S-ar putea să vă placă și
- Advanced Control of AC / DC Power Networks: System of Systems Approach Based on Spatio-temporal ScalesDe la EverandAdvanced Control of AC / DC Power Networks: System of Systems Approach Based on Spatio-temporal ScalesÎncă nu există evaluări
- Lab 6 DC Motor - v02Document4 paginiLab 6 DC Motor - v02Hall Des Polymères PollusmerosÎncă nu există evaluări
- Smps InverterDocument5 paginiSmps Invertersami_yÎncă nu există evaluări
- Experiment 7Document14 paginiExperiment 7Mizhar GerardoÎncă nu există evaluări
- Project Report On Robotic ArmDocument28 paginiProject Report On Robotic Armpatel ketan84% (25)
- MSD Exp2Document5 paginiMSD Exp2ngolos247Încă nu există evaluări
- DC Motor Speed ControlDocument7 paginiDC Motor Speed ControlBiyadglgne Eskezia AyalewÎncă nu există evaluări
- Speed and Control of DC Motors PDF BookDocument12 paginiSpeed and Control of DC Motors PDF BookakylpuMEÎncă nu există evaluări
- Hobby Servo Motor Control Via PIC Pulse Width Modulation: Nathan Markey April 4, 2003Document7 paginiHobby Servo Motor Control Via PIC Pulse Width Modulation: Nathan Markey April 4, 2003Luciana Gutierrez Salazar100% (1)
- Subject: Student: Practice Name: Digital Systems 2Document2 paginiSubject: Student: Practice Name: Digital Systems 2Yamil López PérezÎncă nu există evaluări
- How To Interface A Microchip PIC MCU With A Hobby RC Servo, Paulo E. MerlotiDocument18 paginiHow To Interface A Microchip PIC MCU With A Hobby RC Servo, Paulo E. MerlotiMarco Medina100% (1)
- Simulation and Design of A Waveform Generator Based On DDS TechnologyDocument7 paginiSimulation and Design of A Waveform Generator Based On DDS TechnologyMounith HÎncă nu există evaluări
- Simulation and Design of A Waveform Generator Based On DDS TechnologyDocument7 paginiSimulation and Design of A Waveform Generator Based On DDS TechnologyMounith HÎncă nu există evaluări
- Microchip CLC DescriptionDocument12 paginiMicrochip CLC DescriptionKamlesh YadavÎncă nu există evaluări
- Electric Motor: Project DescriptionDocument20 paginiElectric Motor: Project DescriptionAllen LeeÎncă nu există evaluări
- Table of Content S.No Page No.: I 1.1 Conventional Methods of Speed Control 4Document17 paginiTable of Content S.No Page No.: I 1.1 Conventional Methods of Speed Control 4Janani JanuÎncă nu există evaluări
- Literature Review DC MotorDocument24 paginiLiterature Review DC MotorXtremeInfosoftAlwar59% (17)
- PLC Manual FinalDocument32 paginiPLC Manual FinalMuhammad Usama Muhammad SaleemÎncă nu există evaluări
- Microcontroller Based DC Motor Speed Control Using PWM TechniqueDocument5 paginiMicrocontroller Based DC Motor Speed Control Using PWM Techniquelovely personÎncă nu există evaluări
- "Speed Control of DC Motor by Using PWM": IjarcceDocument3 pagini"Speed Control of DC Motor by Using PWM": IjarcceRishi GaddaÎncă nu există evaluări
- Microcontroller Based DC Motor Speed Control Using PWM TechniqueDocument5 paginiMicrocontroller Based DC Motor Speed Control Using PWM TechniqueJigar PatelÎncă nu există evaluări
- DC Motor Control ExpDocument6 paginiDC Motor Control Expvijesh_anna100% (1)
- DC Motor Speed Control Using Pulse Width Modulation (PWM)Document30 paginiDC Motor Speed Control Using Pulse Width Modulation (PWM)अमरेश झाÎncă nu există evaluări
- DC Motor Bidirectional Speed Control Using PWM - Eproject - pdf1Document3 paginiDC Motor Bidirectional Speed Control Using PWM - Eproject - pdf1moises quispe0% (1)
- 2020 IC Design Contest: Full-Custom CategoryDocument6 pagini2020 IC Design Contest: Full-Custom CategoryE94086018陳寧文Încă nu există evaluări
- AN957 - dsPIC33FJ12MC202 VersionDocument3 paginiAN957 - dsPIC33FJ12MC202 VersiontedozallennÎncă nu există evaluări
- WK 214modDocument90 paginiWK 214modadusumilliabhishekÎncă nu există evaluări
- Arm Cortex (LPC 2148) Based Motor Speed ControlDocument25 paginiArm Cortex (LPC 2148) Based Motor Speed ControlUday Wankar100% (1)
- Eee312 Eee282 Lab7 Spring2015Document6 paginiEee312 Eee282 Lab7 Spring2015vognarÎncă nu există evaluări
- L7. PIC16F877:ADC MODULE: Lab Notes 7 Mechatronics Lecture Notes by Dr. Can U. DogruerDocument3 paginiL7. PIC16F877:ADC MODULE: Lab Notes 7 Mechatronics Lecture Notes by Dr. Can U. DogruerDomingo Dominguez GonzalezÎncă nu există evaluări
- Exp 2 FinalDocument7 paginiExp 2 FinalRahul Sehgal100% (1)
- PROJECT Mislestone 1Document8 paginiPROJECT Mislestone 1Kirankumar ReddyÎncă nu există evaluări
- SVAR Power FactorDocument5 paginiSVAR Power FactorRyan HarrisÎncă nu există evaluări
- 05 - DC Motor Control Using PLCDocument49 pagini05 - DC Motor Control Using PLCKoppoju PadmaÎncă nu există evaluări
- Chap 4Document63 paginiChap 4IbrahimÎncă nu există evaluări
- 1.R, RC, UJT FiringDocument34 pagini1.R, RC, UJT Firingmanoj0% (1)
- Railway Accident Monitoring System: A Project Report ONDocument13 paginiRailway Accident Monitoring System: A Project Report ONPrateek SrivastavÎncă nu există evaluări
- Team 4 Technical ReportDocument12 paginiTeam 4 Technical Reportabdelrahmanmoataz0Încă nu există evaluări
- Microcontroller Based DC Motor Control: Jayshree Sahu, S.K.Sahu, Jayendra KumarDocument4 paginiMicrocontroller Based DC Motor Control: Jayshree Sahu, S.K.Sahu, Jayendra KumarJagdish PatankarÎncă nu există evaluări
- Report Ver 2Document44 paginiReport Ver 2Geralt VesemirÎncă nu există evaluări
- DC Motor ControlDocument16 paginiDC Motor Controlthatchaphan norkhamÎncă nu există evaluări
- Dual BLDC Motor Driver For Arm of Humanoid Robot MARKODocument5 paginiDual BLDC Motor Driver For Arm of Humanoid Robot MARKOsunwheelÎncă nu există evaluări
- Solar Powered Speed Control of Brushless DC MotorDocument7 paginiSolar Powered Speed Control of Brushless DC MotorIJRASETPublicationsÎncă nu există evaluări
- Controlling DC Motor Using Microcontroller (PIC16F72) With PWMDocument4 paginiControlling DC Motor Using Microcontroller (PIC16F72) With PWMAkah PreciousÎncă nu există evaluări
- 273-Article Text-474-1-10-20171230Document5 pagini273-Article Text-474-1-10-20171230Jinsha CÎncă nu există evaluări
- EE2016 Micropprocessor Lab & Theory July-Nov 2019Document7 paginiEE2016 Micropprocessor Lab & Theory July-Nov 2019Raghu DineshÎncă nu există evaluări
- BLDC Motor DriverDocument6 paginiBLDC Motor DriverjpmacabascoÎncă nu există evaluări
- User Manual SmartElex 15S DC Motor Driver 15A 30A PeakDocument14 paginiUser Manual SmartElex 15S DC Motor Driver 15A 30A PeakRakesh KurhadeÎncă nu există evaluări
- MP Electrical Drives Lab ManualDocument37 paginiMP Electrical Drives Lab ManualSoumiya Srinivasan100% (1)
- Electrical Engineering Department Academic SessionDocument17 paginiElectrical Engineering Department Academic SessionShavitra 30Încă nu există evaluări
- Microcontroller Based DC Motor Speed Control Using PWM TechniqueDocument5 paginiMicrocontroller Based DC Motor Speed Control Using PWM TechniqueswetaÎncă nu există evaluări
- Design and Implementation of Single Phase InverterDocument5 paginiDesign and Implementation of Single Phase InverterVatteVineethÎncă nu există evaluări
- In-Circuit Serial Programming - Picmicro Mid-Range Mcu Family PDFDocument14 paginiIn-Circuit Serial Programming - Picmicro Mid-Range Mcu Family PDFMauro Vargas100% (2)
- CS328 DSPDocument4 paginiCS328 DSPMohammed BenbrahimÎncă nu există evaluări
- Erii21 Motor Control PWMDocument12 paginiErii21 Motor Control PWMpallinalvitesÎncă nu există evaluări
- A Project Report On PLC and Its ApplicationDocument27 paginiA Project Report On PLC and Its ApplicationPriyanshu SuryavanshiÎncă nu există evaluări
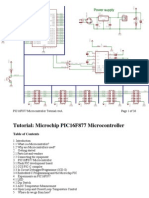
- PIC16F877 Microcontroller TutorialDocument37 paginiPIC16F877 Microcontroller Tutorialmc_prayer100% (4)
- Four Quadrant Speed Control of DC Motor With The Help of AT89S52 MicrocontrollerDocument12 paginiFour Quadrant Speed Control of DC Motor With The Help of AT89S52 MicrocontrollerpriyaÎncă nu există evaluări
- Lecture 24Document2 paginiLecture 24Asghar AliÎncă nu există evaluări
- 1 TransmissionDocument10 pagini1 TransmissionEsmeralda TapizÎncă nu există evaluări
- Backstepping PaperDocument3 paginiBackstepping PapermxjoeÎncă nu există evaluări
- 24 Feedback LinearizationDocument17 pagini24 Feedback LinearizationaustinvishalÎncă nu există evaluări
- Fuel Burn UpDocument53 paginiFuel Burn UpAsghar AliÎncă nu există evaluări
- Sliding Mode ControlDocument14 paginiSliding Mode ControlAsghar AliÎncă nu există evaluări
- Sliding Mode Control GuideDocument15 paginiSliding Mode Control GuideShouvik ChaudhuriÎncă nu există evaluări
- Atcs PDFDocument12 paginiAtcs PDFAsghar AliÎncă nu există evaluări
- An Open Source Power System Analysis Toolbox: 7% (%#/#,) "3 ? @AB A@C AD@Document56 paginiAn Open Source Power System Analysis Toolbox: 7% (%#/#,) "3 ? @AB A@C AD@Chandan KumarÎncă nu există evaluări
- PS Protection ManualDocument32 paginiPS Protection ManualMandip PokharelÎncă nu există evaluări
- A Review of Process Fault Detection and Diagnosis Part I Quantitative Model-Based Methods (2003, Venkat Venkatasubramanian, Raghunathan Rengaswamy, Kewen Yin, Surya N. Kavuri)Document19 paginiA Review of Process Fault Detection and Diagnosis Part I Quantitative Model-Based Methods (2003, Venkat Venkatasubramanian, Raghunathan Rengaswamy, Kewen Yin, Surya N. Kavuri)Rogelio16Încă nu există evaluări
- PID Without A PHDDocument7 paginiPID Without A PHDEEpro808Încă nu există evaluări
- Chapter 07Document24 paginiChapter 07Asghar AliÎncă nu există evaluări
- PID Control System Analysis and DesignDocument48 paginiPID Control System Analysis and DesignAsghar AliÎncă nu există evaluări
- PD, PI, PID Compensation: M. Sami Fadali Professor of Electrical Engineering University of NevadaDocument42 paginiPD, PI, PID Compensation: M. Sami Fadali Professor of Electrical Engineering University of NevadaAsghar AliÎncă nu există evaluări
- Pelvic Inflammatory Disease (PID)Document43 paginiPelvic Inflammatory Disease (PID)Asghar AliÎncă nu există evaluări
- PIDtutorialDocument13 paginiPIDtutorialalijnubyÎncă nu există evaluări
- Advanced Embedded Systems DesignDocument14 paginiAdvanced Embedded Systems DesignAsghar AliÎncă nu există evaluări
- Applied Nonlinear ControlDocument219 paginiApplied Nonlinear ControlFlyfy David71% (7)
- Strain Gage AccelerometerDocument5 paginiStrain Gage AccelerometerAsghar AliÎncă nu există evaluări
- New Approaches To The Design of Fixed Order Controllers: S. P. Bhattacharyya Department of Electrical EngineeringDocument71 paginiNew Approaches To The Design of Fixed Order Controllers: S. P. Bhattacharyya Department of Electrical EngineeringAsghar AliÎncă nu există evaluări
- Chapter 10 PID 1Document36 paginiChapter 10 PID 1Taufiq GalangÎncă nu există evaluări
- Practical Guide To AccelerometersDocument3 paginiPractical Guide To AccelerometersShelton Raja100% (1)
- Measurements SystemDocument22 paginiMeasurements SystemM Rizal Dwi F0% (3)
- Discrete MathematicsDocument5 paginiDiscrete MathematicsAsghar AliÎncă nu există evaluări
- Switching RegulatorDocument6 paginiSwitching RegulatorAsghar AliÎncă nu există evaluări
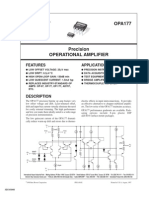
- Opa 177Document11 paginiOpa 177Asghar AliÎncă nu există evaluări
- Impedance Measuring CircuitsDocument7 paginiImpedance Measuring CircuitsAsghar AliÎncă nu există evaluări
- Capacitive SensorDocument17 paginiCapacitive SensorPaul Jazz Lopez100% (1)