraju_ahmed_37Încă nu există evaluări
- Temporal QOS Management in Scientific Cloud Workflow SystemsDe la EverandTemporal QOS Management in Scientific Cloud Workflow SystemsÎncă nu există evaluări
- Digital Control Engineering: Analysis and DesignDe la EverandDigital Control Engineering: Analysis and DesignEvaluare: 3 din 5 stele3/5 (1)
- Design and Test Strategies for 2D/3D Integration for NoC-based Multicore ArchitecturesDe la EverandDesign and Test Strategies for 2D/3D Integration for NoC-based Multicore ArchitecturesÎncă nu există evaluări
- LED Brightness Control Using PWM of LPC2138: ESD Lab Mini-ProjectDocument8 paginiLED Brightness Control Using PWM of LPC2138: ESD Lab Mini-ProjectAditya GadgilÎncă nu există evaluări
- Full Datasheet STi7105 PDFDocument313 paginiFull Datasheet STi7105 PDFtaxakasanÎncă nu există evaluări
- FPGA Based Stepper Motor Control Using Labview GUI TechniquesDocument5 paginiFPGA Based Stepper Motor Control Using Labview GUI TechniquesMADDYÎncă nu există evaluări
- Operating Systems CHAPTER 1 COMPLETE SOLUTION MADE BY ABHISHEK KUMARDocument9 paginiOperating Systems CHAPTER 1 COMPLETE SOLUTION MADE BY ABHISHEK KUMARAbhishemÎncă nu există evaluări
- Manual Eprom EngDocument5 paginiManual Eprom EngJames Tiberius KirkyÎncă nu există evaluări
- Configuratie LaptopDocument111 paginiConfiguratie LaptopAlex GrigorasÎncă nu există evaluări
- Instructions Set For 8085 and 8086Document15 paginiInstructions Set For 8085 and 8086Shanmugi VinayagamÎncă nu există evaluări
- Datasheet EEPROM W27C010-70 (128K)Document15 paginiDatasheet EEPROM W27C010-70 (128K)vanmarteÎncă nu există evaluări
- ATF16V8B, ATF16V8BQ, and ATF16V8BQL: FeaturesDocument27 paginiATF16V8B, ATF16V8BQ, and ATF16V8BQL: FeaturesSimilinga MnyongeÎncă nu există evaluări
- Instruction Sets: Addressing Modes and FormatsDocument13 paginiInstruction Sets: Addressing Modes and Formatsما هذا الهراءÎncă nu există evaluări
- MultiBeast Features 5.1.0Document10 paginiMultiBeast Features 5.1.0Marcia AndreaÎncă nu există evaluări
- STADocument123 paginiSTAMoon Sadia DiptheeÎncă nu există evaluări
- Ecad Lab ManualDocument55 paginiEcad Lab Manualjeravi84100% (3)
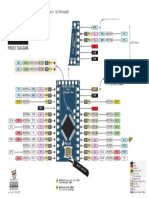
- ArduinoProMini PinoutDocument1 paginăArduinoProMini Pinout_gekidoÎncă nu există evaluări
- Clock Concurrent Opt WPDocument15 paginiClock Concurrent Opt WPkartimidÎncă nu există evaluări
- Assembly Language Programming:: 8085 Program To Add Two 8 Bit NumbersDocument9 paginiAssembly Language Programming:: 8085 Program To Add Two 8 Bit NumbersAnkit ratan pradhanÎncă nu există evaluări
- ISP1040C Intelligent SCSI Processor: Data SheetDocument4 paginiISP1040C Intelligent SCSI Processor: Data SheetKSÎncă nu există evaluări
- Digital Electronics (Register)Document30 paginiDigital Electronics (Register)Rohit MauryaÎncă nu există evaluări
- Command Line Assembly Language Programming For Arduino Tutorial 2Document10 paginiCommand Line Assembly Language Programming For Arduino Tutorial 2Kalaignan RajeshÎncă nu există evaluări
- Ica QBDocument10 paginiIca QBNaresh BopparathiÎncă nu există evaluări
- FemtoRV32 Piplined Processor ReportDocument25 paginiFemtoRV32 Piplined Processor ReportRatnakarVarunÎncă nu există evaluări
- Nr321402-Microprocessor and InterfacingDocument8 paginiNr321402-Microprocessor and InterfacingSRINIVASA RAO GANTAÎncă nu există evaluări
- 68HC11 Introduction.: Bits and BytesDocument22 pagini68HC11 Introduction.: Bits and BytesmohanaakÎncă nu există evaluări
- JOYPADDocument1 paginăJOYPADVladimir PopovicÎncă nu există evaluări
- Nintendo Entertainment System ArchitectureDocument10 paginiNintendo Entertainment System ArchitectureAlainleGuirec100% (1)
- Computer Science Notes: Computer Architecture & Fetch-Execute CycleDocument15 paginiComputer Science Notes: Computer Architecture & Fetch-Execute CycleShreyan GuptaÎncă nu există evaluări
- JaspergoldDocument20 paginiJaspergoldmuripaÎncă nu există evaluări
- TXS0102 2-Bit Bidirectional Voltage-Level Translator For Open-Drain and Push-Pull ApplicationsDocument47 paginiTXS0102 2-Bit Bidirectional Voltage-Level Translator For Open-Drain and Push-Pull Applicationskarthik4096Încă nu există evaluări