S-ar putea să vă placă și
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- 94 Supra Wiring DiagramsDocument59 pagini94 Supra Wiring DiagramsGaston MerinoÎncă nu există evaluări
- Grounding Bonding Shielding - Vol2Document394 paginiGrounding Bonding Shielding - Vol2armcalderon100% (1)
- Ebooks - KFC Original Recipe ChickenDocument1 paginăEbooks - KFC Original Recipe ChickensourjynxÎncă nu există evaluări
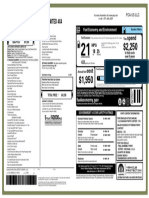
- Your auto insurance payment scheduleDocument4 paginiYour auto insurance payment scheduleYenny VidalÎncă nu există evaluări
- Design Guideline For Industrial Track Projects - BNSF RailwayDocument67 paginiDesign Guideline For Industrial Track Projects - BNSF RailwayKhalil SaberÎncă nu există evaluări
- Urban Design Module IDocument54 paginiUrban Design Module IThirumeni Madavan100% (1)
- 48 Bubalo Airport Productivity Benchmark FinalDocument6 pagini48 Bubalo Airport Productivity Benchmark FinalW.J. ZondagÎncă nu există evaluări
- Part I, Sea Going Ship, Vol I Rules For Classification and Survey.Document148 paginiPart I, Sea Going Ship, Vol I Rules For Classification and Survey.Angjuang Adi Panji PratamaÎncă nu există evaluări
- User Manuel For L1 - Xplorer CherokeeDocument16 paginiUser Manuel For L1 - Xplorer CherokeeIonut Gabriel GavrilaÎncă nu există evaluări
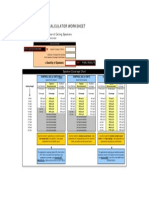
- Ceiling Speakers Calculator SheetDocument1 paginăCeiling Speakers Calculator SheetIhab A OsmanÎncă nu există evaluări
- X50 Favorites E1Document2 paginiX50 Favorites E1Ihab A Osman100% (1)
- New Zealand System of Buoys and BeaconsDocument28 paginiNew Zealand System of Buoys and BeaconsIhab A OsmanÎncă nu există evaluări
- Radio SpecsDocument10 paginiRadio SpecsIhab A OsmanÎncă nu există evaluări
- Caterpillar Installation of Manual Voltage ControlDocument2 paginiCaterpillar Installation of Manual Voltage ControlIhab A OsmanÎncă nu există evaluări
- Us CG GuideUS Cost GuardDocument1 paginăUs CG GuideUS Cost GuardIhab A OsmanÎncă nu există evaluări
- SI Units, Color Diagram (1s) PDFDocument1 paginăSI Units, Color Diagram (1s) PDFMaurício Vicente TavaresÎncă nu există evaluări
- UF98Document112 paginiUF98Ihab A OsmanÎncă nu există evaluări
- Emergency Management Institute FY13 CatalogDocument312 paginiEmergency Management Institute FY13 CatalogIhab A Osman100% (1)
- Lightweight Multi-Band Tappers 350-2700 MHzDocument1 paginăLightweight Multi-Band Tappers 350-2700 MHzIhab A OsmanÎncă nu există evaluări
- DAS Support For MIMO AntennasDocument2 paginiDAS Support For MIMO AntennasIhab A OsmanÎncă nu există evaluări
- DatasheetDocument2 paginiDatasheetIhab A Osman100% (1)
- Incendio Diferencia Entre LAZOS CLASE A Y B A05-1003Document21 paginiIncendio Diferencia Entre LAZOS CLASE A Y B A05-1003rafaelÎncă nu există evaluări
- Radio ShelterDocument14 paginiRadio ShelterIhab A OsmanÎncă nu există evaluări
- Traffic ModelingDocument19 paginiTraffic ModelingIhab A OsmanÎncă nu există evaluări
- AMX Product CatalogDocument118 paginiAMX Product CatalogIhab A OsmanÎncă nu există evaluări
- Technology For Hold Baggage ScreeningDocument23 paginiTechnology For Hold Baggage ScreeningIhab A OsmanÎncă nu există evaluări
- Model-Based Urban Road Network Performance Measurement Using Travel Time Reliability A Case Study of Addis Ababa City, EthiopiaDocument7 paginiModel-Based Urban Road Network Performance Measurement Using Travel Time Reliability A Case Study of Addis Ababa City, EthiopiaEmer Tucay QuezonÎncă nu există evaluări
- Grand Cherokee Limited 4X4: SpendDocument1 paginăGrand Cherokee Limited 4X4: SpendRachelÎncă nu există evaluări
- United States v. Stephen Digiovanni, 4th Cir. (2011)Document26 paginiUnited States v. Stephen Digiovanni, 4th Cir. (2011)Scribd Government DocsÎncă nu există evaluări
- MICRO PLAN FOR PRAYAGRAJ CITY AIR QUALITY IMPROVEMENTDocument161 paginiMICRO PLAN FOR PRAYAGRAJ CITY AIR QUALITY IMPROVEMENTAnusha Kant100% (1)
- CV 7735/13 APR/PIK-LUX: - Not For Real World NavigationDocument37 paginiCV 7735/13 APR/PIK-LUX: - Not For Real World NavigationSamuel AlmecigaÎncă nu există evaluări
- 2019 Cylinder Catalog - Unlinked HERCULES PDFDocument176 pagini2019 Cylinder Catalog - Unlinked HERCULES PDFRafhael Tapia ZunigaÎncă nu există evaluări
- Curriculum Vitae Orlando Mejia EnglishDocument3 paginiCurriculum Vitae Orlando Mejia EnglishElieth FloresÎncă nu există evaluări
- Brake Cooling SystemDocument25 paginiBrake Cooling Systemthabsheer palakkanÎncă nu există evaluări
- Yeild Management AssignmentDocument12 paginiYeild Management AssignmentVikram Pratap SinghÎncă nu există evaluări
- Chapter 18 - Pavement DesignDocument18 paginiChapter 18 - Pavement DesignDiyoke HenryÎncă nu există evaluări
- Dgo Price List 2016: Item No. Item Description Unit Unit CostDocument2 paginiDgo Price List 2016: Item No. Item Description Unit Unit CostDino Garzon OcinoÎncă nu există evaluări
- Considerations in Planning The Construction StagingDocument58 paginiConsiderations in Planning The Construction StagingHenry TuraldeÎncă nu există evaluări
- Time Sensitive Supply Chain Operations in Fruits and Vegetables Market at Koyambedu, ChennaiDocument3 paginiTime Sensitive Supply Chain Operations in Fruits and Vegetables Market at Koyambedu, ChennaiRoobini RajendranÎncă nu există evaluări
- DesalinizaciónDocument46 paginiDesalinizaciónMarco Antonio Gutiérrez TorresÎncă nu există evaluări
- 電話對話Phone Conversation at Service CounterDocument8 pagini電話對話Phone Conversation at Service CounterFrandhoni UtomoÎncă nu există evaluări
- Ista 3eDocument4 paginiIsta 3eduygu9merve100% (1)
- Transmission Line Upgrade Project in ProbolinggoDocument1 paginăTransmission Line Upgrade Project in ProbolinggoirfanÎncă nu există evaluări
- Record: Finance, Taxation, Pricing, Economic Analysis, Socioeconomics, ManagementDocument207 paginiRecord: Finance, Taxation, Pricing, Economic Analysis, Socioeconomics, ManagementThe Contractor YTÎncă nu există evaluări
- Fleet Maintenance ProgramDocument6 paginiFleet Maintenance ProgramTariq Khan100% (1)
- Designated Trade DivisionsDocument9 paginiDesignated Trade Divisionschi hin choyÎncă nu există evaluări
- 1 Edwin HWoodruff ASelectionDocument25 pagini1 Edwin HWoodruff ASelectionEswar StarkÎncă nu există evaluări
- TRACE - Romania - CLUJ NAPOCA - OptimizedDocument99 paginiTRACE - Romania - CLUJ NAPOCA - OptimizedCosmin RadulescuÎncă nu există evaluări
- Transportation: Edit EditDocument3 paginiTransportation: Edit EditRebecca JordanÎncă nu există evaluări
- STEGO Catalogue 2010 enDocument56 paginiSTEGO Catalogue 2010 enPercival A-ayoÎncă nu există evaluări