S-ar putea să vă placă și
- Controlling of An Under-Actuated Quadrotor UAV Equipped With A ManipulatorDocument11 paginiControlling of An Under-Actuated Quadrotor UAV Equipped With A ManipulatorJoe ReninÎncă nu există evaluări
- ISA Transactions: M. Rida Mokhtari, Brahim CherkiDocument16 paginiISA Transactions: M. Rida Mokhtari, Brahim CherkiSaad HadjiÎncă nu există evaluări
- Local+Govt+Showcase DronesDocument5 paginiLocal+Govt+Showcase DronesProfessorArsalÎncă nu există evaluări
- V Tail MAV ReportDocument46 paginiV Tail MAV ReportRodriguez ArthursÎncă nu există evaluări
- Adaptive Neural Motion Control of A QuadrotorDocument23 paginiAdaptive Neural Motion Control of A Quadrotorjos romÎncă nu există evaluări
- IJEAT2017FVUAVDocument7 paginiIJEAT2017FVUAVDr.SUNI MARY VARGHESEÎncă nu există evaluări
- Robust Attitude Control of Helicopters With Actuator Dynamics Using Neural NetworksDocument18 paginiRobust Attitude Control of Helicopters With Actuator Dynamics Using Neural NetworksAbdallah Omar Al AyoubiÎncă nu există evaluări
- Submit Stencil: Advances in Unmanned Aerial Vehicles TechnologiesDocument13 paginiSubmit Stencil: Advances in Unmanned Aerial Vehicles TechnologiesÜmit Müfit GüzeyÎncă nu există evaluări
- Adaptive Backstepping Ight Control For A mini-UAVDocument18 paginiAdaptive Backstepping Ight Control For A mini-UAVoussama sadkiÎncă nu există evaluări
- Vtol Design PDFDocument25 paginiVtol Design PDFElner CrystianÎncă nu există evaluări
- Dynamic Modeling and Control Techniques For A Quadrotor: January 2015Document10 paginiDynamic Modeling and Control Techniques For A Quadrotor: January 2015Naier NabilÎncă nu există evaluări
- 2009 Guidance - and - Nonlinear - Control - System - FoDocument24 pagini2009 Guidance - and - Nonlinear - Control - System - FoabredulebreÎncă nu există evaluări
- 2019 - Attitude and Cruise Control of A VTOL Tiltwing UAVDocument8 pagini2019 - Attitude and Cruise Control of A VTOL Tiltwing UAVahmad.yasser123456Încă nu există evaluări
- An Integral Predictive Nonlinear HinfiniDocument12 paginiAn Integral Predictive Nonlinear HinfinigabrielberthoÎncă nu există evaluări
- Control and Navigation System For A Fixed-Wing Unmanned Aerial VehicleDocument11 paginiControl and Navigation System For A Fixed-Wing Unmanned Aerial VehicleJU EE 2021Încă nu există evaluări
- Advances in Unmanned Aerial Vehicles TechnologiesDocument14 paginiAdvances in Unmanned Aerial Vehicles TechnologiesNAENWI YAABARIÎncă nu există evaluări
- Design and Analysis of An Unmaaned Aerial VehicleDocument8 paginiDesign and Analysis of An Unmaaned Aerial VehicleDeb PradhanÎncă nu există evaluări
- Boeing PBN OperationsDocument10 paginiBoeing PBN Operationslubat2011100% (5)
- Enhanced Backstepping Controller Design With ApplicationDocument27 paginiEnhanced Backstepping Controller Design With ApplicationmohammedÎncă nu există evaluări
- Modeling and Controlling of Quadrotor Aerial Vehicle Equipped With A GripperDocument11 paginiModeling and Controlling of Quadrotor Aerial Vehicle Equipped With A GripperАртем РябиновÎncă nu există evaluări
- Heba ElKholy Thesis S2014Document13 paginiHeba ElKholy Thesis S2014AlexandraAndreeaÎncă nu există evaluări
- Aerodynamics and Control of Autonomous Quadrotor Helicopters in Aggressive ManeuveringDocument6 paginiAerodynamics and Control of Autonomous Quadrotor Helicopters in Aggressive ManeuveringtiagopnÎncă nu există evaluări
- Adaptive Sliding Mode Control For Attitude and Altitude System of A Quadcopter UAV Via Neural NetworkDocument10 paginiAdaptive Sliding Mode Control For Attitude and Altitude System of A Quadcopter UAV Via Neural Networkdelima palwa sariÎncă nu există evaluări
- Control and Navigation System For A Fixed-Wing Unmanned Aerial VehicleDocument11 paginiControl and Navigation System For A Fixed-Wing Unmanned Aerial VehicleAfif PradhanaÎncă nu există evaluări
- Text of AeroDocument9 paginiText of Aerokilicalemdar883Încă nu există evaluări
- Autonomous Quadcopter Precision Landing Onto A Heaving Platform New Method and ExperimentDocument11 paginiAutonomous Quadcopter Precision Landing Onto A Heaving Platform New Method and Experiment20151312Încă nu există evaluări
- Real-Time Indoor Autonomous Vehicle Test Environment PDFDocument14 paginiReal-Time Indoor Autonomous Vehicle Test Environment PDFPiyush Kumar DongreÎncă nu există evaluări
- Z0299 PDFDocument6 paginiZ0299 PDFCarlos RamosÎncă nu există evaluări
- Wireless Controlled Quad-CopterDocument8 paginiWireless Controlled Quad-CopternamithamahaleÎncă nu există evaluări
- A442014 074Document8 paginiA442014 074mikotorifky100% (1)
- Drones 07 00580 v2Document19 paginiDrones 07 00580 v2saumya irugalbandaraÎncă nu există evaluări
- Robust Attitude Control of An Agile Aircraft UsingDocument17 paginiRobust Attitude Control of An Agile Aircraft UsingshahÎncă nu există evaluări
- 10 - Artigo An Integral Predictivenonlinear H Control Structure For A - RaffoDocument11 pagini10 - Artigo An Integral Predictivenonlinear H Control Structure For A - RaffoRafael Monteiro SouzaÎncă nu există evaluări
- Flight Validation of Downlinked Flight Management System 4D TrajectoryDocument10 paginiFlight Validation of Downlinked Flight Management System 4D TrajectorysanjuÎncă nu există evaluări
- Paper DLRK2017 Temme Trempler UAV Into Airport OperationsDocument11 paginiPaper DLRK2017 Temme Trempler UAV Into Airport OperationsOlanrewaju EmmanuelÎncă nu există evaluări
- Design and Implementation of A Nonlinear Flight Control Law For The Yaw Channel of A UAV HelicopterDocument6 paginiDesign and Implementation of A Nonlinear Flight Control Law For The Yaw Channel of A UAV HelicopterAbdallah Omar Al AyoubiÎncă nu există evaluări
- BICOPTERDocument22 paginiBICOPTERManideep Ananthula100% (4)
- Obstacle Avoidance For Unmanned Aerial Vehicles: Gonçalo Charters Santos Cruz Pedro Miguel Martins EncarnaçãoDocument15 paginiObstacle Avoidance For Unmanned Aerial Vehicles: Gonçalo Charters Santos Cruz Pedro Miguel Martins EncarnaçãoCraneo LocoÎncă nu există evaluări
- ISA Transactions: M. Rida Mokhtari, Amal Choukchou Braham, Brahim CherkiDocument14 paginiISA Transactions: M. Rida Mokhtari, Amal Choukchou Braham, Brahim CherkiSaad HadjiÎncă nu există evaluări
- A Deep Reinforcement Learning Control Approach For High-Performance AircraftDocument41 paginiA Deep Reinforcement Learning Control Approach For High-Performance AircraftDavood AsadihendoustaniÎncă nu există evaluări
- Project Dynamic Modelling and Simulation of A Quadrotor For A Predefined TrajectoryDocument19 paginiProject Dynamic Modelling and Simulation of A Quadrotor For A Predefined TrajectorySidharth Suresh KumarÎncă nu există evaluări
- Quadrotor Helicopter Flight Dynamics and Control: Theory and ExperimentDocument17 paginiQuadrotor Helicopter Flight Dynamics and Control: Theory and ExperimentAngel ChicchonÎncă nu există evaluări
- 148 PDFDocument8 pagini148 PDFAAS SHÎncă nu există evaluări
- 1 s2.0 S026322411730324X MainDocument14 pagini1 s2.0 S026322411730324X MainSanika RasalÎncă nu există evaluări
- 1 s2.0 S1270963815002679 MainDocument7 pagini1 s2.0 S1270963815002679 MainIslem TlbÎncă nu există evaluări
- Trajectory Path Control of Multiple Unmanned Aerial VehiclesDocument4 paginiTrajectory Path Control of Multiple Unmanned Aerial VehiclesdormentryÎncă nu există evaluări
- 4 - Improved Altitude Control Algorithm For Quadcopter Unmanned Aerial Vehicles PDFDocument15 pagini4 - Improved Altitude Control Algorithm For Quadcopter Unmanned Aerial Vehicles PDFusmancheema81Încă nu există evaluări
- Control and Estimation of A Quadcopter Dynamical MDocument14 paginiControl and Estimation of A Quadcopter Dynamical MmahendranavionicsÎncă nu există evaluări
- Nonlinear Adaptive Flight Control Using Neural NetworksDocument24 paginiNonlinear Adaptive Flight Control Using Neural NetworksAria IraniÎncă nu există evaluări
- Synopsis QuadcopterDocument10 paginiSynopsis QuadcopterNamithaMahaleÎncă nu există evaluări
- A Trajectory Tracking Control Design For Fixed-Wing Unmanned Aerial VehiclesDocument6 paginiA Trajectory Tracking Control Design For Fixed-Wing Unmanned Aerial Vehicleselguerrero66Încă nu există evaluări
- Aeroservoelastic Modeling, Analysis, and Design Techniques PDFDocument12 paginiAeroservoelastic Modeling, Analysis, and Design Techniques PDFkarthekeyanmenonÎncă nu există evaluări
- A New Hybrid Control Scheme For An Integrated Helicopter and Engine SystemDocument13 paginiA New Hybrid Control Scheme For An Integrated Helicopter and Engine SystemDr MechanicaÎncă nu există evaluări
- Refer For UwashseattleDocument7 paginiRefer For UwashseattleYash OzaÎncă nu există evaluări
- Morphing Concepts For UAVsDocument8 paginiMorphing Concepts For UAVstyroneÎncă nu există evaluări
- Automatic Path Planning and Control Design For AutonomousDocument6 paginiAutomatic Path Planning and Control Design For AutonomousNAENWI YAABARIÎncă nu există evaluări
- HILSDocument8 paginiHILSsakthi ambroseÎncă nu există evaluări
- Approximation-Based Control of Uncertain Helicopter DynamicsDocument16 paginiApproximation-Based Control of Uncertain Helicopter DynamicsmeropeatlaÎncă nu există evaluări
- Small Unmanned Aircraft: Theory and PracticeDe la EverandSmall Unmanned Aircraft: Theory and PracticeEvaluare: 4.5 din 5 stele4.5/5 (2)
- Nonlinear Kalman Filter for Multi-Sensor Navigation of Unmanned Aerial Vehicles: Application to Guidance and Navigation of Unmanned Aerial Vehicles Flying in a Complex EnvironmentDe la EverandNonlinear Kalman Filter for Multi-Sensor Navigation of Unmanned Aerial Vehicles: Application to Guidance and Navigation of Unmanned Aerial Vehicles Flying in a Complex EnvironmentÎncă nu există evaluări
- Attitude Control of A QuadrotorDocument6 paginiAttitude Control of A QuadrotorGhada BeydounÎncă nu există evaluări
- Formation Flight of Two Autonomous Blimps: Jasper Van de Loo DCT 2007.130Document105 paginiFormation Flight of Two Autonomous Blimps: Jasper Van de Loo DCT 2007.130Ghada BeydounÎncă nu există evaluări
- (Project) Modelling and Control of Autonomous QuadrotorDocument149 pagini(Project) Modelling and Control of Autonomous QuadrotorBenazir Fathia100% (1)
- Hybrid PID LQ Quadrotor ControllerDocument14 paginiHybrid PID LQ Quadrotor ControllerGhada BeydounÎncă nu există evaluări
- Mycopter: Enabling Technologies For Personal Air Transport SystemsDocument15 paginiMycopter: Enabling Technologies For Personal Air Transport SystemsGhada BeydounÎncă nu există evaluări
- Colgan Air Flight 3407Document2 paginiColgan Air Flight 3407Albert RiosÎncă nu există evaluări
- Avoiding Unstable Approaches Important Tips For AtcoDocument2 paginiAvoiding Unstable Approaches Important Tips For AtcoArjan MukherjeeÎncă nu există evaluări
- IFR Alternates Guide ChartDocument1 paginăIFR Alternates Guide Chartchristopher6d.6hanÎncă nu există evaluări
- Lebl ChartsDocument120 paginiLebl ChartsUnited Aviation Cristobal Garcia KingÎncă nu există evaluări
- 1947-82 Beech V-Tail BonanzaDocument11 pagini1947-82 Beech V-Tail BonanzasandyÎncă nu există evaluări
- Unit 8 Role of DGCA/BCAS in Aviation Safety and SecurityDocument7 paginiUnit 8 Role of DGCA/BCAS in Aviation Safety and Securityrathneshkumar100% (2)
- Chuong 3Document149 paginiChuong 3nguyenÎncă nu există evaluări
- Final OutputDocument114 paginiFinal OutputpallaÎncă nu există evaluări
- CPL Meteorology Manual PDFDocument7 paginiCPL Meteorology Manual PDFRaveena Sharma100% (1)
- Aerospace CompaniesDocument1 paginăAerospace Companiesarmon_domingoÎncă nu există evaluări
- Cessna 152 Weight and Balance SheetDocument1 paginăCessna 152 Weight and Balance SheetAntonio Moises FreireÎncă nu există evaluări
- King KLN-90A Pilots ManualDocument173 paginiKing KLN-90A Pilots ManualFlyForFunÎncă nu există evaluări
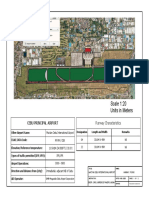
- Scale 1:20 Units in Meters: Cebu Principal AirportDocument2 paginiScale 1:20 Units in Meters: Cebu Principal AirportHanna PorrasÎncă nu există evaluări
- ICAO - Global Air Navigation Plan (2013 - 2028) PDFDocument128 paginiICAO - Global Air Navigation Plan (2013 - 2028) PDFValmir AndradeÎncă nu există evaluări
- UAV Pusher ConfigurationDocument2 paginiUAV Pusher Configurationdaniel.dupreÎncă nu există evaluări
- Flight Planning Exam 3Document19 paginiFlight Planning Exam 3momanbh100% (1)
- Area Rule Richard Whitcomb PDFDocument16 paginiArea Rule Richard Whitcomb PDFMuthyala AkhilÎncă nu există evaluări
- Factsheets - Mitsubishi A6M2 ZeroDocument1 paginăFactsheets - Mitsubishi A6M2 Zeroseafire47Încă nu există evaluări
- 2 - 06277 Rev - MDL eFX IFE Config 07 A318 TL10525Document9 pagini2 - 06277 Rev - MDL eFX IFE Config 07 A318 TL10525Santiago Henao100% (1)
- Normal OperationDocument21 paginiNormal OperationDiego GualsaquiÎncă nu există evaluări
- STEARMAN WWFSv4i3Document11 paginiSTEARMAN WWFSv4i3Jessie BechaydaÎncă nu există evaluări
- Bell 412 Pilot Training Manual: FlightsafetyDocument601 paginiBell 412 Pilot Training Manual: FlightsafetyDiego Lopez ChampinÎncă nu există evaluări
- Flight Briefing VFR LSGL (Lausanne) - LSZB (Bern) : RouteDocument3 paginiFlight Briefing VFR LSGL (Lausanne) - LSZB (Bern) : RouteReljaÎncă nu există evaluări
- Get TRDoc 2Document406 paginiGet TRDoc 2r-s-harveyÎncă nu există evaluări
- SH-3 Sea King - History Wars Weapons PDFDocument2 paginiSH-3 Sea King - History Wars Weapons PDFchelcarÎncă nu există evaluări
- US Navy Ramjet DevelopmentDocument37 paginiUS Navy Ramjet Developmentbring it on100% (1)
- (Warpaint Series No.23) Fairey GannetDocument46 pagini(Warpaint Series No.23) Fairey GannetDoloma100% (19)
- Radar Application On Air Traffic ControlDocument13 paginiRadar Application On Air Traffic ControlA.K.M.TOUHIDUR RAHMAN60% (5)
- English Proficiency Test For Aviation: Set 10-PilotDocument13 paginiEnglish Proficiency Test For Aviation: Set 10-PilotDessy KuzmanovaÎncă nu există evaluări
- Flight Mechanics Numericals With SolutionDocument27 paginiFlight Mechanics Numericals With Solutionmanikandan_murugaiahÎncă nu există evaluări