S-ar putea să vă placă și
- Classical Mechanics Notes (1 of 10)Document13 paginiClassical Mechanics Notes (1 of 10)OmegaUserÎncă nu există evaluări
- From Falling Apples to the Universe: A Guide for New Perspectives on Gravity and GravitationDe la EverandFrom Falling Apples to the Universe: A Guide for New Perspectives on Gravity and GravitationÎncă nu există evaluări
- Classical MechanicsDocument159 paginiClassical MechanicsjoniakomÎncă nu există evaluări
- Lec 1Document24 paginiLec 1sadiksnmÎncă nu există evaluări
- 12 1 What Is A Force? 1 - ? F 1 M e S 2 S F: Ma? Define AcceDocument12 pagini12 1 What Is A Force? 1 - ? F 1 M e S 2 S F: Ma? Define AcceSreedhar PugalendhiÎncă nu există evaluări
- Introduction To Basic Differential CalculusDocument11 paginiIntroduction To Basic Differential CalculusAhmed TahirÎncă nu există evaluări
- Chapter 1Document11 paginiChapter 1Fatima AbaidÎncă nu există evaluări
- Newtonian Physics IDocument97 paginiNewtonian Physics IGanesh KumarÎncă nu există evaluări
- Research Paper On Newtons Second Law of MotionDocument5 paginiResearch Paper On Newtons Second Law of Motionefecep7d100% (1)
- Maxwell's Field As Operational ConceptDocument18 paginiMaxwell's Field As Operational ConceptGeorge Mpantes mathematics teacherÎncă nu există evaluări
- C ? (From Ancient Greek: IJȫıțȣ © "Nature") Is A Natural Science That InvolvesDocument9 paginiC ? (From Ancient Greek: IJȫıțȣ © "Nature") Is A Natural Science That InvolvesMelanie Vistal MarzonÎncă nu există evaluări
- Work Energy MomentumDocument10 paginiWork Energy Momentumvivacious_appu3795Încă nu există evaluări
- Introduction To Engineering MechanicsDocument11 paginiIntroduction To Engineering MechanicsMyameSirameÎncă nu există evaluări
- Unit 1 MechanicsDocument5 paginiUnit 1 MechanicsbalkyderÎncă nu există evaluări
- INTRODUCTIONDocument15 paginiINTRODUCTIONneonprince77Încă nu există evaluări
- Math ActivityDocument2 paginiMath ActivityRegine ManaloÎncă nu există evaluări
- Physics 6210/spring 2007/lecture 1Document10 paginiPhysics 6210/spring 2007/lecture 1Sachin RaghunathanÎncă nu există evaluări
- Dynamics: CausesDocument20 paginiDynamics: CausesperwinsharmaÎncă nu există evaluări
- Chapt4Frst6Pages PDFDocument6 paginiChapt4Frst6Pages PDFmanishÎncă nu există evaluări
- Reality - Roger PenroseDocument6 paginiReality - Roger PenroseJames Scott100% (1)
- Evolution of Space-Time Structures: (Received 16 December 2005 Accepted 24 December 2005)Document15 paginiEvolution of Space-Time Structures: (Received 16 December 2005 Accepted 24 December 2005)Jaime Feliciano HernándezÎncă nu există evaluări
- Space-Time and Cosmology: Roger PenroseDocument45 paginiSpace-Time and Cosmology: Roger PenroseStefan AleksicÎncă nu există evaluări
- 01-05 Popper Kuhn and How Do We Get Laws and Theories in Science Part 2Document5 pagini01-05 Popper Kuhn and How Do We Get Laws and Theories in Science Part 2Ashish RanjanÎncă nu există evaluări
- PHYS1701AA Lecture1 UnitsOfMeasurement En4Document19 paginiPHYS1701AA Lecture1 UnitsOfMeasurement En4Raphael SevillaÎncă nu există evaluări
- The Great Void Which Is Unconditioned Fullness: One: The Expanding UniverseDocument55 paginiThe Great Void Which Is Unconditioned Fullness: One: The Expanding Universecigoffard7668Încă nu există evaluări
- Dynamics Part 1Document109 paginiDynamics Part 1Maricel Bulay-og0% (1)
- L1 Newton'sLawsDocument61 paginiL1 Newton'sLawsArafat AnikÎncă nu există evaluări
- Principle of AnalogyDocument11 paginiPrinciple of AnalogyChrisTselentisÎncă nu există evaluări
- GENERAL PHYSICS 1 Q1 Week 4 - v2 1Document19 paginiGENERAL PHYSICS 1 Q1 Week 4 - v2 1vrejie46Încă nu există evaluări
- Implications of The Non-Existence of TimeDocument8 paginiImplications of The Non-Existence of TimelovescioÎncă nu există evaluări
- Common MisconceptionsDocument15 paginiCommon MisconceptionsandarhutagalungÎncă nu există evaluări
- Chapter DDocument14 paginiChapter DTerra DrakeÎncă nu există evaluări
- Statics and Dynamics Dr. Mahesh V. Panchagnula Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 02 Newton's LawsDocument6 paginiStatics and Dynamics Dr. Mahesh V. Panchagnula Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 02 Newton's LawsDharmendra JainÎncă nu există evaluări
- The Philosophy of Mass in Modern PhysicsDocument8 paginiThe Philosophy of Mass in Modern Physicsinoydevil2100% (1)
- What Is The Meaning of The Wave Function?Document20 paginiWhat Is The Meaning of The Wave Function?nÎncă nu există evaluări
- 2010 The Definition of Mach's PrincipleDocument22 pagini2010 The Definition of Mach's PrincipleWI TOÎncă nu există evaluări
- A Three Step Program For Return To Reality in Physics: Paul J. WerbosDocument19 paginiA Three Step Program For Return To Reality in Physics: Paul J. WerbosPaul Werbos100% (1)
- The Simple Essence of Dewey B. Larson's Reciprocal System of Physics (Boardman, Jameela) PDFDocument10 paginiThe Simple Essence of Dewey B. Larson's Reciprocal System of Physics (Boardman, Jameela) PDF潘浩Încă nu există evaluări
- The Simple Essence of Dewey B. Larson's Reciprocal System of Physics (Boardman, Jameela)Document10 paginiThe Simple Essence of Dewey B. Larson's Reciprocal System of Physics (Boardman, Jameela)icanadaaÎncă nu există evaluări
- Laws of MotionDocument7 paginiLaws of MotionJeya Plays YTÎncă nu există evaluări
- The Invariance of Spacetime IntervalDocument11 paginiThe Invariance of Spacetime IntervalGeorge Mpantes mathematics teacherÎncă nu există evaluări
- Session 1 Introduction To Theoretical PhysicsDocument13 paginiSession 1 Introduction To Theoretical PhysicsGeorge HrabovskyÎncă nu există evaluări
- Newton's Laws & His System of The World: Part CDocument53 paginiNewton's Laws & His System of The World: Part CAkhmadTaufikIsmailÎncă nu există evaluări
- Journal of Philosophy, IncDocument18 paginiJournal of Philosophy, Inclevinas71Încă nu există evaluări
- Kepler, Newton, and Laws of MotionDocument15 paginiKepler, Newton, and Laws of MotionwonrfalfaÎncă nu există evaluări
- String Theory Vs Loop Quantum GravityDocument9 paginiString Theory Vs Loop Quantum Gravityapi-241908559Încă nu există evaluări
- Kozyrev - Time Is A Mystery of The UniverseDocument3 paginiKozyrev - Time Is A Mystery of The UniverseHéctor Peña100% (2)
- PHYS1160Document17 paginiPHYS1160supÎncă nu există evaluări
- Dynamics Chapter 2009-05-13Document20 paginiDynamics Chapter 2009-05-13Boldie LutwigÎncă nu există evaluări
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, MadrasDocument21 paginiAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, MadrasabimanaÎncă nu există evaluări
- Approach of PhysicistDocument6 paginiApproach of PhysicistArun PallisseriÎncă nu există evaluări
- Module 1 - Lesson 1-3 Invariance of Physical Law, Relativity of Simultenity and Relativity of Time IntervalDocument14 paginiModule 1 - Lesson 1-3 Invariance of Physical Law, Relativity of Simultenity and Relativity of Time IntervalZarina SalesÎncă nu există evaluări
- Module 1 - Lesson 1-3 Invariance of Physical Law, Relativity of Simultenity and Relativity of Time Interval-CombinedDocument51 paginiModule 1 - Lesson 1-3 Invariance of Physical Law, Relativity of Simultenity and Relativity of Time Interval-CombinedZarina SalesÎncă nu există evaluări
- Phy-3 Mod1Document28 paginiPhy-3 Mod1Fattah AbuÎncă nu există evaluări
- A Brief History of Time Summary and ReviewDocument12 paginiA Brief History of Time Summary and ReviewEda Can KarabalÎncă nu există evaluări
- Dynamics of Physical Systems - Lec03Document18 paginiDynamics of Physical Systems - Lec03rdsrajÎncă nu există evaluări
- Module 2 - ForcesDocument13 paginiModule 2 - Forcesnaioki69Încă nu există evaluări
- T60 Transformer Management Relay: UR Series Instruction ManualDocument404 paginiT60 Transformer Management Relay: UR Series Instruction Manualeng amadaÎncă nu există evaluări
- Sony SDM-N50R PDFDocument76 paginiSony SDM-N50R PDFFöldi BélaÎncă nu există evaluări
- Nama: Ketut Dian Caturini NIM: 1813011007 Kelas: 7B Tugas 2Document3 paginiNama: Ketut Dian Caturini NIM: 1813011007 Kelas: 7B Tugas 2Sri AgustiniÎncă nu există evaluări
- FMC - Novolastic Subsea Thermal Insulation - LOW RESDocument3 paginiFMC - Novolastic Subsea Thermal Insulation - LOW RESalphading50% (2)
- Acoustical Materials 2.0Document16 paginiAcoustical Materials 2.0anuragÎncă nu există evaluări
- 50TPD Soybean Oil Batch Type Solvent Extraction PlantDocument4 pagini50TPD Soybean Oil Batch Type Solvent Extraction PlantKenan KardasÎncă nu există evaluări
- SeqP&D GPL Met enDocument52 paginiSeqP&D GPL Met enSriram ChÎncă nu există evaluări
- Infinera 7100 Series: Compact and Flexible Packet Optical Transport For The MetroDocument2 paginiInfinera 7100 Series: Compact and Flexible Packet Optical Transport For The MetroTaha AlhatmiÎncă nu există evaluări
- Soal ElectrochemistryDocument3 paginiSoal ElectrochemistryHerlinda OktaÎncă nu există evaluări
- Fiitjee Fiitjee Fiitjee Fiitjee: Fortnightly Assessment QuizDocument8 paginiFiitjee Fiitjee Fiitjee Fiitjee: Fortnightly Assessment QuizIshaan BagaiÎncă nu există evaluări
- An Ecient Uniform-Cost Normalized Edit Distance AlgorithmDocument12 paginiAn Ecient Uniform-Cost Normalized Edit Distance Algorithmanon-75650Încă nu există evaluări
- APCO Air Valve 613Document4 paginiAPCO Air Valve 613jones0055Încă nu există evaluări
- Sociology ZulfiqarDocument31 paginiSociology ZulfiqarHasnain HilbiÎncă nu există evaluări
- Field Report of Attock-Cherat Range PDFDocument6 paginiField Report of Attock-Cherat Range PDFAslam KhanÎncă nu există evaluări
- Three-Dimensional Lithium-Ion Battery ModelDocument35 paginiThree-Dimensional Lithium-Ion Battery ModelmortezagashtiÎncă nu există evaluări
- Maquinaria Forestal..Document14 paginiMaquinaria Forestal..Juan G ContrerasÎncă nu există evaluări
- Change ManDocument17 paginiChange Mansrikanth9gannuÎncă nu există evaluări
- Rules, Scripts and BeanshellDocument7 paginiRules, Scripts and BeanshelltgudyktzxÎncă nu există evaluări
- Fpls 12 764103Document10 paginiFpls 12 764103Pawan MishraÎncă nu există evaluări
- 1 s2.0 S0263876299718186 Main PDFDocument7 pagini1 s2.0 S0263876299718186 Main PDFLeydi PatiñoÎncă nu există evaluări
- Konfigurimi 02 - SkylightDocument3 paginiKonfigurimi 02 - Skylightismet mehmetiÎncă nu există evaluări
- Seminar, Workshop, ConferenceDocument30 paginiSeminar, Workshop, ConferenceMutharasu SÎncă nu există evaluări
- Estimation of Microbial GrowthDocument25 paginiEstimation of Microbial GrowthziaiitdÎncă nu există evaluări
- Converting CLOBs 2 VARCHARDocument15 paginiConverting CLOBs 2 VARCHARMa GicÎncă nu există evaluări
- RO400FC RO300FC Specifications - V3.2Document6 paginiRO400FC RO300FC Specifications - V3.2bogdantn98Încă nu există evaluări
- Binomial Poisson Normal DistributionDocument9 paginiBinomial Poisson Normal DistributionFahim MahmudÎncă nu există evaluări
- Exercise 2Document4 paginiExercise 2Ir Fik TÎncă nu există evaluări
- Defects in Stainless SteelDocument31 paginiDefects in Stainless SteelPrabhakar Kattula80% (5)
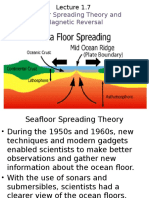
- Seafloor Spreading TheoryDocument16 paginiSeafloor Spreading TheoryMark Anthony Evangelista Cabrieto100% (1)
- ABB MNS IAC Additional Test ReportDocument14 paginiABB MNS IAC Additional Test ReportSheik100% (1)
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeDe la EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticeEvaluare: 4 din 5 stele4/5 (2)
- Mental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)De la EverandMental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)Încă nu există evaluări
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsDe la EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsEvaluare: 4.5 din 5 stele4.5/5 (3)
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormDe la EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormEvaluare: 5 din 5 stele5/5 (5)
- Build a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.De la EverandBuild a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Evaluare: 5 din 5 stele5/5 (1)
- Images of Mathematics Viewed Through Number, Algebra, and GeometryDe la EverandImages of Mathematics Viewed Through Number, Algebra, and GeometryÎncă nu există evaluări
- Interactive Math Notebook Resource Book, Grade 6De la EverandInteractive Math Notebook Resource Book, Grade 6Încă nu există evaluări
- Calculus Workbook For Dummies with Online PracticeDe la EverandCalculus Workbook For Dummies with Online PracticeEvaluare: 3.5 din 5 stele3.5/5 (8)
- Mental Math Secrets - How To Be a Human CalculatorDe la EverandMental Math Secrets - How To Be a Human CalculatorEvaluare: 5 din 5 stele5/5 (3)
- ParaPro Assessment Preparation 2023-2024: Study Guide with 300 Practice Questions and Answers for the ETS Praxis Test (Paraprofessional Exam Prep)De la EverandParaPro Assessment Preparation 2023-2024: Study Guide with 300 Practice Questions and Answers for the ETS Praxis Test (Paraprofessional Exam Prep)Încă nu există evaluări
- Mathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingDe la EverandMathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingEvaluare: 4.5 din 5 stele4.5/5 (21)
- A Guide to Success with Math: An Interactive Approach to Understanding and Teaching Orton Gillingham MathDe la EverandA Guide to Success with Math: An Interactive Approach to Understanding and Teaching Orton Gillingham MathEvaluare: 5 din 5 stele5/5 (1)
- How Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsDe la EverandHow Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsEvaluare: 3.5 din 5 stele3.5/5 (9)
- Fluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldDe la EverandFluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldEvaluare: 3 din 5 stele3/5 (80)